
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Dai Nguyen
- Yoshi Ri
- Akihisa Nagata
- Taekjin Lee
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_compare_map_segmentation
Purpose
The autoware_compare_map_segmentation is a package that filters the ground points from the input pointcloud by using map info (e.g. pcd, elevation map or split map pointcloud from map_loader interface).
Inner-workings / Algorithms
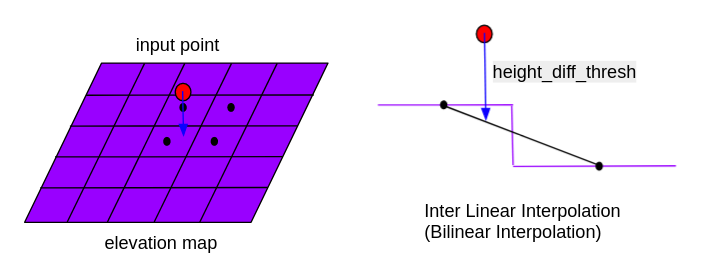
Compare Elevation Map Filter
Compare the z of the input points with the value of elevation_map. The height difference is calculated by the binary integration of neighboring cells. Remove points whose height difference is below the height_diff_thresh.
Distance Based Compare Map Filter
This filter compares the input pointcloud with the map pointcloud using the nearestKSearch function of kdtree and removes points that are close to the map point cloud. The map pointcloud can be loaded statically at once at the beginning or dynamically as the vehicle moves.
Voxel Based Approximate Compare Map Filter
The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them.
Voxel Based Compare Map Filter
The filter loads the map pointcloud (static loading whole map at once at beginning or dynamic loading during vehicle moving) and utilizes VoxelGrid to downsample map pointcloud.
For each point of input pointcloud, the filter use getCentroidIndexAt combine with getGridCoordinates function from VoxelGrid class to check if the downsampled map point existing surrounding input points. Remove the input point which has downsampled map point in voxels containing or being close to the point.
Voxel Distance based Compare Map Filter
This filter is a combination of the distance_based_compare_map_filter and voxel_based_approximate_compare_map_filter. The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid and a k-d tree of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them. For points that do not belong to any voxel grid, they are compared again with the map point cloud using the radiusSearch function of the k-d tree and are removed if they are close enough to the map.
Lanelet Elevation Filter
The Lanelet Elevation Filter filters point clouds based on lanelet elevation information. It creates a grid-based elevation map from lanelet data and filters out points that deviate significantly from the expected road surface height. This filter is useful for removing floating objects, overpass structures, and other non-road elements that should not be considered for ground-level navigation.
The filter processes lanelet maps to extract elevation information at regular grid intervals and uses this information to validate incoming point cloud data. Points that are too far above or below the expected lanelet surface elevation are filtered out.
If incoming point cloud frame differs from target_frame, points will be transformed to target_frame before elevation check.
Inputs / Outputs
Compare Elevation Map Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/elevation_map |
grid_map::msg::GridMap |
elevation map |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
map_layer_name |
string | elevation map layer name | elevation |
map_frame |
float | frame_id of the map that is temporarily used before elevation_map is subscribed | map |
height_diff_thresh |
float | Remove points whose height difference is below this value [m] | 0.15 |
Lanelet Elevation Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/pointcloud |
sensor_msgs::msg::PointCloud2 |
input point cloud |
~/input/lanelet_map |
autoware_map_msgs::msg::LaneletMapBin |
lanelet map |
Output
| Name | Type | Description |
|---|---|---|
~/output/pointcloud |
sensor_msgs::msg::PointCloud2 |
filtered point cloud |
~/debug/elevation_markers |
visualization_msgs::msg::MarkerArray |
elevation grid visualization |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
grid_resolution |
double | Grid cell size in meters for elevation processing | 1.0 |
height_threshold |
double | Maximum height difference from lanelet elevation (meters) | 2.0 |
sampling_distance |
double | Distance between sampled points along lanelet boundaries (meters) | 0.5 |
extension_count |
int | Number of cells to extend around original lanelet points | 5 |
target_frame |
string | Target coordinate frame for processing | map |
cache_directory |
string | Directory for cached grid files | $(find-pkg-share autoware_compare_map_segmentation)/data/lanelet_grid_cache |
require_map_coverage |
bool | If true, only keep points with direct map coverage; reject points requiring interpolation | true |
enable_debug |
bool | Enable debug mode (includes elevation markers and processing time publisher) | false |
Other Filters
Input
File truncated at 100 lines see the full file
Changelog for package autoware_compare_map_segmentation
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat!: remove ROS 2 Galactic codes (#11905)
-
fix(compare_map_segmentation): ignore -Warray-bounds (#11929)
-
fix: qos compatibility (#11878)
-
feat(pointcloud_preprocessor): improve cloud validation (#11853)
-
feat(pointcloud_preprocessor): validate indices (#11852)
-
feat(pointcloud_preprocessor): simplify is_valid (#11851)
-
fix(autoware_compare_map_segmentation): use async service call in VoxelGridDynamicMapLoader to prevent deadlock (#11814)
* refactor(voxel_grid_map_loader): simplify async request handling Replaced blocking wait with a callback mechanism for handling map update requests. This improves responsiveness and error handling when retrieving differential pointcloud maps.
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(autoware_compare_map_segmentation): add missing launch param (#11825)
-
Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome, Taekjin LEE, badai nguyen
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
fix(autoware_compare_map_segmentation): add empty point cloud guards (#11748)
* fix(autoware_compare_map_segmentation): add empty point cloud guards Add validation to check for empty point clouds before processing to prevent undefined behavior in PCL functions and potential crashes.
- Add guard in compare_elevation_map_filter
- Add guard in distance_based_compare_map_filter
- Add guard in voxel_distance_based_compare_map_filter
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK, Yutaka Kondo
0.48.0 (2025-11-18)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(autoware_compare_map_segmentation): add lanelet elevation filter (#11289)
- feat(autoware_compare_map_segmentation): add lanelet elevation filter
* feat(autoware_compare_map_segmentation): fix default height threshold ---------
-
Contributors: Kaan Çolak, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
- Merge remote-tracking branch 'upstream/main' into tmp/TaikiYamada/bump_version_base
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/compare_elevation_map_filter.launch.xml
-
- compare_elevation_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/compare_elevation_map_filter.param.yaml]
- input [default: /input]
- input_elevation_map [default: /input/elevation_map]
- output [default: /output]
- launch/distance_based_compare_map_filter.launch.xml
-
- distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/lanelet_elevation_filter.launch.xml
-
- input_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud]
- input_lanelet_map [default: /map/vector_map]
- output_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud_lanelet_filtered]
- config_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/lanelet_elevation_filter.param.yaml]
- launch/voxel_based_approximate_compare_map_filter.launch.xml
-
- voxel_based_approximate_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_approximate_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/voxel_based_compare_map_filter.launch.xml
-
- voxel_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- pose_with_covariance [default: /localization/pose_estimator/pose_with_covariance]
- output [default: /output]
- map_loader_service [default: /map/get_differential_pointcloud_map]
- launch/voxel_distance_based_compare_map_filter.launch.xml
-
- voxel_distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
Messages
Services
Plugins
Recent questions tagged autoware_compare_map_segmentation at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Dai Nguyen
- Yoshi Ri
- Akihisa Nagata
- Taekjin Lee
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_compare_map_segmentation
Purpose
The autoware_compare_map_segmentation is a package that filters the ground points from the input pointcloud by using map info (e.g. pcd, elevation map or split map pointcloud from map_loader interface).
