
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_launch.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taekjin Lee
- Maxime CLEMENT
- Max Schmeller
Authors
autoware_sample_designs
autoware_sample_designs is a complete, working example of defining and launching a full Autoware system using Autoware System Designer.
It serves as the reference implementation for how to describe, configure, and deploy an Autoware autonomous driving stack using YAML-based system design — without writing ROS 2 launch files by hand.
What is Autoware System Designer?
Autoware System Designer is a toolset that lets you describe your entire software system in structured YAML files and automatically generates correct-by-construction ROS 2 launch files, parameter templates, and system visualization diagrams from them.
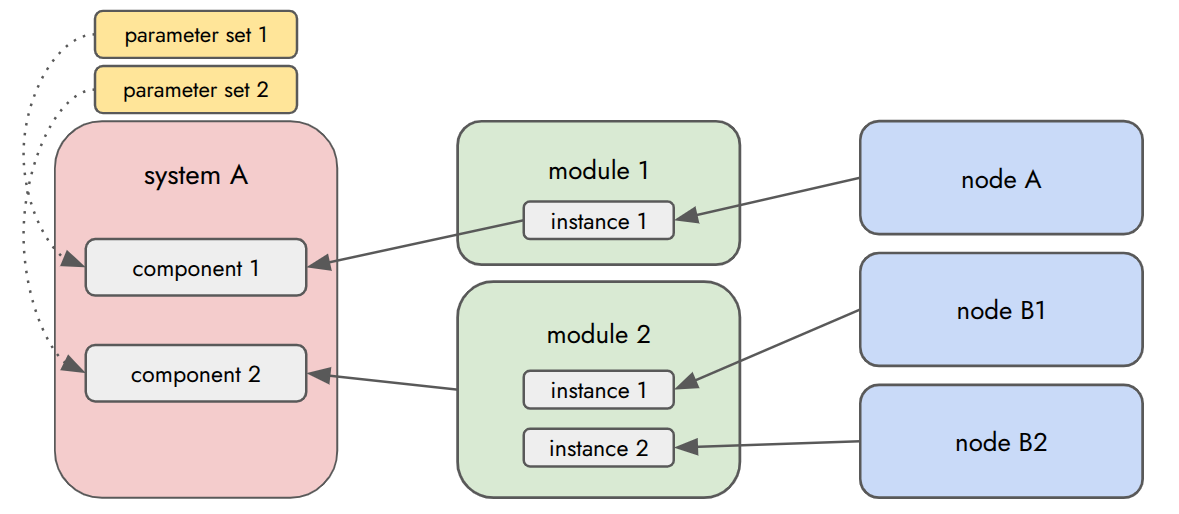
A system is composed of four entity types:
| Entity | File | Description |
|---|---|---|
| Node | *.node.yaml |
A single ROS 2 node — its topics, parameters, and execution config |
| Module | *.module.yaml |
A reusable group of nodes/sub-modules with wired connections |
| System | *.system.yaml |
The top-level description: components, connections, modes |
| Parameter Set | *.parameter_set.yaml |
Parameter overrides applied to nodes at deployment time |
The build step collects node definitions from across the workspace (resolved via workspace.yaml), combines them with the system design files in this package, and generates launch files and a system visualization:
each ROS 2 package (core, universe, …) ┐
└── design/node/ *.node.yaml │
├── autoware_system_designer
this package │
├── design/node/ *.node.yaml (optional) │
├── design/module/ *.module.yaml │
├── design/system/ *.system.yaml │
└── design/parameter_set/ *.parameter_set.yaml ┘
│
▼
install/
├── systems.html
├── AutowareSample/
│ ├── Runtime.launch.xml
│ ├── LoggingSimulation.launch.xml
│ └── PlanningSimulation.launch.xml
└── ...node launchers...
