
Package Summary
| Version | 0.6.0 |
| License | Apache 2 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
Authors
TimeDelayEstimation
This delay estimation node estimates a time delay from inputs to outputs for accel, brake, and steer.
Input / Response
The following topics are used to estimate the delay.
-
/vehicle/raw_vehicle_cmd: used as accel/brake target value -
/control/control_cmd: used as steer target value -
/calibration/vehicle/accel_status: used as accel observed value -
/calibration/vehicle/brake_status: used as brake observed value -
/vehicle/status/steering: used as steer observed value -
/calibration/vehicle/is_engage: used to check the driving operation status
output.
For users, the TimeDelay.msg output contains the following items:
- time_delay: Estimated time delay.
- mean: Mean value of the estimated time delay
- stddev: Standard deviation of the estimated time delay
- is_valid_data: Validity determination of the current data
- first_order_model_coefficients:size 2 array of model coefficients(b,k,t)
- second_order_model_coefficients:size 2 array of model coefficients(m,b,k,t)
In addition, the following items are output for developers.
- Mean average error of delay estimation
- Standard deviation of the mean error of delay estimation
These values can be confirmed in rqt_multiplot, described below.
How to Run Time Delay Estimator
Note: You need to build the Autoware beforehand.
The following command will start the delay estimation node.
ros2 launch time_delay_estimator time_delay_estimator.launch.xml is_showing_debug_graph:=true

Change the estimator type
You can decide the estimator_type with the following parameters
- “cc” : Cross Correlation
- “ls” : Least Squared
- “ls2” : Least Squared Second
Note: Only “cc” Cross Correlation will display the debug graph
How to check the estimated delay
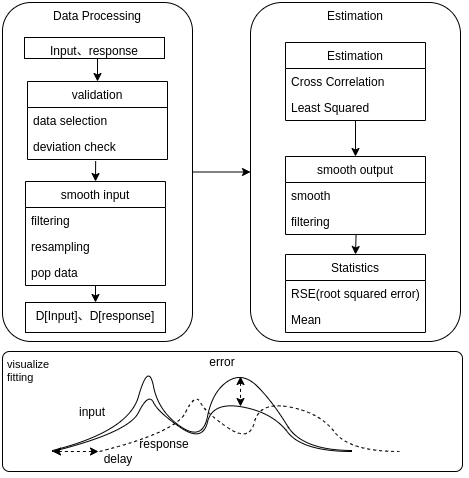
The necessary information is plotted in the rqt_multiplot, which displays the following information from top to bottom.
- First row: Input data processing results examination
- Second row: Estimation results confirmation
- Third row: The confidence level of the estimation results
- Fourth row: Input/output error after delay compensation
Input data processing results examination
Check the input and output data. It is also used to adjust parameters of the estimation logic.
- input raw : input data
- response raw : response data
- input processed : input data after compensation (*)
- response processed : response data after compensation (*)
- data stddev : standard deviation of the data used for estimation (used to determine validity)
-
is valid data : Whether the data is valid or not
- 0.0 : invalid because the standard deviation is less than the threshold (
*_min_stddev_threshold). - 1.0 : valid because the standard deviation is greater than the threshold (
*_min_stddev_threshold).
- 0.0 : invalid because the standard deviation is less than the threshold (
(*) Smoothing, normalization, and resampling are applied as preprocessing.
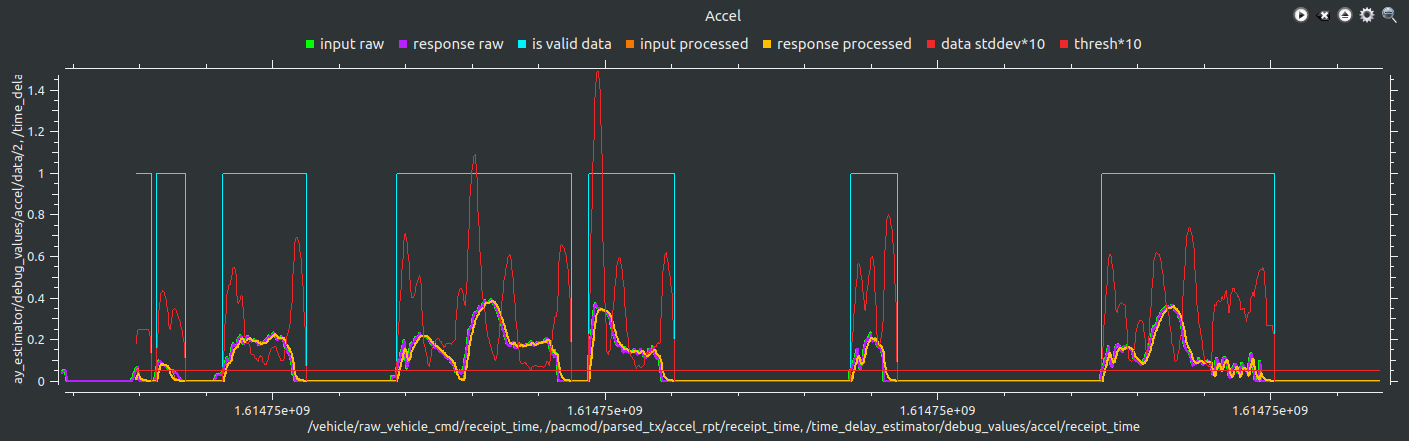
You need to adjust the value of *_min_stddev_threshold according to the standard deviation to determine the validity of the data.