Inner-workings / Algorithms
Compare Elevation Map Filter
Compare the z of the input points with the value of elevation_map. The height difference is calculated by the binary integration of neighboring cells. Remove points whose height difference is below the height_diff_thresh.
Distance Based Compare Map Filter
This filter compares the input pointcloud with the map pointcloud using the nearestKSearch function of kdtree and removes points that are close to the map point cloud. The map pointcloud can be loaded statically at once at the beginning or dynamically as the vehicle moves.
Voxel Based Approximate Compare Map Filter
The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them.
Voxel Based Compare Map Filter
The filter loads the map pointcloud (static loading whole map at once at beginning or dynamic loading during vehicle moving) and utilizes VoxelGrid to downsample map pointcloud.
For each point of input pointcloud, the filter use getCentroidIndexAt combine with getGridCoordinates function from VoxelGrid class to check if the downsampled map point existing surrounding input points. Remove the input point which has downsampled map point in voxels containing or being close to the point.
Voxel Distance based Compare Map Filter
This filter is a combination of the distance_based_compare_map_filter and voxel_based_approximate_compare_map_filter. The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid and a k-d tree of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them. For points that do not belong to any voxel grid, they are compared again with the map point cloud using the radiusSearch function of the k-d tree and are removed if they are close enough to the map.
Lanelet Elevation Filter
The Lanelet Elevation Filter filters point clouds based on lanelet elevation information. It creates a grid-based elevation map from lanelet data and filters out points that deviate significantly from the expected road surface height. This filter is useful for removing floating objects, overpass structures, and other non-road elements that should not be considered for ground-level navigation.
The filter processes lanelet maps to extract elevation information at regular grid intervals and uses this information to validate incoming point cloud data. Points that are too far above or below the expected lanelet surface elevation are filtered out.
If incoming point cloud frame differs from target_frame, points will be transformed to target_frame before elevation check.
Inputs / Outputs
Compare Elevation Map Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/elevation_map |
grid_map::msg::GridMap |
elevation map |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
map_layer_name |
string | elevation map layer name | elevation |
map_frame |
float | frame_id of the map that is temporarily used before elevation_map is subscribed | map |
height_diff_thresh |
float | Remove points whose height difference is below this value [m] | 0.15 |
Lanelet Elevation Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/pointcloud |
sensor_msgs::msg::PointCloud2 |
input point cloud |
~/input/lanelet_map |
autoware_map_msgs::msg::LaneletMapBin |
lanelet map |
Output
| Name | Type | Description |
|---|---|---|
~/output/pointcloud |
sensor_msgs::msg::PointCloud2 |
filtered point cloud |
~/debug/elevation_markers |
visualization_msgs::msg::MarkerArray |
elevation grid visualization |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
grid_resolution |
double | Grid cell size in meters for elevation processing | 1.0 |
height_threshold |
double | Maximum height difference from lanelet elevation (meters) | 2.0 |
sampling_distance |
double | Distance between sampled points along lanelet boundaries (meters) | 0.5 |
extension_count |
int | Number of cells to extend around original lanelet points | 5 |
target_frame |
string | Target coordinate frame for processing | map |
cache_directory |
string | Directory for cached grid files | $(find-pkg-share autoware_compare_map_segmentation)/data/lanelet_grid_cache |
require_map_coverage |
bool | If true, only keep points with direct map coverage; reject points requiring interpolation | true |
enable_debug |
bool | Enable debug mode (includes elevation markers and processing time publisher) | false |
Other Filters
Input
File truncated at 100 lines see the full file
Changelog for package autoware_compare_map_segmentation
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat!: remove ROS 2 Galactic codes (#11905)
-
fix(compare_map_segmentation): ignore -Warray-bounds (#11929)
-
fix: qos compatibility (#11878)
-
feat(pointcloud_preprocessor): improve cloud validation (#11853)
-
feat(pointcloud_preprocessor): validate indices (#11852)
-
feat(pointcloud_preprocessor): simplify is_valid (#11851)
-
fix(autoware_compare_map_segmentation): use async service call in VoxelGridDynamicMapLoader to prevent deadlock (#11814)
* refactor(voxel_grid_map_loader): simplify async request handling Replaced blocking wait with a callback mechanism for handling map update requests. This improves responsiveness and error handling when retrieving differential pointcloud maps.
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(autoware_compare_map_segmentation): add missing launch param (#11825)
-
Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome, Taekjin LEE, badai nguyen
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
fix(autoware_compare_map_segmentation): add empty point cloud guards (#11748)
* fix(autoware_compare_map_segmentation): add empty point cloud guards Add validation to check for empty point clouds before processing to prevent undefined behavior in PCL functions and potential crashes.
- Add guard in compare_elevation_map_filter
- Add guard in distance_based_compare_map_filter
- Add guard in voxel_distance_based_compare_map_filter
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK, Yutaka Kondo
0.48.0 (2025-11-18)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(autoware_compare_map_segmentation): add lanelet elevation filter (#11289)
- feat(autoware_compare_map_segmentation): add lanelet elevation filter
* feat(autoware_compare_map_segmentation): fix default height threshold ---------
-
Contributors: Kaan Çolak, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
- Merge remote-tracking branch 'upstream/main' into tmp/TaikiYamada/bump_version_base
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/compare_elevation_map_filter.launch.xml
-
- compare_elevation_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/compare_elevation_map_filter.param.yaml]
- input [default: /input]
- input_elevation_map [default: /input/elevation_map]
- output [default: /output]
- launch/distance_based_compare_map_filter.launch.xml
-
- distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/lanelet_elevation_filter.launch.xml
-
- input_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud]
- input_lanelet_map [default: /map/vector_map]
- output_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud_lanelet_filtered]
- config_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/lanelet_elevation_filter.param.yaml]
- launch/voxel_based_approximate_compare_map_filter.launch.xml
-
- voxel_based_approximate_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_approximate_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/voxel_based_compare_map_filter.launch.xml
-
- voxel_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- pose_with_covariance [default: /localization/pose_estimator/pose_with_covariance]
- output [default: /output]
- map_loader_service [default: /map/get_differential_pointcloud_map]
- launch/voxel_distance_based_compare_map_filter.launch.xml
-
- voxel_distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
Messages
Services
Plugins
Recent questions tagged autoware_compare_map_segmentation at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Dai Nguyen
- Yoshi Ri
- Akihisa Nagata
- Taekjin Lee
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_compare_map_segmentation
Purpose
The autoware_compare_map_segmentation is a package that filters the ground points from the input pointcloud by using map info (e.g. pcd, elevation map or split map pointcloud from map_loader interface).
Inner-workings / Algorithms
Compare Elevation Map Filter
Compare the z of the input points with the value of elevation_map. The height difference is calculated by the binary integration of neighboring cells. Remove points whose height difference is below the height_diff_thresh.
Distance Based Compare Map Filter
This filter compares the input pointcloud with the map pointcloud using the nearestKSearch function of kdtree and removes points that are close to the map point cloud. The map pointcloud can be loaded statically at once at the beginning or dynamically as the vehicle moves.
Voxel Based Approximate Compare Map Filter
The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them.
Voxel Based Compare Map Filter
The filter loads the map pointcloud (static loading whole map at once at beginning or dynamic loading during vehicle moving) and utilizes VoxelGrid to downsample map pointcloud.
For each point of input pointcloud, the filter use getCentroidIndexAt combine with getGridCoordinates function from VoxelGrid class to check if the downsampled map point existing surrounding input points. Remove the input point which has downsampled map point in voxels containing or being close to the point.