The generated node diagram shows the full system topology including all modules, nodes, and topic connections:
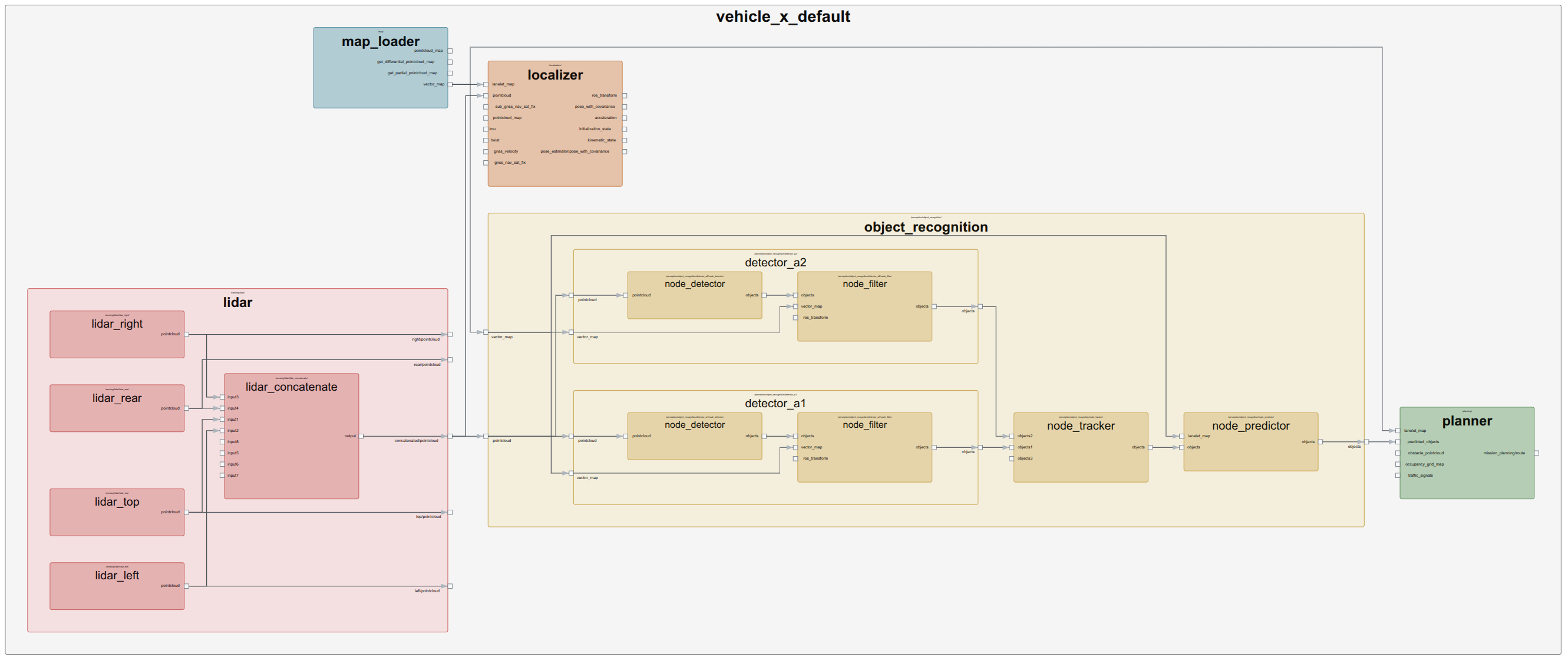
Visualizing the System
After building, open the generated HTML page in your browser to interactively explore the full system graph:
# From your colcon workspace root
firefox install/systems.html
# or
google-chrome install/systems.html
The visualization page shows every node, module, topic connection, and operating mode defined in the system.
Package Structure
autoware_sample_designs/
├── design/
│ ├── node/ # System-specific node definitions (wrapper/optional nodes only)
│ ├── module/ # Reusable subsystem modules (sensing, perception, …)
│ ├── system/
│ │ └── AutowareSample.system.yaml # Top-level system definition
│ └── parameter_set/ # Parameter overrides per node, per mode
├── config/ # Shared parameter YAML files (owned by this package)
├── launch/ # Hand-written wrapper launch files for legacy integration
├── urdf/ # Vehicle URDF
├── workspace.yaml # Provider resolution rules for the system designer
└── CMakeLists.txt
The AutowareSample.system.yaml defines four operating modes — Runtime, LoggingSimulation, PlanningSimulation, and E2ESimulation — each with mode-specific component overrides and connections.
Relationship with autoware_launch
autoware_sample_designs is independent of autoware_launch as a system builder.
The system designer generates its own launch files and manages its own system topology.
autoware_launch does not control how this system is structured or launched.