Estimation results confirmation
Check the estimation results.
- delay : Time delay estimated at each step
- average : Average of the time delays
- stddev : Standard deviation of the estimated delay
File truncated at 100 lines [see the full file](https://github.com/autowarefoundation/autoware_tools/tree/main/vehicle/time_delay_estimator/README.md)
Changelog for package time_delay_estimator
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Yutaka Kondo, awf-autoware-bot[bot], yabuta
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| plotjuggler | |
| plotjuggler_ros | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_vehicle_msgs | |
| calibration_adapter | |
| estimator_utils | |
| rclcpp | |
| rclpy | |
| std_msgs | |
| tier4_calibration_msgs |
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
| Name | Deps |
|---|---|
| parameter_estimator |
Launch files
- launch/general_time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- data_name1 [default: accel]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
- launch/pacmod_time_delay_estimator.launch.xml
-
- is_showing_debug_info [default: false]
- is_showing_debug_graph [default: false]
- valid_min_velocity [default: 5.0]
- estimator_type [default: cc]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/time_delay_estimator_param.yaml]
- launch/time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
Messages
Services
Plugins
Recent questions tagged time_delay_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache 2 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
Authors
TimeDelayEstimation
This delay estimation node estimates a time delay from inputs to outputs for accel, brake, and steer.
Input / Response
The following topics are used to estimate the delay.
-
/vehicle/raw_vehicle_cmd: used as accel/brake target value -
/control/control_cmd: used as steer target value -
/calibration/vehicle/accel_status: used as accel observed value -
/calibration/vehicle/brake_status: used as brake observed value -
/vehicle/status/steering: used as steer observed value -
/calibration/vehicle/is_engage: used to check the driving operation status
output.
For users, the TimeDelay.msg output contains the following items:
- time_delay: Estimated time delay.
- mean: Mean value of the estimated time delay
- stddev: Standard deviation of the estimated time delay
- is_valid_data: Validity determination of the current data
- first_order_model_coefficients:size 2 array of model coefficients(b,k,t)
- second_order_model_coefficients:size 2 array of model coefficients(m,b,k,t)
In addition, the following items are output for developers.
- Mean average error of delay estimation
- Standard deviation of the mean error of delay estimation
These values can be confirmed in rqt_multiplot, described below.
How to Run Time Delay Estimator
Note: You need to build the Autoware beforehand.
The following command will start the delay estimation node.
ros2 launch time_delay_estimator time_delay_estimator.launch.xml is_showing_debug_graph:=true
Change the estimator type
You can decide the estimator_type with the following parameters
- “cc” : Cross Correlation
- “ls” : Least Squared
- “ls2” : Least Squared Second
Note: Only “cc” Cross Correlation will display the debug graph
How to check the estimated delay
The necessary information is plotted in the rqt_multiplot, which displays the following information from top to bottom.
- First row: Input data processing results examination
- Second row: Estimation results confirmation
- Third row: The confidence level of the estimation results
- Fourth row: Input/output error after delay compensation
Input data processing results examination
Check the input and output data. It is also used to adjust parameters of the estimation logic.
- input raw : input data
- response raw : response data
- input processed : input data after compensation (*)
- response processed : response data after compensation (*)
- data stddev : standard deviation of the data used for estimation (used to determine validity)
-
is valid data : Whether the data is valid or not
- 0.0 : invalid because the standard deviation is less than the threshold (
*_min_stddev_threshold). - 1.0 : valid because the standard deviation is greater than the threshold (
*_min_stddev_threshold).
- 0.0 : invalid because the standard deviation is less than the threshold (
(*) Smoothing, normalization, and resampling are applied as preprocessing.
You need to adjust the value of *_min_stddev_threshold according to the standard deviation to determine the validity of the data.
Estimation results confirmation
Check the estimation results.