Voxel Distance based Compare Map Filter
This filter is a combination of the distance_based_compare_map_filter and voxel_based_approximate_compare_map_filter. The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid and a k-d tree of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them. For points that do not belong to any voxel grid, they are compared again with the map point cloud using the radiusSearch function of the k-d tree and are removed if they are close enough to the map.
Lanelet Elevation Filter
The Lanelet Elevation Filter filters point clouds based on lanelet elevation information. It creates a grid-based elevation map from lanelet data and filters out points that deviate significantly from the expected road surface height. This filter is useful for removing floating objects, overpass structures, and other non-road elements that should not be considered for ground-level navigation.
The filter processes lanelet maps to extract elevation information at regular grid intervals and uses this information to validate incoming point cloud data. Points that are too far above or below the expected lanelet surface elevation are filtered out.
If incoming point cloud frame differs from target_frame, points will be transformed to target_frame before elevation check.
Inputs / Outputs
Compare Elevation Map Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/elevation_map |
grid_map::msg::GridMap |
elevation map |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
map_layer_name |
string | elevation map layer name | elevation |
map_frame |
float | frame_id of the map that is temporarily used before elevation_map is subscribed | map |
height_diff_thresh |
float | Remove points whose height difference is below this value [m] | 0.15 |
Lanelet Elevation Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/pointcloud |
sensor_msgs::msg::PointCloud2 |
input point cloud |
~/input/lanelet_map |
autoware_map_msgs::msg::LaneletMapBin |
lanelet map |
Output
| Name | Type | Description |
|---|---|---|
~/output/pointcloud |
sensor_msgs::msg::PointCloud2 |
filtered point cloud |
~/debug/elevation_markers |
visualization_msgs::msg::MarkerArray |
elevation grid visualization |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
grid_resolution |
double | Grid cell size in meters for elevation processing | 1.0 |
height_threshold |
double | Maximum height difference from lanelet elevation (meters) | 2.0 |
sampling_distance |
double | Distance between sampled points along lanelet boundaries (meters) | 0.5 |
extension_count |
int | Number of cells to extend around original lanelet points | 5 |
target_frame |
string | Target coordinate frame for processing | map |
cache_directory |
string | Directory for cached grid files | $(find-pkg-share autoware_compare_map_segmentation)/data/lanelet_grid_cache |
require_map_coverage |
bool | If true, only keep points with direct map coverage; reject points requiring interpolation | true |
enable_debug |
bool | Enable debug mode (includes elevation markers and processing time publisher) | false |
Other Filters
Input
File truncated at 100 lines see the full file
Changelog for package autoware_compare_map_segmentation
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat!: remove ROS 2 Galactic codes (#11905)
-
fix(compare_map_segmentation): ignore -Warray-bounds (#11929)
-
fix: qos compatibility (#11878)
-
feat(pointcloud_preprocessor): improve cloud validation (#11853)
-
feat(pointcloud_preprocessor): validate indices (#11852)
-
feat(pointcloud_preprocessor): simplify is_valid (#11851)
-
fix(autoware_compare_map_segmentation): use async service call in VoxelGridDynamicMapLoader to prevent deadlock (#11814)
* refactor(voxel_grid_map_loader): simplify async request handling Replaced blocking wait with a callback mechanism for handling map update requests. This improves responsiveness and error handling when retrieving differential pointcloud maps.
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(autoware_compare_map_segmentation): add missing launch param (#11825)
-
Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome, Taekjin LEE, badai nguyen
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
fix(autoware_compare_map_segmentation): add empty point cloud guards (#11748)
* fix(autoware_compare_map_segmentation): add empty point cloud guards Add validation to check for empty point clouds before processing to prevent undefined behavior in PCL functions and potential crashes.
- Add guard in compare_elevation_map_filter
- Add guard in distance_based_compare_map_filter
- Add guard in voxel_distance_based_compare_map_filter
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK, Yutaka Kondo
0.48.0 (2025-11-18)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(autoware_compare_map_segmentation): add lanelet elevation filter (#11289)
- feat(autoware_compare_map_segmentation): add lanelet elevation filter
* feat(autoware_compare_map_segmentation): fix default height threshold ---------
-
Contributors: Kaan Çolak, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
- Merge remote-tracking branch 'upstream/main' into tmp/TaikiYamada/bump_version_base
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/compare_elevation_map_filter.launch.xml
-
- compare_elevation_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/compare_elevation_map_filter.param.yaml]
- input [default: /input]
- input_elevation_map [default: /input/elevation_map]
- output [default: /output]
- launch/distance_based_compare_map_filter.launch.xml
-
- distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/lanelet_elevation_filter.launch.xml
-
- input_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud]
- input_lanelet_map [default: /map/vector_map]
- output_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud_lanelet_filtered]
- config_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/lanelet_elevation_filter.param.yaml]
- launch/voxel_based_approximate_compare_map_filter.launch.xml
-
- voxel_based_approximate_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_approximate_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/voxel_based_compare_map_filter.launch.xml
-
- voxel_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- pose_with_covariance [default: /localization/pose_estimator/pose_with_covariance]
- output [default: /output]
- map_loader_service [default: /map/get_differential_pointcloud_map]
- launch/voxel_distance_based_compare_map_filter.launch.xml
-
- voxel_distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
Messages
Services
Plugins
Recent questions tagged autoware_compare_map_segmentation at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Dai Nguyen
- Yoshi Ri
- Akihisa Nagata
- Taekjin Lee
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_compare_map_segmentation
Purpose
The autoware_compare_map_segmentation is a package that filters the ground points from the input pointcloud by using map info (e.g. pcd, elevation map or split map pointcloud from map_loader interface).
Inner-workings / Algorithms
Compare Elevation Map Filter
Compare the z of the input points with the value of elevation_map. The height difference is calculated by the binary integration of neighboring cells. Remove points whose height difference is below the height_diff_thresh.
Distance Based Compare Map Filter
This filter compares the input pointcloud with the map pointcloud using the nearestKSearch function of kdtree and removes points that are close to the map point cloud. The map pointcloud can be loaded statically at once at the beginning or dynamically as the vehicle moves.
Voxel Based Approximate Compare Map Filter
The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them.
Voxel Based Compare Map Filter
The filter loads the map pointcloud (static loading whole map at once at beginning or dynamic loading during vehicle moving) and utilizes VoxelGrid to downsample map pointcloud.
For each point of input pointcloud, the filter use getCentroidIndexAt combine with getGridCoordinates function from VoxelGrid class to check if the downsampled map point existing surrounding input points. Remove the input point which has downsampled map point in voxels containing or being close to the point.
Voxel Distance based Compare Map Filter
This filter is a combination of the distance_based_compare_map_filter and voxel_based_approximate_compare_map_filter. The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid and a k-d tree of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them. For points that do not belong to any voxel grid, they are compared again with the map point cloud using the radiusSearch function of the k-d tree and are removed if they are close enough to the map.
Lanelet Elevation Filter
The Lanelet Elevation Filter filters point clouds based on lanelet elevation information. It creates a grid-based elevation map from lanelet data and filters out points that deviate significantly from the expected road surface height. This filter is useful for removing floating objects, overpass structures, and other non-road elements that should not be considered for ground-level navigation.
The filter processes lanelet maps to extract elevation information at regular grid intervals and uses this information to validate incoming point cloud data. Points that are too far above or below the expected lanelet surface elevation are filtered out.
If incoming point cloud frame differs from target_frame, points will be transformed to target_frame before elevation check.