The only connection is that some parameter set files reference shared parameter YAML files from autoware_launch (e.g., tracker, fusion, and filter configs that are common across vehicle variants):
# design/parameter_set/sample_system_perception.parameter_set.yaml
parameters:
- node: /perception/object_recognition/detection/clustering/...
param_files:
# shared param file from autoware_launch — values only, no launch dependency
- param_path: $(find-pkg-share autoware_launch)/config/perception/...
This is a runtime parameter file lookup — autoware_launch is not involved in building or launching the system. Node-specific parameters that belong to this vehicle configuration live in config/ inside this package itself.
Building
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| sample_sensor_kit_description | |
| sample_sensor_kit_launch | |
| sample_vehicle_description | |
| autoware_system_designer |
System Dependencies
Dependant Packages
Launch files
- launch/sample_system_adapi_wrapper.launch.xml
-
- default_adapi_param_path [default: $(find-pkg-share autoware_default_adapi_universe)/config/default_adapi.param.yaml]
- launch/sample_system_sensing_wrapper.launch.xml
-
- launch_driver [default: true]
- vehicle_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_info.param.yaml]
- vehicle_mirror_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_mirror.param.yaml]
- pointcloud_container_name [default: pointcloud_container]
Messages
Services
Plugins
Recent questions tagged autoware_sample_designs at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_launch.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taekjin Lee
- Maxime CLEMENT
- Max Schmeller
Authors
autoware_sample_designs
autoware_sample_designs is a complete, working example of defining and launching a full Autoware system using Autoware System Designer.
It serves as the reference implementation for how to describe, configure, and deploy an Autoware autonomous driving stack using YAML-based system design — without writing ROS 2 launch files by hand.
What is Autoware System Designer?
Autoware System Designer is a toolset that lets you describe your entire software system in structured YAML files and automatically generates correct-by-construction ROS 2 launch files, parameter templates, and system visualization diagrams from them.
A system is composed of four entity types:
| Entity | File | Description |
|---|---|---|
| Node | *.node.yaml |
A single ROS 2 node — its topics, parameters, and execution config |
| Module | *.module.yaml |
A reusable group of nodes/sub-modules with wired connections |
| System | *.system.yaml |
The top-level description: components, connections, modes |
| Parameter Set | *.parameter_set.yaml |
Parameter overrides applied to nodes at deployment time |
The build step collects node definitions from across the workspace (resolved via workspace.yaml), combines them with the system design files in this package, and generates launch files and a system visualization:
each ROS 2 package (core, universe, …) ┐
└── design/node/ *.node.yaml │
├── autoware_system_designer
this package │
├── design/node/ *.node.yaml (optional) │
├── design/module/ *.module.yaml │
├── design/system/ *.system.yaml │
└── design/parameter_set/ *.parameter_set.yaml ┘
│
▼
install/
├── systems.html
├── AutowareSample/
│ ├── Runtime.launch.xml
│ ├── LoggingSimulation.launch.xml
│ └── PlanningSimulation.launch.xml
└── ...node launchers...
The generated node diagram shows the full system topology including all modules, nodes, and topic connections:
Visualizing the System
After building, open the generated HTML page in your browser to interactively explore the full system graph:
# From your colcon workspace root
firefox install/systems.html
# or
google-chrome install/systems.html
The visualization page shows every node, module, topic connection, and operating mode defined in the system.
Package Structure
autoware_sample_designs/
├── design/
│ ├── node/ # System-specific node definitions (wrapper/optional nodes only)
│ ├── module/ # Reusable subsystem modules (sensing, perception, …)
│ ├── system/
│ │ └── AutowareSample.system.yaml # Top-level system definition
│ └── parameter_set/ # Parameter overrides per node, per mode
├── config/ # Shared parameter YAML files (owned by this package)
├── launch/ # Hand-written wrapper launch files for legacy integration
├── urdf/ # Vehicle URDF
├── workspace.yaml # Provider resolution rules for the system designer
└── CMakeLists.txt
The AutowareSample.system.yaml defines four operating modes — Runtime, LoggingSimulation, PlanningSimulation, and E2ESimulation — each with mode-specific component overrides and connections.
Relationship with autoware_launch
autoware_sample_designs is independent of autoware_launch as a system builder.
The system designer generates its own launch files and manages its own system topology.
autoware_launch does not control how this system is structured or launched.