- delay : Time delay estimated at each step
- average : Average of the time delays
- stddev : Standard deviation of the estimated delay
File truncated at 100 lines [see the full file](https://github.com/autowarefoundation/autoware_tools/tree/main/vehicle/time_delay_estimator/README.md)
Changelog for package time_delay_estimator
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Yutaka Kondo, awf-autoware-bot[bot], yabuta
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| plotjuggler | |
| plotjuggler_ros | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_vehicle_msgs | |
| calibration_adapter | |
| estimator_utils | |
| rclcpp | |
| rclpy | |
| std_msgs | |
| tier4_calibration_msgs |
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
| Name | Deps |
|---|---|
| parameter_estimator |
Launch files
- launch/general_time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- data_name1 [default: accel]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
- launch/pacmod_time_delay_estimator.launch.xml
-
- is_showing_debug_info [default: false]
- is_showing_debug_graph [default: false]
- valid_min_velocity [default: 5.0]
- estimator_type [default: cc]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/time_delay_estimator_param.yaml]
- launch/time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
Messages
Services
Plugins
Recent questions tagged time_delay_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache 2 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
Authors
TimeDelayEstimation
This delay estimation node estimates a time delay from inputs to outputs for accel, brake, and steer.
Input / Response
The following topics are used to estimate the delay.
-
/vehicle/raw_vehicle_cmd: used as accel/brake target value -
/control/control_cmd: used as steer target value -
/calibration/vehicle/accel_status: used as accel observed value -
/calibration/vehicle/brake_status: used as brake observed value -
/vehicle/status/steering: used as steer observed value -
/calibration/vehicle/is_engage: used to check the driving operation status
output.
For users, the TimeDelay.msg output contains the following items:
- time_delay: Estimated time delay.
- mean: Mean value of the estimated time delay
- stddev: Standard deviation of the estimated time delay
- is_valid_data: Validity determination of the current data
- first_order_model_coefficients:size 2 array of model coefficients(b,k,t)
- second_order_model_coefficients:size 2 array of model coefficients(m,b,k,t)
In addition, the following items are output for developers.
- Mean average error of delay estimation
- Standard deviation of the mean error of delay estimation
These values can be confirmed in rqt_multiplot, described below.
How to Run Time Delay Estimator
Note: You need to build the Autoware beforehand.
The following command will start the delay estimation node.
ros2 launch time_delay_estimator time_delay_estimator.launch.xml is_showing_debug_graph:=true
Change the estimator type
You can decide the estimator_type with the following parameters
- “cc” : Cross Correlation
- “ls” : Least Squared
- “ls2” : Least Squared Second
Note: Only “cc” Cross Correlation will display the debug graph
How to check the estimated delay
The necessary information is plotted in the rqt_multiplot, which displays the following information from top to bottom.
- First row: Input data processing results examination
- Second row: Estimation results confirmation
- Third row: The confidence level of the estimation results
- Fourth row: Input/output error after delay compensation
Input data processing results examination
Check the input and output data. It is also used to adjust parameters of the estimation logic.
- input raw : input data
- response raw : response data
- input processed : input data after compensation (*)
- response processed : response data after compensation (*)
- data stddev : standard deviation of the data used for estimation (used to determine validity)
-
is valid data : Whether the data is valid or not
- 0.0 : invalid because the standard deviation is less than the threshold (
*_min_stddev_threshold). - 1.0 : valid because the standard deviation is greater than the threshold (
*_min_stddev_threshold).
- 0.0 : invalid because the standard deviation is less than the threshold (
(*) Smoothing, normalization, and resampling are applied as preprocessing.
You need to adjust the value of *_min_stddev_threshold according to the standard deviation to determine the validity of the data.
Estimation results confirmation
Check the estimation results.
- delay : Time delay estimated at each step
- average : Average of the time delays
- stddev : Standard deviation of the estimated delay
File truncated at 100 lines [see the full file](https://github.com/autowarefoundation/autoware_tools/tree/main/vehicle/time_delay_estimator/README.md)
Changelog for package time_delay_estimator
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Yutaka Kondo, awf-autoware-bot[bot], yabuta
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| plotjuggler | |
| plotjuggler_ros | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_vehicle_msgs | |
| calibration_adapter | |
| estimator_utils | |
| rclcpp | |
| rclpy | |
| std_msgs | |
| tier4_calibration_msgs |
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
| Name | Deps |
|---|---|
| parameter_estimator |
Launch files
- launch/general_time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- data_name1 [default: accel]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
- launch/pacmod_time_delay_estimator.launch.xml
-
- is_showing_debug_info [default: false]
- is_showing_debug_graph [default: false]
- valid_min_velocity [default: 5.0]
- estimator_type [default: cc]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/time_delay_estimator_param.yaml]
- launch/time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
Messages
Services
Plugins
Recent questions tagged time_delay_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache 2 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
Authors
TimeDelayEstimation
This delay estimation node estimates a time delay from inputs to outputs for accel, brake, and steer.