Inputs / Outputs
Compare Elevation Map Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/elevation_map |
grid_map::msg::GridMap |
elevation map |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
map_layer_name |
string | elevation map layer name | elevation |
map_frame |
float | frame_id of the map that is temporarily used before elevation_map is subscribed | map |
height_diff_thresh |
float | Remove points whose height difference is below this value [m] | 0.15 |
Lanelet Elevation Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/pointcloud |
sensor_msgs::msg::PointCloud2 |
input point cloud |
~/input/lanelet_map |
autoware_map_msgs::msg::LaneletMapBin |
lanelet map |
Output
| Name | Type | Description |
|---|---|---|
~/output/pointcloud |
sensor_msgs::msg::PointCloud2 |
filtered point cloud |
~/debug/elevation_markers |
visualization_msgs::msg::MarkerArray |
elevation grid visualization |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
grid_resolution |
double | Grid cell size in meters for elevation processing | 1.0 |
height_threshold |
double | Maximum height difference from lanelet elevation (meters) | 2.0 |
sampling_distance |
double | Distance between sampled points along lanelet boundaries (meters) | 0.5 |
extension_count |
int | Number of cells to extend around original lanelet points | 5 |
target_frame |
string | Target coordinate frame for processing | map |
cache_directory |
string | Directory for cached grid files | $(find-pkg-share autoware_compare_map_segmentation)/data/lanelet_grid_cache |
require_map_coverage |
bool | If true, only keep points with direct map coverage; reject points requiring interpolation | true |
enable_debug |
bool | Enable debug mode (includes elevation markers and processing time publisher) | false |
Other Filters
Input
File truncated at 100 lines see the full file
Changelog for package autoware_compare_map_segmentation
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat!: remove ROS 2 Galactic codes (#11905)
-
fix(compare_map_segmentation): ignore -Warray-bounds (#11929)
-
fix: qos compatibility (#11878)
-
feat(pointcloud_preprocessor): improve cloud validation (#11853)
-
feat(pointcloud_preprocessor): validate indices (#11852)
-
feat(pointcloud_preprocessor): simplify is_valid (#11851)
-
fix(autoware_compare_map_segmentation): use async service call in VoxelGridDynamicMapLoader to prevent deadlock (#11814)
* refactor(voxel_grid_map_loader): simplify async request handling Replaced blocking wait with a callback mechanism for handling map update requests. This improves responsiveness and error handling when retrieving differential pointcloud maps.
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(autoware_compare_map_segmentation): add missing launch param (#11825)
-
Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome, Taekjin LEE, badai nguyen
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
fix(autoware_compare_map_segmentation): add empty point cloud guards (#11748)
* fix(autoware_compare_map_segmentation): add empty point cloud guards Add validation to check for empty point clouds before processing to prevent undefined behavior in PCL functions and potential crashes.
- Add guard in compare_elevation_map_filter
- Add guard in distance_based_compare_map_filter
- Add guard in voxel_distance_based_compare_map_filter
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK, Yutaka Kondo
0.48.0 (2025-11-18)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(autoware_compare_map_segmentation): add lanelet elevation filter (#11289)
- feat(autoware_compare_map_segmentation): add lanelet elevation filter
* feat(autoware_compare_map_segmentation): fix default height threshold ---------
-
Contributors: Kaan Çolak, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
- Merge remote-tracking branch 'upstream/main' into tmp/TaikiYamada/bump_version_base
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/compare_elevation_map_filter.launch.xml
-
- compare_elevation_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/compare_elevation_map_filter.param.yaml]
- input [default: /input]
- input_elevation_map [default: /input/elevation_map]
- output [default: /output]
- launch/distance_based_compare_map_filter.launch.xml
-
- distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/lanelet_elevation_filter.launch.xml
-
- input_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud]
- input_lanelet_map [default: /map/vector_map]
- output_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud_lanelet_filtered]
- config_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/lanelet_elevation_filter.param.yaml]
- launch/voxel_based_approximate_compare_map_filter.launch.xml
-
- voxel_based_approximate_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_approximate_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/voxel_based_compare_map_filter.launch.xml
-
- voxel_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- pose_with_covariance [default: /localization/pose_estimator/pose_with_covariance]
- output [default: /output]
- map_loader_service [default: /map/get_differential_pointcloud_map]
- launch/voxel_distance_based_compare_map_filter.launch.xml
-
- voxel_distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
Messages
Services
Plugins
Recent questions tagged autoware_compare_map_segmentation at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Dai Nguyen
- Yoshi Ri
- Akihisa Nagata
- Taekjin Lee
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_compare_map_segmentation
Purpose
The autoware_compare_map_segmentation is a package that filters the ground points from the input pointcloud by using map info (e.g. pcd, elevation map or split map pointcloud from map_loader interface).
Inner-workings / Algorithms
Compare Elevation Map Filter
Compare the z of the input points with the value of elevation_map. The height difference is calculated by the binary integration of neighboring cells. Remove points whose height difference is below the height_diff_thresh.
Distance Based Compare Map Filter
This filter compares the input pointcloud with the map pointcloud using the nearestKSearch function of kdtree and removes points that are close to the map point cloud. The map pointcloud can be loaded statically at once at the beginning or dynamically as the vehicle moves.
Voxel Based Approximate Compare Map Filter
The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them.
Voxel Based Compare Map Filter
The filter loads the map pointcloud (static loading whole map at once at beginning or dynamic loading during vehicle moving) and utilizes VoxelGrid to downsample map pointcloud.
For each point of input pointcloud, the filter use getCentroidIndexAt combine with getGridCoordinates function from VoxelGrid class to check if the downsampled map point existing surrounding input points. Remove the input point which has downsampled map point in voxels containing or being close to the point.
Voxel Distance based Compare Map Filter
This filter is a combination of the distance_based_compare_map_filter and voxel_based_approximate_compare_map_filter. The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid and a k-d tree of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them. For points that do not belong to any voxel grid, they are compared again with the map point cloud using the radiusSearch function of the k-d tree and are removed if they are close enough to the map.
Lanelet Elevation Filter
The Lanelet Elevation Filter filters point clouds based on lanelet elevation information. It creates a grid-based elevation map from lanelet data and filters out points that deviate significantly from the expected road surface height. This filter is useful for removing floating objects, overpass structures, and other non-road elements that should not be considered for ground-level navigation.
The filter processes lanelet maps to extract elevation information at regular grid intervals and uses this information to validate incoming point cloud data. Points that are too far above or below the expected lanelet surface elevation are filtered out.
If incoming point cloud frame differs from target_frame, points will be transformed to target_frame before elevation check.