The only connection is that some parameter set files reference shared parameter YAML files from autoware_launch (e.g., tracker, fusion, and filter configs that are common across vehicle variants):
# design/parameter_set/sample_system_perception.parameter_set.yaml
parameters:
- node: /perception/object_recognition/detection/clustering/...
param_files:
# shared param file from autoware_launch — values only, no launch dependency
- param_path: $(find-pkg-share autoware_launch)/config/perception/...
This is a runtime parameter file lookup — autoware_launch is not involved in building or launching the system. Node-specific parameters that belong to this vehicle configuration live in config/ inside this package itself.
Building
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| sample_sensor_kit_description | |
| sample_sensor_kit_launch | |
| sample_vehicle_description | |
| autoware_system_designer |
System Dependencies
Dependant Packages
Launch files
- launch/sample_system_adapi_wrapper.launch.xml
-
- default_adapi_param_path [default: $(find-pkg-share autoware_default_adapi_universe)/config/default_adapi.param.yaml]
- launch/sample_system_sensing_wrapper.launch.xml
-
- launch_driver [default: true]
- vehicle_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_info.param.yaml]
- vehicle_mirror_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_mirror.param.yaml]
- pointcloud_container_name [default: pointcloud_container]
Messages
Services
Plugins
Recent questions tagged autoware_sample_designs at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_launch.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taekjin Lee
- Maxime CLEMENT
- Max Schmeller
Authors
autoware_sample_designs
autoware_sample_designs is a complete, working example of defining and launching a full Autoware system using Autoware System Designer.
It serves as the reference implementation for how to describe, configure, and deploy an Autoware autonomous driving stack using YAML-based system design — without writing ROS 2 launch files by hand.
What is Autoware System Designer?
Autoware System Designer is a toolset that lets you describe your entire software system in structured YAML files and automatically generates correct-by-construction ROS 2 launch files, parameter templates, and system visualization diagrams from them.
A system is composed of four entity types:
| Entity | File | Description |
|---|---|---|
| Node | *.node.yaml |
A single ROS 2 node — its topics, parameters, and execution config |
| Module | *.module.yaml |
A reusable group of nodes/sub-modules with wired connections |
| System | *.system.yaml |
The top-level description: components, connections, modes |
| Parameter Set | *.parameter_set.yaml |
Parameter overrides applied to nodes at deployment time |
The build step collects node definitions from across the workspace (resolved via workspace.yaml), combines them with the system design files in this package, and generates launch files and a system visualization:
each ROS 2 package (core, universe, …) ┐
└── design/node/ *.node.yaml │
├── autoware_system_designer
this package │
├── design/node/ *.node.yaml (optional) │
├── design/module/ *.module.yaml │
├── design/system/ *.system.yaml │
└── design/parameter_set/ *.parameter_set.yaml ┘
│
▼
install/
├── systems.html
├── AutowareSample/
│ ├── Runtime.launch.xml
│ ├── LoggingSimulation.launch.xml
│ └── PlanningSimulation.launch.xml
└── ...node launchers...
The generated node diagram shows the full system topology including all modules, nodes, and topic connections:
Visualizing the System
After building, open the generated HTML page in your browser to interactively explore the full system graph:
# From your colcon workspace root
firefox install/systems.html
# or
google-chrome install/systems.html
The visualization page shows every node, module, topic connection, and operating mode defined in the system.
Package Structure
autoware_sample_designs/
├── design/
│ ├── node/ # System-specific node definitions (wrapper/optional nodes only)
│ ├── module/ # Reusable subsystem modules (sensing, perception, …)
│ ├── system/
│ │ └── AutowareSample.system.yaml # Top-level system definition
│ └── parameter_set/ # Parameter overrides per node, per mode
├── config/ # Shared parameter YAML files (owned by this package)
├── launch/ # Hand-written wrapper launch files for legacy integration
├── urdf/ # Vehicle URDF
├── workspace.yaml # Provider resolution rules for the system designer
└── CMakeLists.txt
The AutowareSample.system.yaml defines four operating modes — Runtime, LoggingSimulation, PlanningSimulation, and E2ESimulation — each with mode-specific component overrides and connections.
Relationship with autoware_launch
autoware_sample_designs is independent of autoware_launch as a system builder.
The system designer generates its own launch files and manages its own system topology.
autoware_launch does not control how this system is structured or launched.