Input / Response
The following topics are used to estimate the delay.
-
/vehicle/raw_vehicle_cmd: used as accel/brake target value -
/control/control_cmd: used as steer target value -
/calibration/vehicle/accel_status: used as accel observed value -
/calibration/vehicle/brake_status: used as brake observed value -
/vehicle/status/steering: used as steer observed value -
/calibration/vehicle/is_engage: used to check the driving operation status
output.
For users, the TimeDelay.msg output contains the following items:
- time_delay: Estimated time delay.
- mean: Mean value of the estimated time delay
- stddev: Standard deviation of the estimated time delay
- is_valid_data: Validity determination of the current data
- first_order_model_coefficients:size 2 array of model coefficients(b,k,t)
- second_order_model_coefficients:size 2 array of model coefficients(m,b,k,t)
In addition, the following items are output for developers.
- Mean average error of delay estimation
- Standard deviation of the mean error of delay estimation
These values can be confirmed in rqt_multiplot, described below.
How to Run Time Delay Estimator
Note: You need to build the Autoware beforehand.
The following command will start the delay estimation node.
ros2 launch time_delay_estimator time_delay_estimator.launch.xml is_showing_debug_graph:=true
Change the estimator type
You can decide the estimator_type with the following parameters
- “cc” : Cross Correlation
- “ls” : Least Squared
- “ls2” : Least Squared Second
Note: Only “cc” Cross Correlation will display the debug graph
How to check the estimated delay
The necessary information is plotted in the rqt_multiplot, which displays the following information from top to bottom.
- First row: Input data processing results examination
- Second row: Estimation results confirmation
- Third row: The confidence level of the estimation results
- Fourth row: Input/output error after delay compensation
Input data processing results examination
Check the input and output data. It is also used to adjust parameters of the estimation logic.
- input raw : input data
- response raw : response data
- input processed : input data after compensation (*)
- response processed : response data after compensation (*)
- data stddev : standard deviation of the data used for estimation (used to determine validity)
-
is valid data : Whether the data is valid or not
- 0.0 : invalid because the standard deviation is less than the threshold (
*_min_stddev_threshold). - 1.0 : valid because the standard deviation is greater than the threshold (
*_min_stddev_threshold).
- 0.0 : invalid because the standard deviation is less than the threshold (
(*) Smoothing, normalization, and resampling are applied as preprocessing.
You need to adjust the value of *_min_stddev_threshold according to the standard deviation to determine the validity of the data.
Estimation results confirmation
Check the estimation results.
- delay : Time delay estimated at each step
- average : Average of the time delays
- stddev : Standard deviation of the estimated delay
File truncated at 100 lines [see the full file](https://github.com/autowarefoundation/autoware_tools/tree/main/vehicle/time_delay_estimator/README.md)
Changelog for package time_delay_estimator
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Yutaka Kondo, awf-autoware-bot[bot], yabuta
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| plotjuggler | |
| plotjuggler_ros | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_vehicle_msgs | |
| calibration_adapter | |
| estimator_utils | |
| rclcpp | |
| rclpy | |
| std_msgs | |
| tier4_calibration_msgs |
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
| Name | Deps |
|---|---|
| parameter_estimator |
Launch files
- launch/general_time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- data_name1 [default: accel]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
- launch/pacmod_time_delay_estimator.launch.xml
-
- is_showing_debug_info [default: false]
- is_showing_debug_graph [default: false]
- valid_min_velocity [default: 5.0]
- estimator_type [default: cc]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/time_delay_estimator_param.yaml]
- launch/time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
Messages
Services
Plugins
Recent questions tagged time_delay_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache 2 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
Authors
TimeDelayEstimation
This delay estimation node estimates a time delay from inputs to outputs for accel, brake, and steer.
Input / Response
The following topics are used to estimate the delay.
-
/vehicle/raw_vehicle_cmd: used as accel/brake target value -
/control/control_cmd: used as steer target value -
/calibration/vehicle/accel_status: used as accel observed value -
/calibration/vehicle/brake_status: used as brake observed value -
/vehicle/status/steering: used as steer observed value -
/calibration/vehicle/is_engage: used to check the driving operation status
output.
For users, the TimeDelay.msg output contains the following items:
- time_delay: Estimated time delay.
- mean: Mean value of the estimated time delay
- stddev: Standard deviation of the estimated time delay
- is_valid_data: Validity determination of the current data
- first_order_model_coefficients:size 2 array of model coefficients(b,k,t)
- second_order_model_coefficients:size 2 array of model coefficients(m,b,k,t)
In addition, the following items are output for developers.