Inputs / Outputs
Compare Elevation Map Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/elevation_map |
grid_map::msg::GridMap |
elevation map |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
map_layer_name |
string | elevation map layer name | elevation |
map_frame |
float | frame_id of the map that is temporarily used before elevation_map is subscribed | map |
height_diff_thresh |
float | Remove points whose height difference is below this value [m] | 0.15 |
Lanelet Elevation Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/pointcloud |
sensor_msgs::msg::PointCloud2 |
input point cloud |
~/input/lanelet_map |
autoware_map_msgs::msg::LaneletMapBin |
lanelet map |
Output
| Name | Type | Description |
|---|---|---|
~/output/pointcloud |
sensor_msgs::msg::PointCloud2 |
filtered point cloud |
~/debug/elevation_markers |
visualization_msgs::msg::MarkerArray |
elevation grid visualization |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
grid_resolution |
double | Grid cell size in meters for elevation processing | 1.0 |
height_threshold |
double | Maximum height difference from lanelet elevation (meters) | 2.0 |
sampling_distance |
double | Distance between sampled points along lanelet boundaries (meters) | 0.5 |
extension_count |
int | Number of cells to extend around original lanelet points | 5 |
target_frame |
string | Target coordinate frame for processing | map |
cache_directory |
string | Directory for cached grid files | $(find-pkg-share autoware_compare_map_segmentation)/data/lanelet_grid_cache |
require_map_coverage |
bool | If true, only keep points with direct map coverage; reject points requiring interpolation | true |
enable_debug |
bool | Enable debug mode (includes elevation markers and processing time publisher) | false |
Other Filters
Input
File truncated at 100 lines see the full file
Changelog for package autoware_compare_map_segmentation
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat!: remove ROS 2 Galactic codes (#11905)
-
fix(compare_map_segmentation): ignore -Warray-bounds (#11929)
-
fix: qos compatibility (#11878)
-
feat(pointcloud_preprocessor): improve cloud validation (#11853)
-
feat(pointcloud_preprocessor): validate indices (#11852)
-
feat(pointcloud_preprocessor): simplify is_valid (#11851)
-
fix(autoware_compare_map_segmentation): use async service call in VoxelGridDynamicMapLoader to prevent deadlock (#11814)
* refactor(voxel_grid_map_loader): simplify async request handling Replaced blocking wait with a callback mechanism for handling map update requests. This improves responsiveness and error handling when retrieving differential pointcloud maps.
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(autoware_compare_map_segmentation): add missing launch param (#11825)
-
Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome, Taekjin LEE, badai nguyen
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
fix(autoware_compare_map_segmentation): add empty point cloud guards (#11748)
* fix(autoware_compare_map_segmentation): add empty point cloud guards Add validation to check for empty point clouds before processing to prevent undefined behavior in PCL functions and potential crashes.
- Add guard in compare_elevation_map_filter
- Add guard in distance_based_compare_map_filter
- Add guard in voxel_distance_based_compare_map_filter
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK, Yutaka Kondo
0.48.0 (2025-11-18)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(autoware_compare_map_segmentation): add lanelet elevation filter (#11289)
- feat(autoware_compare_map_segmentation): add lanelet elevation filter
* feat(autoware_compare_map_segmentation): fix default height threshold ---------
-
Contributors: Kaan Çolak, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
- Merge remote-tracking branch 'upstream/main' into tmp/TaikiYamada/bump_version_base
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/compare_elevation_map_filter.launch.xml
-
- compare_elevation_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/compare_elevation_map_filter.param.yaml]
- input [default: /input]
- input_elevation_map [default: /input/elevation_map]
- output [default: /output]
- launch/distance_based_compare_map_filter.launch.xml
-
- distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/lanelet_elevation_filter.launch.xml
-
- input_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud]
- input_lanelet_map [default: /map/vector_map]
- output_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud_lanelet_filtered]
- config_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/lanelet_elevation_filter.param.yaml]
- launch/voxel_based_approximate_compare_map_filter.launch.xml
-
- voxel_based_approximate_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_approximate_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/voxel_based_compare_map_filter.launch.xml
-
- voxel_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- pose_with_covariance [default: /localization/pose_estimator/pose_with_covariance]
- output [default: /output]
- map_loader_service [default: /map/get_differential_pointcloud_map]
- launch/voxel_distance_based_compare_map_filter.launch.xml
-
- voxel_distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
Messages
Services
Plugins
Recent questions tagged autoware_compare_map_segmentation at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Dai Nguyen
- Yoshi Ri
- Akihisa Nagata
- Taekjin Lee
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_compare_map_segmentation
Purpose
The autoware_compare_map_segmentation is a package that filters the ground points from the input pointcloud by using map info (e.g. pcd, elevation map or split map pointcloud from map_loader interface).
Inner-workings / Algorithms
Compare Elevation Map Filter
Compare the z of the input points with the value of elevation_map. The height difference is calculated by the binary integration of neighboring cells. Remove points whose height difference is below the height_diff_thresh.
Distance Based Compare Map Filter
This filter compares the input pointcloud with the map pointcloud using the nearestKSearch function of kdtree and removes points that are close to the map point cloud. The map pointcloud can be loaded statically at once at the beginning or dynamically as the vehicle moves.
Voxel Based Approximate Compare Map Filter
The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them.
Voxel Based Compare Map Filter
The filter loads the map pointcloud (static loading whole map at once at beginning or dynamic loading during vehicle moving) and utilizes VoxelGrid to downsample map pointcloud.
For each point of input pointcloud, the filter use getCentroidIndexAt combine with getGridCoordinates function from VoxelGrid class to check if the downsampled map point existing surrounding input points. Remove the input point which has downsampled map point in voxels containing or being close to the point.
Voxel Distance based Compare Map Filter
This filter is a combination of the distance_based_compare_map_filter and voxel_based_approximate_compare_map_filter. The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid and a k-d tree of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them. For points that do not belong to any voxel grid, they are compared again with the map point cloud using the radiusSearch function of the k-d tree and are removed if they are close enough to the map.
Lanelet Elevation Filter
The Lanelet Elevation Filter filters point clouds based on lanelet elevation information. It creates a grid-based elevation map from lanelet data and filters out points that deviate significantly from the expected road surface height. This filter is useful for removing floating objects, overpass structures, and other non-road elements that should not be considered for ground-level navigation.
The filter processes lanelet maps to extract elevation information at regular grid intervals and uses this information to validate incoming point cloud data. Points that are too far above or below the expected lanelet surface elevation are filtered out.
If incoming point cloud frame differs from target_frame, points will be transformed to target_frame before elevation check.
Inputs / Outputs
Compare Elevation Map Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/elevation_map |
grid_map::msg::GridMap |
elevation map |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
map_layer_name |
string | elevation map layer name | elevation |
map_frame |
float | frame_id of the map that is temporarily used before elevation_map is subscribed | map |
height_diff_thresh |
float | Remove points whose height difference is below this value [m] | 0.15 |
Lanelet Elevation Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/pointcloud |
sensor_msgs::msg::PointCloud2 |
input point cloud |
~/input/lanelet_map |
autoware_map_msgs::msg::LaneletMapBin |
lanelet map |
Output
| Name | Type | Description |
|---|---|---|
~/output/pointcloud |
sensor_msgs::msg::PointCloud2 |
filtered point cloud |
~/debug/elevation_markers |
visualization_msgs::msg::MarkerArray |
elevation grid visualization |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
grid_resolution |
double | Grid cell size in meters for elevation processing | 1.0 |
height_threshold |
double | Maximum height difference from lanelet elevation (meters) | 2.0 |
sampling_distance |
double | Distance between sampled points along lanelet boundaries (meters) | 0.5 |
extension_count |
int | Number of cells to extend around original lanelet points | 5 |
target_frame |
string | Target coordinate frame for processing | map |
cache_directory |
string | Directory for cached grid files | $(find-pkg-share autoware_compare_map_segmentation)/data/lanelet_grid_cache |
require_map_coverage |
bool | If true, only keep points with direct map coverage; reject points requiring interpolation | true |
enable_debug |
bool | Enable debug mode (includes elevation markers and processing time publisher) | false |
Other Filters
Input
File truncated at 100 lines see the full file
Changelog for package autoware_compare_map_segmentation
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat!: remove ROS 2 Galactic codes (#11905)
-
fix(compare_map_segmentation): ignore -Warray-bounds (#11929)
-
fix: qos compatibility (#11878)
-
feat(pointcloud_preprocessor): improve cloud validation (#11853)
-
feat(pointcloud_preprocessor): validate indices (#11852)
-
feat(pointcloud_preprocessor): simplify is_valid (#11851)
-
fix(autoware_compare_map_segmentation): use async service call in VoxelGridDynamicMapLoader to prevent deadlock (#11814)
* refactor(voxel_grid_map_loader): simplify async request handling Replaced blocking wait with a callback mechanism for handling map update requests. This improves responsiveness and error handling when retrieving differential pointcloud maps.
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(autoware_compare_map_segmentation): add missing launch param (#11825)
-
Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome, Taekjin LEE, badai nguyen
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
fix(autoware_compare_map_segmentation): add empty point cloud guards (#11748)
* fix(autoware_compare_map_segmentation): add empty point cloud guards Add validation to check for empty point clouds before processing to prevent undefined behavior in PCL functions and potential crashes.
- Add guard in compare_elevation_map_filter
- Add guard in distance_based_compare_map_filter
- Add guard in voxel_distance_based_compare_map_filter
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK, Yutaka Kondo
0.48.0 (2025-11-18)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(autoware_compare_map_segmentation): add lanelet elevation filter (#11289)
- feat(autoware_compare_map_segmentation): add lanelet elevation filter
* feat(autoware_compare_map_segmentation): fix default height threshold ---------
-
Contributors: Kaan Çolak, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
- Merge remote-tracking branch 'upstream/main' into tmp/TaikiYamada/bump_version_base
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/compare_elevation_map_filter.launch.xml
-
- compare_elevation_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/compare_elevation_map_filter.param.yaml]
- input [default: /input]
- input_elevation_map [default: /input/elevation_map]
- output [default: /output]
- launch/distance_based_compare_map_filter.launch.xml
-
- distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/lanelet_elevation_filter.launch.xml
-
- input_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud]
- input_lanelet_map [default: /map/vector_map]
- output_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud_lanelet_filtered]
- config_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/lanelet_elevation_filter.param.yaml]
- launch/voxel_based_approximate_compare_map_filter.launch.xml
-
- voxel_based_approximate_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_approximate_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/voxel_based_compare_map_filter.launch.xml
-
- voxel_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- pose_with_covariance [default: /localization/pose_estimator/pose_with_covariance]
- output [default: /output]
- map_loader_service [default: /map/get_differential_pointcloud_map]
- launch/voxel_distance_based_compare_map_filter.launch.xml
-
- voxel_distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
Messages
Services
Plugins
Recent questions tagged autoware_compare_map_segmentation at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Dai Nguyen
- Yoshi Ri
- Akihisa Nagata
- Taekjin Lee
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_compare_map_segmentation
Purpose
The autoware_compare_map_segmentation is a package that filters the ground points from the input pointcloud by using map info (e.g. pcd, elevation map or split map pointcloud from map_loader interface).
Inner-workings / Algorithms
Compare Elevation Map Filter
Compare the z of the input points with the value of elevation_map. The height difference is calculated by the binary integration of neighboring cells. Remove points whose height difference is below the height_diff_thresh.
Distance Based Compare Map Filter
This filter compares the input pointcloud with the map pointcloud using the nearestKSearch function of kdtree and removes points that are close to the map point cloud. The map pointcloud can be loaded statically at once at the beginning or dynamically as the vehicle moves.
Voxel Based Approximate Compare Map Filter
The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them.
Voxel Based Compare Map Filter
The filter loads the map pointcloud (static loading whole map at once at beginning or dynamic loading during vehicle moving) and utilizes VoxelGrid to downsample map pointcloud.
For each point of input pointcloud, the filter use getCentroidIndexAt combine with getGridCoordinates function from VoxelGrid class to check if the downsampled map point existing surrounding input points. Remove the input point which has downsampled map point in voxels containing or being close to the point.
Voxel Distance based Compare Map Filter
This filter is a combination of the distance_based_compare_map_filter and voxel_based_approximate_compare_map_filter. The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid and a k-d tree of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them. For points that do not belong to any voxel grid, they are compared again with the map point cloud using the radiusSearch function of the k-d tree and are removed if they are close enough to the map.
Lanelet Elevation Filter
The Lanelet Elevation Filter filters point clouds based on lanelet elevation information. It creates a grid-based elevation map from lanelet data and filters out points that deviate significantly from the expected road surface height. This filter is useful for removing floating objects, overpass structures, and other non-road elements that should not be considered for ground-level navigation.
The filter processes lanelet maps to extract elevation information at regular grid intervals and uses this information to validate incoming point cloud data. Points that are too far above or below the expected lanelet surface elevation are filtered out.
If incoming point cloud frame differs from target_frame, points will be transformed to target_frame before elevation check.
Inputs / Outputs
Compare Elevation Map Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/elevation_map |
grid_map::msg::GridMap |
elevation map |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
map_layer_name |
string | elevation map layer name | elevation |
map_frame |
float | frame_id of the map that is temporarily used before elevation_map is subscribed | map |
height_diff_thresh |
float | Remove points whose height difference is below this value [m] | 0.15 |
Lanelet Elevation Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/pointcloud |
sensor_msgs::msg::PointCloud2 |
input point cloud |
~/input/lanelet_map |
autoware_map_msgs::msg::LaneletMapBin |
lanelet map |
Output
| Name | Type | Description |
|---|---|---|
~/output/pointcloud |
sensor_msgs::msg::PointCloud2 |
filtered point cloud |
~/debug/elevation_markers |
visualization_msgs::msg::MarkerArray |
elevation grid visualization |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
grid_resolution |
double | Grid cell size in meters for elevation processing | 1.0 |
height_threshold |
double | Maximum height difference from lanelet elevation (meters) | 2.0 |
sampling_distance |
double | Distance between sampled points along lanelet boundaries (meters) | 0.5 |
extension_count |
int | Number of cells to extend around original lanelet points | 5 |
target_frame |
string | Target coordinate frame for processing | map |
cache_directory |
string | Directory for cached grid files | $(find-pkg-share autoware_compare_map_segmentation)/data/lanelet_grid_cache |
require_map_coverage |
bool | If true, only keep points with direct map coverage; reject points requiring interpolation | true |
enable_debug |
bool | Enable debug mode (includes elevation markers and processing time publisher) | false |
Other Filters
Input
File truncated at 100 lines see the full file
Changelog for package autoware_compare_map_segmentation
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat!: remove ROS 2 Galactic codes (#11905)
-
fix(compare_map_segmentation): ignore -Warray-bounds (#11929)
-
fix: qos compatibility (#11878)
-
feat(pointcloud_preprocessor): improve cloud validation (#11853)
-
feat(pointcloud_preprocessor): validate indices (#11852)
-
feat(pointcloud_preprocessor): simplify is_valid (#11851)
-
fix(autoware_compare_map_segmentation): use async service call in VoxelGridDynamicMapLoader to prevent deadlock (#11814)
* refactor(voxel_grid_map_loader): simplify async request handling Replaced blocking wait with a callback mechanism for handling map update requests. This improves responsiveness and error handling when retrieving differential pointcloud maps.
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(autoware_compare_map_segmentation): add missing launch param (#11825)
-
Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome, Taekjin LEE, badai nguyen
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
fix(autoware_compare_map_segmentation): add empty point cloud guards (#11748)
* fix(autoware_compare_map_segmentation): add empty point cloud guards Add validation to check for empty point clouds before processing to prevent undefined behavior in PCL functions and potential crashes.