- Mean average error of delay estimation
- Standard deviation of the mean error of delay estimation
These values can be confirmed in rqt_multiplot, described below.
How to Run Time Delay Estimator
Note: You need to build the Autoware beforehand.
The following command will start the delay estimation node.
ros2 launch time_delay_estimator time_delay_estimator.launch.xml is_showing_debug_graph:=true
Change the estimator type
You can decide the estimator_type with the following parameters
- “cc” : Cross Correlation
- “ls” : Least Squared
- “ls2” : Least Squared Second
Note: Only “cc” Cross Correlation will display the debug graph
How to check the estimated delay
The necessary information is plotted in the rqt_multiplot, which displays the following information from top to bottom.
- First row: Input data processing results examination
- Second row: Estimation results confirmation
- Third row: The confidence level of the estimation results
- Fourth row: Input/output error after delay compensation
Input data processing results examination
Check the input and output data. It is also used to adjust parameters of the estimation logic.
- input raw : input data
- response raw : response data
- input processed : input data after compensation (*)
- response processed : response data after compensation (*)
- data stddev : standard deviation of the data used for estimation (used to determine validity)
-
is valid data : Whether the data is valid or not
- 0.0 : invalid because the standard deviation is less than the threshold (
*_min_stddev_threshold). - 1.0 : valid because the standard deviation is greater than the threshold (
*_min_stddev_threshold).
- 0.0 : invalid because the standard deviation is less than the threshold (
(*) Smoothing, normalization, and resampling are applied as preprocessing.
You need to adjust the value of *_min_stddev_threshold according to the standard deviation to determine the validity of the data.
Estimation results confirmation
Check the estimation results.
- delay : Time delay estimated at each step
- average : Average of the time delays
- stddev : Standard deviation of the estimated delay
File truncated at 100 lines [see the full file](https://github.com/autowarefoundation/autoware_tools/tree/main/vehicle/time_delay_estimator/README.md)
Changelog for package time_delay_estimator
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Yutaka Kondo, awf-autoware-bot[bot], yabuta
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| plotjuggler | |
| plotjuggler_ros | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_vehicle_msgs | |
| calibration_adapter | |
| estimator_utils | |
| rclcpp | |
| rclpy | |
| std_msgs | |
| tier4_calibration_msgs |
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
| Name | Deps |
|---|---|
| parameter_estimator |
Launch files
- launch/general_time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- data_name1 [default: accel]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
- launch/pacmod_time_delay_estimator.launch.xml
-
- is_showing_debug_info [default: false]
- is_showing_debug_graph [default: false]
- valid_min_velocity [default: 5.0]
- estimator_type [default: cc]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/time_delay_estimator_param.yaml]
- launch/time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
Messages
Services
Plugins
Recent questions tagged time_delay_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache 2 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
Authors
TimeDelayEstimation
This delay estimation node estimates a time delay from inputs to outputs for accel, brake, and steer.
Input / Response
The following topics are used to estimate the delay.
-
/vehicle/raw_vehicle_cmd: used as accel/brake target value -
/control/control_cmd: used as steer target value -
/calibration/vehicle/accel_status: used as accel observed value -
/calibration/vehicle/brake_status: used as brake observed value -
/vehicle/status/steering: used as steer observed value -
/calibration/vehicle/is_engage: used to check the driving operation status
output.
For users, the TimeDelay.msg output contains the following items:
- time_delay: Estimated time delay.
- mean: Mean value of the estimated time delay
- stddev: Standard deviation of the estimated time delay
- is_valid_data: Validity determination of the current data
- first_order_model_coefficients:size 2 array of model coefficients(b,k,t)
- second_order_model_coefficients:size 2 array of model coefficients(m,b,k,t)
In addition, the following items are output for developers.
- Mean average error of delay estimation
- Standard deviation of the mean error of delay estimation
These values can be confirmed in rqt_multiplot, described below.
How to Run Time Delay Estimator
Note: You need to build the Autoware beforehand.
The following command will start the delay estimation node.
ros2 launch time_delay_estimator time_delay_estimator.launch.xml is_showing_debug_graph:=true
Change the estimator type
You can decide the estimator_type with the following parameters
- “cc” : Cross Correlation
- “ls” : Least Squared
- “ls2” : Least Squared Second
Note: Only “cc” Cross Correlation will display the debug graph
How to check the estimated delay
The necessary information is plotted in the rqt_multiplot, which displays the following information from top to bottom.
- First row: Input data processing results examination
- Second row: Estimation results confirmation
- Third row: The confidence level of the estimation results
- Fourth row: Input/output error after delay compensation
Input data processing results examination
Check the input and output data. It is also used to adjust parameters of the estimation logic.
- input raw : input data
- response raw : response data
- input processed : input data after compensation (*)
- response processed : response data after compensation (*)
- data stddev : standard deviation of the data used for estimation (used to determine validity)
-
is valid data : Whether the data is valid or not
- 0.0 : invalid because the standard deviation is less than the threshold (
*_min_stddev_threshold). - 1.0 : valid because the standard deviation is greater than the threshold (
*_min_stddev_threshold).
- 0.0 : invalid because the standard deviation is less than the threshold (
(*) Smoothing, normalization, and resampling are applied as preprocessing.
You need to adjust the value of *_min_stddev_threshold according to the standard deviation to determine the validity of the data.
Estimation results confirmation
Check the estimation results.
- delay : Time delay estimated at each step
- average : Average of the time delays
- stddev : Standard deviation of the estimated delay
File truncated at 100 lines [see the full file](https://github.com/autowarefoundation/autoware_tools/tree/main/vehicle/time_delay_estimator/README.md)
Changelog for package time_delay_estimator
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Yutaka Kondo, awf-autoware-bot[bot], yabuta
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| plotjuggler | |
| plotjuggler_ros | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_vehicle_msgs | |
| calibration_adapter | |
| estimator_utils | |
| rclcpp | |
| rclpy | |
| std_msgs | |
| tier4_calibration_msgs |
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
| Name | Deps |
|---|---|
| parameter_estimator |
Launch files
- launch/general_time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- data_name1 [default: accel]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
- launch/pacmod_time_delay_estimator.launch.xml
-
- is_showing_debug_info [default: false]
- is_showing_debug_graph [default: false]
- valid_min_velocity [default: 5.0]
- estimator_type [default: cc]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/time_delay_estimator_param.yaml]
- launch/time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
Messages
Services
Plugins
Recent questions tagged time_delay_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache 2 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
Authors
TimeDelayEstimation
This delay estimation node estimates a time delay from inputs to outputs for accel, brake, and steer.
Input / Response
The following topics are used to estimate the delay.
-
/vehicle/raw_vehicle_cmd: used as accel/brake target value -
/control/control_cmd: used as steer target value -
/calibration/vehicle/accel_status: used as accel observed value -
/calibration/vehicle/brake_status: used as brake observed value -
/vehicle/status/steering: used as steer observed value -
/calibration/vehicle/is_engage: used to check the driving operation status
output.
For users, the TimeDelay.msg output contains the following items:
- time_delay: Estimated time delay.
- mean: Mean value of the estimated time delay
- stddev: Standard deviation of the estimated time delay
- is_valid_data: Validity determination of the current data
- first_order_model_coefficients:size 2 array of model coefficients(b,k,t)
- second_order_model_coefficients:size 2 array of model coefficients(m,b,k,t)
In addition, the following items are output for developers.
- Mean average error of delay estimation
- Standard deviation of the mean error of delay estimation
These values can be confirmed in rqt_multiplot, described below.
How to Run Time Delay Estimator
Note: You need to build the Autoware beforehand.
The following command will start the delay estimation node.
ros2 launch time_delay_estimator time_delay_estimator.launch.xml is_showing_debug_graph:=true
Change the estimator type
You can decide the estimator_type with the following parameters
- “cc” : Cross Correlation
- “ls” : Least Squared
- “ls2” : Least Squared Second
Note: Only “cc” Cross Correlation will display the debug graph
How to check the estimated delay
The necessary information is plotted in the rqt_multiplot, which displays the following information from top to bottom.
- First row: Input data processing results examination
- Second row: Estimation results confirmation
- Third row: The confidence level of the estimation results
- Fourth row: Input/output error after delay compensation
Input data processing results examination
Check the input and output data. It is also used to adjust parameters of the estimation logic.
- input raw : input data
- response raw : response data
- input processed : input data after compensation (*)
- response processed : response data after compensation (*)
- data stddev : standard deviation of the data used for estimation (used to determine validity)
-
is valid data : Whether the data is valid or not
- 0.0 : invalid because the standard deviation is less than the threshold (
*_min_stddev_threshold). - 1.0 : valid because the standard deviation is greater than the threshold (
*_min_stddev_threshold).
- 0.0 : invalid because the standard deviation is less than the threshold (
(*) Smoothing, normalization, and resampling are applied as preprocessing.
You need to adjust the value of *_min_stddev_threshold according to the standard deviation to determine the validity of the data.
Estimation results confirmation
Check the estimation results.