- Add guard in compare_elevation_map_filter
- Add guard in distance_based_compare_map_filter
- Add guard in voxel_distance_based_compare_map_filter
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK, Yutaka Kondo
0.48.0 (2025-11-18)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(autoware_compare_map_segmentation): add lanelet elevation filter (#11289)
- feat(autoware_compare_map_segmentation): add lanelet elevation filter
* feat(autoware_compare_map_segmentation): fix default height threshold ---------
-
Contributors: Kaan Çolak, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
- Merge remote-tracking branch 'upstream/main' into tmp/TaikiYamada/bump_version_base
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/compare_elevation_map_filter.launch.xml
-
- compare_elevation_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/compare_elevation_map_filter.param.yaml]
- input [default: /input]
- input_elevation_map [default: /input/elevation_map]
- output [default: /output]
- launch/distance_based_compare_map_filter.launch.xml
-
- distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/lanelet_elevation_filter.launch.xml
-
- input_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud]
- input_lanelet_map [default: /map/vector_map]
- output_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud_lanelet_filtered]
- config_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/lanelet_elevation_filter.param.yaml]
- launch/voxel_based_approximate_compare_map_filter.launch.xml
-
- voxel_based_approximate_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_approximate_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/voxel_based_compare_map_filter.launch.xml
-
- voxel_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- pose_with_covariance [default: /localization/pose_estimator/pose_with_covariance]
- output [default: /output]
- map_loader_service [default: /map/get_differential_pointcloud_map]
- launch/voxel_distance_based_compare_map_filter.launch.xml
-
- voxel_distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
Messages
Services
Plugins
Recent questions tagged autoware_compare_map_segmentation at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Dai Nguyen
- Yoshi Ri
- Akihisa Nagata
- Taekjin Lee
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_compare_map_segmentation
Purpose
The autoware_compare_map_segmentation is a package that filters the ground points from the input pointcloud by using map info (e.g. pcd, elevation map or split map pointcloud from map_loader interface).
Inner-workings / Algorithms
Compare Elevation Map Filter
Compare the z of the input points with the value of elevation_map. The height difference is calculated by the binary integration of neighboring cells. Remove points whose height difference is below the height_diff_thresh.
Distance Based Compare Map Filter
This filter compares the input pointcloud with the map pointcloud using the nearestKSearch function of kdtree and removes points that are close to the map point cloud. The map pointcloud can be loaded statically at once at the beginning or dynamically as the vehicle moves.
Voxel Based Approximate Compare Map Filter
The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them.
Voxel Based Compare Map Filter
The filter loads the map pointcloud (static loading whole map at once at beginning or dynamic loading during vehicle moving) and utilizes VoxelGrid to downsample map pointcloud.
For each point of input pointcloud, the filter use getCentroidIndexAt combine with getGridCoordinates function from VoxelGrid class to check if the downsampled map point existing surrounding input points. Remove the input point which has downsampled map point in voxels containing or being close to the point.
Voxel Distance based Compare Map Filter
This filter is a combination of the distance_based_compare_map_filter and voxel_based_approximate_compare_map_filter. The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid and a k-d tree of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them. For points that do not belong to any voxel grid, they are compared again with the map point cloud using the radiusSearch function of the k-d tree and are removed if they are close enough to the map.
Lanelet Elevation Filter
The Lanelet Elevation Filter filters point clouds based on lanelet elevation information. It creates a grid-based elevation map from lanelet data and filters out points that deviate significantly from the expected road surface height. This filter is useful for removing floating objects, overpass structures, and other non-road elements that should not be considered for ground-level navigation.
The filter processes lanelet maps to extract elevation information at regular grid intervals and uses this information to validate incoming point cloud data. Points that are too far above or below the expected lanelet surface elevation are filtered out.
If incoming point cloud frame differs from target_frame, points will be transformed to target_frame before elevation check.
Inputs / Outputs
Compare Elevation Map Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/elevation_map |
grid_map::msg::GridMap |
elevation map |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
map_layer_name |
string | elevation map layer name | elevation |
map_frame |
float | frame_id of the map that is temporarily used before elevation_map is subscribed | map |
height_diff_thresh |
float | Remove points whose height difference is below this value [m] | 0.15 |
Lanelet Elevation Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/pointcloud |
sensor_msgs::msg::PointCloud2 |
input point cloud |
~/input/lanelet_map |
autoware_map_msgs::msg::LaneletMapBin |
lanelet map |
Output
| Name | Type | Description |
|---|---|---|
~/output/pointcloud |
sensor_msgs::msg::PointCloud2 |
filtered point cloud |
~/debug/elevation_markers |
visualization_msgs::msg::MarkerArray |
elevation grid visualization |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
grid_resolution |
double | Grid cell size in meters for elevation processing | 1.0 |
height_threshold |
double | Maximum height difference from lanelet elevation (meters) | 2.0 |
sampling_distance |
double | Distance between sampled points along lanelet boundaries (meters) | 0.5 |
extension_count |
int | Number of cells to extend around original lanelet points | 5 |
target_frame |
string | Target coordinate frame for processing | map |
cache_directory |
string | Directory for cached grid files | $(find-pkg-share autoware_compare_map_segmentation)/data/lanelet_grid_cache |
require_map_coverage |
bool | If true, only keep points with direct map coverage; reject points requiring interpolation | true |
enable_debug |
bool | Enable debug mode (includes elevation markers and processing time publisher) | false |
Other Filters
Input
File truncated at 100 lines see the full file
Changelog for package autoware_compare_map_segmentation
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat!: remove ROS 2 Galactic codes (#11905)
-
fix(compare_map_segmentation): ignore -Warray-bounds (#11929)
-
fix: qos compatibility (#11878)
-
feat(pointcloud_preprocessor): improve cloud validation (#11853)
-
feat(pointcloud_preprocessor): validate indices (#11852)
-
feat(pointcloud_preprocessor): simplify is_valid (#11851)
-
fix(autoware_compare_map_segmentation): use async service call in VoxelGridDynamicMapLoader to prevent deadlock (#11814)
* refactor(voxel_grid_map_loader): simplify async request handling Replaced blocking wait with a callback mechanism for handling map update requests. This improves responsiveness and error handling when retrieving differential pointcloud maps.
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(autoware_compare_map_segmentation): add missing launch param (#11825)
-
Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome, Taekjin LEE, badai nguyen
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
fix(autoware_compare_map_segmentation): add empty point cloud guards (#11748)
* fix(autoware_compare_map_segmentation): add empty point cloud guards Add validation to check for empty point clouds before processing to prevent undefined behavior in PCL functions and potential crashes.
- Add guard in compare_elevation_map_filter
- Add guard in distance_based_compare_map_filter
- Add guard in voxel_distance_based_compare_map_filter
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK, Yutaka Kondo
0.48.0 (2025-11-18)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(autoware_compare_map_segmentation): add lanelet elevation filter (#11289)
- feat(autoware_compare_map_segmentation): add lanelet elevation filter
* feat(autoware_compare_map_segmentation): fix default height threshold ---------
-
Contributors: Kaan Çolak, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
- Merge remote-tracking branch 'upstream/main' into tmp/TaikiYamada/bump_version_base
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/compare_elevation_map_filter.launch.xml
-
- compare_elevation_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/compare_elevation_map_filter.param.yaml]
- input [default: /input]
- input_elevation_map [default: /input/elevation_map]
- output [default: /output]
- launch/distance_based_compare_map_filter.launch.xml
-
- distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/lanelet_elevation_filter.launch.xml
-
- input_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud]
- input_lanelet_map [default: /map/vector_map]
- output_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud_lanelet_filtered]
- config_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/lanelet_elevation_filter.param.yaml]
- launch/voxel_based_approximate_compare_map_filter.launch.xml
-
- voxel_based_approximate_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_approximate_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/voxel_based_compare_map_filter.launch.xml
-
- voxel_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- pose_with_covariance [default: /localization/pose_estimator/pose_with_covariance]
- output [default: /output]
- map_loader_service [default: /map/get_differential_pointcloud_map]
- launch/voxel_distance_based_compare_map_filter.launch.xml
-
- voxel_distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
Messages
Services
Plugins
Recent questions tagged autoware_compare_map_segmentation at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Dai Nguyen
- Yoshi Ri
- Akihisa Nagata
- Taekjin Lee
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_compare_map_segmentation
Purpose
The autoware_compare_map_segmentation is a package that filters the ground points from the input pointcloud by using map info (e.g. pcd, elevation map or split map pointcloud from map_loader interface).
Inner-workings / Algorithms
Compare Elevation Map Filter
Compare the z of the input points with the value of elevation_map. The height difference is calculated by the binary integration of neighboring cells. Remove points whose height difference is below the height_diff_thresh.
Distance Based Compare Map Filter
This filter compares the input pointcloud with the map pointcloud using the nearestKSearch function of kdtree and removes points that are close to the map point cloud. The map pointcloud can be loaded statically at once at the beginning or dynamically as the vehicle moves.
Voxel Based Approximate Compare Map Filter
The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them.
Voxel Based Compare Map Filter
The filter loads the map pointcloud (static loading whole map at once at beginning or dynamic loading during vehicle moving) and utilizes VoxelGrid to downsample map pointcloud.
For each point of input pointcloud, the filter use getCentroidIndexAt combine with getGridCoordinates function from VoxelGrid class to check if the downsampled map point existing surrounding input points. Remove the input point which has downsampled map point in voxels containing or being close to the point.
Voxel Distance based Compare Map Filter
This filter is a combination of the distance_based_compare_map_filter and voxel_based_approximate_compare_map_filter. The filter loads the map point cloud, which can be loaded statically at the beginning or dynamically during vehicle movement, and creates a voxel grid and a k-d tree of the map point cloud. The filter uses the getCentroidIndexAt function in combination with the getGridCoordinates function from the VoxelGrid class to find input points that are inside the voxel grid and removes them. For points that do not belong to any voxel grid, they are compared again with the map point cloud using the radiusSearch function of the k-d tree and are removed if they are close enough to the map.
Lanelet Elevation Filter
The Lanelet Elevation Filter filters point clouds based on lanelet elevation information. It creates a grid-based elevation map from lanelet data and filters out points that deviate significantly from the expected road surface height. This filter is useful for removing floating objects, overpass structures, and other non-road elements that should not be considered for ground-level navigation.
The filter processes lanelet maps to extract elevation information at regular grid intervals and uses this information to validate incoming point cloud data. Points that are too far above or below the expected lanelet surface elevation are filtered out.
If incoming point cloud frame differs from target_frame, points will be transformed to target_frame before elevation check.
Inputs / Outputs
Compare Elevation Map Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/elevation_map |
grid_map::msg::GridMap |
elevation map |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
map_layer_name |
string | elevation map layer name | elevation |
map_frame |
float | frame_id of the map that is temporarily used before elevation_map is subscribed | map |
height_diff_thresh |
float | Remove points whose height difference is below this value [m] | 0.15 |
Lanelet Elevation Filter
Input
| Name | Type | Description |
|---|---|---|
~/input/pointcloud |
sensor_msgs::msg::PointCloud2 |
input point cloud |
~/input/lanelet_map |
autoware_map_msgs::msg::LaneletMapBin |
lanelet map |
Output
| Name | Type | Description |
|---|---|---|
~/output/pointcloud |
sensor_msgs::msg::PointCloud2 |
filtered point cloud |
~/debug/elevation_markers |
visualization_msgs::msg::MarkerArray |
elevation grid visualization |
Parameters
| Name | Type | Description | Default value |
|---|---|---|---|
grid_resolution |
double | Grid cell size in meters for elevation processing | 1.0 |
height_threshold |
double | Maximum height difference from lanelet elevation (meters) | 2.0 |
sampling_distance |
double | Distance between sampled points along lanelet boundaries (meters) | 0.5 |
extension_count |
int | Number of cells to extend around original lanelet points | 5 |
target_frame |
string | Target coordinate frame for processing | map |
cache_directory |
string | Directory for cached grid files | $(find-pkg-share autoware_compare_map_segmentation)/data/lanelet_grid_cache |
require_map_coverage |
bool | If true, only keep points with direct map coverage; reject points requiring interpolation | true |
enable_debug |
bool | Enable debug mode (includes elevation markers and processing time publisher) | false |
Other Filters
Input
File truncated at 100 lines see the full file
Changelog for package autoware_compare_map_segmentation
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat!: remove ROS 2 Galactic codes (#11905)
-
fix(compare_map_segmentation): ignore -Warray-bounds (#11929)
-
fix: qos compatibility (#11878)
-
feat(pointcloud_preprocessor): improve cloud validation (#11853)
-
feat(pointcloud_preprocessor): validate indices (#11852)
-
feat(pointcloud_preprocessor): simplify is_valid (#11851)
-
fix(autoware_compare_map_segmentation): use async service call in VoxelGridDynamicMapLoader to prevent deadlock (#11814)
* refactor(voxel_grid_map_loader): simplify async request handling Replaced blocking wait with a callback mechanism for handling map update requests. This improves responsiveness and error handling when retrieving differential pointcloud maps.
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(autoware_compare_map_segmentation): add missing launch param (#11825)
-
Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome, Taekjin LEE, badai nguyen
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
fix(autoware_compare_map_segmentation): add empty point cloud guards (#11748)
* fix(autoware_compare_map_segmentation): add empty point cloud guards Add validation to check for empty point clouds before processing to prevent undefined behavior in PCL functions and potential crashes.
- Add guard in compare_elevation_map_filter
- Add guard in distance_based_compare_map_filter
- Add guard in voxel_distance_based_compare_map_filter
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK, Yutaka Kondo
0.48.0 (2025-11-18)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(autoware_compare_map_segmentation): add lanelet elevation filter (#11289)
- feat(autoware_compare_map_segmentation): add lanelet elevation filter
* feat(autoware_compare_map_segmentation): fix default height threshold ---------
-
Contributors: Kaan Çolak, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
- Merge remote-tracking branch 'upstream/main' into tmp/TaikiYamada/bump_version_base
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/compare_elevation_map_filter.launch.xml
-
- compare_elevation_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/compare_elevation_map_filter.param.yaml]
- input [default: /input]
- input_elevation_map [default: /input/elevation_map]
- output [default: /output]
- launch/distance_based_compare_map_filter.launch.xml
-
- distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/lanelet_elevation_filter.launch.xml
-
- input_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud]
- input_lanelet_map [default: /map/vector_map]
- output_pointcloud [default: /perception/object_recognition/detection/pointcloud_map_filtered/pointcloud_lanelet_filtered]
- config_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/lanelet_elevation_filter.param.yaml]
- launch/voxel_based_approximate_compare_map_filter.launch.xml
-
- voxel_based_approximate_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_approximate_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]
- launch/voxel_based_compare_map_filter.launch.xml
-
- voxel_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- pose_with_covariance [default: /localization/pose_estimator/pose_with_covariance]
- output [default: /output]
- map_loader_service [default: /map/get_differential_pointcloud_map]
- launch/voxel_distance_based_compare_map_filter.launch.xml
-
- voxel_distance_based_compare_map_filter_param_file [default: $(find-pkg-share autoware_compare_map_segmentation)/config/voxel_distance_based_compare_map_filter.param.yaml]
- input [default: /input]
- input_map [default: /map]
- output [default: /output]