- delay : Time delay estimated at each step
- average : Average of the time delays
- stddev : Standard deviation of the estimated delay
File truncated at 100 lines [see the full file](https://github.com/autowarefoundation/autoware_tools/tree/main/vehicle/time_delay_estimator/README.md)
Changelog for package time_delay_estimator
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Yutaka Kondo, awf-autoware-bot[bot], yabuta
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| plotjuggler | |
| plotjuggler_ros | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_vehicle_msgs | |
| calibration_adapter | |
| estimator_utils | |
| rclcpp | |
| rclpy | |
| std_msgs | |
| tier4_calibration_msgs |
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
| Name | Deps |
|---|---|
| parameter_estimator |
Launch files
- launch/general_time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- data_name1 [default: accel]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
- launch/pacmod_time_delay_estimator.launch.xml
-
- is_showing_debug_info [default: false]
- is_showing_debug_graph [default: false]
- valid_min_velocity [default: 5.0]
- estimator_type [default: cc]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/time_delay_estimator_param.yaml]
- launch/time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
Messages
Services
Plugins
Recent questions tagged time_delay_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache 2 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
Authors
TimeDelayEstimation
This delay estimation node estimates a time delay from inputs to outputs for accel, brake, and steer.
Input / Response
The following topics are used to estimate the delay.
-
/vehicle/raw_vehicle_cmd: used as accel/brake target value -
/control/control_cmd: used as steer target value -
/calibration/vehicle/accel_status: used as accel observed value -
/calibration/vehicle/brake_status: used as brake observed value -
/vehicle/status/steering: used as steer observed value -
/calibration/vehicle/is_engage: used to check the driving operation status
output.
For users, the TimeDelay.msg output contains the following items:
- time_delay: Estimated time delay.
- mean: Mean value of the estimated time delay
- stddev: Standard deviation of the estimated time delay
- is_valid_data: Validity determination of the current data
- first_order_model_coefficients:size 2 array of model coefficients(b,k,t)
- second_order_model_coefficients:size 2 array of model coefficients(m,b,k,t)
In addition, the following items are output for developers.
- Mean average error of delay estimation
- Standard deviation of the mean error of delay estimation
These values can be confirmed in rqt_multiplot, described below.
How to Run Time Delay Estimator
Note: You need to build the Autoware beforehand.
The following command will start the delay estimation node.
ros2 launch time_delay_estimator time_delay_estimator.launch.xml is_showing_debug_graph:=true
Change the estimator type
You can decide the estimator_type with the following parameters
- “cc” : Cross Correlation
- “ls” : Least Squared
- “ls2” : Least Squared Second
Note: Only “cc” Cross Correlation will display the debug graph
How to check the estimated delay
The necessary information is plotted in the rqt_multiplot, which displays the following information from top to bottom.
- First row: Input data processing results examination
- Second row: Estimation results confirmation
- Third row: The confidence level of the estimation results
- Fourth row: Input/output error after delay compensation
Input data processing results examination
Check the input and output data. It is also used to adjust parameters of the estimation logic.
- input raw : input data
- response raw : response data
- input processed : input data after compensation (*)
- response processed : response data after compensation (*)
- data stddev : standard deviation of the data used for estimation (used to determine validity)
-
is valid data : Whether the data is valid or not
- 0.0 : invalid because the standard deviation is less than the threshold (
*_min_stddev_threshold). - 1.0 : valid because the standard deviation is greater than the threshold (
*_min_stddev_threshold).
- 0.0 : invalid because the standard deviation is less than the threshold (
(*) Smoothing, normalization, and resampling are applied as preprocessing.
You need to adjust the value of *_min_stddev_threshold according to the standard deviation to determine the validity of the data.
Estimation results confirmation
Check the estimation results.
- delay : Time delay estimated at each step
- average : Average of the time delays
- stddev : Standard deviation of the estimated delay
File truncated at 100 lines [see the full file](https://github.com/autowarefoundation/autoware_tools/tree/main/vehicle/time_delay_estimator/README.md)
Changelog for package time_delay_estimator
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Yutaka Kondo, awf-autoware-bot[bot], yabuta
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| plotjuggler | |
| plotjuggler_ros | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_vehicle_msgs | |
| calibration_adapter | |
| estimator_utils | |
| rclcpp | |
| rclpy | |
| std_msgs | |
| tier4_calibration_msgs |
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
| Name | Deps |
|---|---|
| parameter_estimator |
Launch files
- launch/general_time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- data_name1 [default: accel]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
- launch/pacmod_time_delay_estimator.launch.xml
-
- is_showing_debug_info [default: false]
- is_showing_debug_graph [default: false]
- valid_min_velocity [default: 5.0]
- estimator_type [default: cc]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/time_delay_estimator_param.yaml]
- launch/time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
Messages
Services
Plugins
Recent questions tagged time_delay_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache 2 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
Authors
TimeDelayEstimation
This delay estimation node estimates a time delay from inputs to outputs for accel, brake, and steer.
Input / Response
The following topics are used to estimate the delay.
-
/vehicle/raw_vehicle_cmd: used as accel/brake target value -
/control/control_cmd: used as steer target value -
/calibration/vehicle/accel_status: used as accel observed value -
/calibration/vehicle/brake_status: used as brake observed value -
/vehicle/status/steering: used as steer observed value -
/calibration/vehicle/is_engage: used to check the driving operation status
output.
For users, the TimeDelay.msg output contains the following items:
- time_delay: Estimated time delay.
- mean: Mean value of the estimated time delay
- stddev: Standard deviation of the estimated time delay
- is_valid_data: Validity determination of the current data
- first_order_model_coefficients:size 2 array of model coefficients(b,k,t)
- second_order_model_coefficients:size 2 array of model coefficients(m,b,k,t)
In addition, the following items are output for developers.
- Mean average error of delay estimation
- Standard deviation of the mean error of delay estimation
These values can be confirmed in rqt_multiplot, described below.
How to Run Time Delay Estimator
Note: You need to build the Autoware beforehand.
The following command will start the delay estimation node.
ros2 launch time_delay_estimator time_delay_estimator.launch.xml is_showing_debug_graph:=true
Change the estimator type
You can decide the estimator_type with the following parameters
- “cc” : Cross Correlation
- “ls” : Least Squared
- “ls2” : Least Squared Second
Note: Only “cc” Cross Correlation will display the debug graph
How to check the estimated delay
The necessary information is plotted in the rqt_multiplot, which displays the following information from top to bottom.
- First row: Input data processing results examination
- Second row: Estimation results confirmation
- Third row: The confidence level of the estimation results
- Fourth row: Input/output error after delay compensation
Input data processing results examination
Check the input and output data. It is also used to adjust parameters of the estimation logic.
- input raw : input data
- response raw : response data
- input processed : input data after compensation (*)
- response processed : response data after compensation (*)
- data stddev : standard deviation of the data used for estimation (used to determine validity)
-
is valid data : Whether the data is valid or not
- 0.0 : invalid because the standard deviation is less than the threshold (
*_min_stddev_threshold). - 1.0 : valid because the standard deviation is greater than the threshold (
*_min_stddev_threshold).
- 0.0 : invalid because the standard deviation is less than the threshold (
(*) Smoothing, normalization, and resampling are applied as preprocessing.
You need to adjust the value of *_min_stddev_threshold according to the standard deviation to determine the validity of the data.
Estimation results confirmation
Check the estimation results.
- delay : Time delay estimated at each step
- average : Average of the time delays
- stddev : Standard deviation of the estimated delay
File truncated at 100 lines [see the full file](https://github.com/autowarefoundation/autoware_tools/tree/main/vehicle/time_delay_estimator/README.md)
Changelog for package time_delay_estimator
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat: add vehicle, control and localization calibration tools (#22)
- add vehicle control localization tools
- style(pre-commit): autofix
- fix pre commit
- Fix to pass cspell about localization
- ignore words from spellcheck
- ROS2 -> ROS 2
- feat: convert autoware_auto_msg to autoware_msg (#42)
- merge
- delete autoware_auto
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- add prefix to vehicle_info_utils
- style(pre-commit): autofix
- fix: add s to VehicleInfoUtil
* fix
Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Shintaro Sakoda <<shintaro.sakoda@tier4.jp>> Co-authored-by: SakodaShintaro <<rgbygscrsedppbwg@gmail.com>> Co-authored-by: tomoya.kimura <<tomoya.kimura@tier4.jp>>
-
Contributors: Yutaka Kondo, awf-autoware-bot[bot], yabuta
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| plotjuggler | |
| plotjuggler_ros | |
| ament_lint_auto | |
| autoware_lint_common | |
| autoware_vehicle_msgs | |
| calibration_adapter | |
| estimator_utils | |
| rclcpp | |
| rclpy | |
| std_msgs | |
| tier4_calibration_msgs |
System Dependencies
| Name |
|---|
| eigen |
Dependant Packages
| Name | Deps |
|---|---|
| parameter_estimator |
Launch files
- launch/general_time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- data_name1 [default: accel]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]
- launch/pacmod_time_delay_estimator.launch.xml
-
- is_showing_debug_info [default: false]
- is_showing_debug_graph [default: false]
- valid_min_velocity [default: 5.0]
- estimator_type [default: cc]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/time_delay_estimator_param.yaml]
- launch/time_delay_estimator.launch.xml
-
- valid_min_velocity [default: 5.0]
- detect_manual_engage [default: true]
- time_delay_estimator_param [default: $(find-pkg-share time_delay_estimator)/config/general_time_delay_estimator_param.yaml]