The only connection is that some parameter set files reference shared parameter YAML files from autoware_launch (e.g., tracker, fusion, and filter configs that are common across vehicle variants):
# design/parameter_set/sample_system_perception.parameter_set.yaml
parameters:
- node: /perception/object_recognition/detection/clustering/...
param_files:
# shared param file from autoware_launch — values only, no launch dependency
- param_path: $(find-pkg-share autoware_launch)/config/perception/...
This is a runtime parameter file lookup — autoware_launch is not involved in building or launching the system. Node-specific parameters that belong to this vehicle configuration live in config/ inside this package itself.
Building
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| sample_sensor_kit_description | |
| sample_sensor_kit_launch | |
| sample_vehicle_description | |
| autoware_system_designer |
System Dependencies
Dependant Packages
Launch files
- launch/sample_system_adapi_wrapper.launch.xml
-
- default_adapi_param_path [default: $(find-pkg-share autoware_default_adapi_universe)/config/default_adapi.param.yaml]
- launch/sample_system_sensing_wrapper.launch.xml
-
- launch_driver [default: true]
- vehicle_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_info.param.yaml]
- vehicle_mirror_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_mirror.param.yaml]
- pointcloud_container_name [default: pointcloud_container]
Messages
Services
Plugins
Recent questions tagged autoware_sample_designs at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_launch.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taekjin Lee
- Maxime CLEMENT
- Max Schmeller
Authors
autoware_sample_designs
autoware_sample_designs is a complete, working example of defining and launching a full Autoware system using Autoware System Designer.
It serves as the reference implementation for how to describe, configure, and deploy an Autoware autonomous driving stack using YAML-based system design — without writing ROS 2 launch files by hand.
What is Autoware System Designer?
Autoware System Designer is a toolset that lets you describe your entire software system in structured YAML files and automatically generates correct-by-construction ROS 2 launch files, parameter templates, and system visualization diagrams from them.
A system is composed of four entity types:
| Entity | File | Description |
|---|---|---|
| Node | *.node.yaml |
A single ROS 2 node — its topics, parameters, and execution config |
| Module | *.module.yaml |
A reusable group of nodes/sub-modules with wired connections |
| System | *.system.yaml |
The top-level description: components, connections, modes |
| Parameter Set | *.parameter_set.yaml |
Parameter overrides applied to nodes at deployment time |
The build step collects node definitions from across the workspace (resolved via workspace.yaml), combines them with the system design files in this package, and generates launch files and a system visualization:
each ROS 2 package (core, universe, …) ┐
└── design/node/ *.node.yaml │
├── autoware_system_designer
this package │
├── design/node/ *.node.yaml (optional) │
├── design/module/ *.module.yaml │
├── design/system/ *.system.yaml │
└── design/parameter_set/ *.parameter_set.yaml ┘
│
▼
install/
├── systems.html
├── AutowareSample/
│ ├── Runtime.launch.xml
│ ├── LoggingSimulation.launch.xml
│ └── PlanningSimulation.launch.xml
└── ...node launchers...
The generated node diagram shows the full system topology including all modules, nodes, and topic connections:
Visualizing the System
After building, open the generated HTML page in your browser to interactively explore the full system graph:
# From your colcon workspace root
firefox install/systems.html
# or
google-chrome install/systems.html
The visualization page shows every node, module, topic connection, and operating mode defined in the system.
Package Structure
autoware_sample_designs/
├── design/
│ ├── node/ # System-specific node definitions (wrapper/optional nodes only)
│ ├── module/ # Reusable subsystem modules (sensing, perception, …)
│ ├── system/
│ │ └── AutowareSample.system.yaml # Top-level system definition
│ └── parameter_set/ # Parameter overrides per node, per mode
├── config/ # Shared parameter YAML files (owned by this package)
├── launch/ # Hand-written wrapper launch files for legacy integration
├── urdf/ # Vehicle URDF
├── workspace.yaml # Provider resolution rules for the system designer
└── CMakeLists.txt
The AutowareSample.system.yaml defines four operating modes — Runtime, LoggingSimulation, PlanningSimulation, and E2ESimulation — each with mode-specific component overrides and connections.
Relationship with autoware_launch
autoware_sample_designs is independent of autoware_launch as a system builder.
The system designer generates its own launch files and manages its own system topology.
autoware_launch does not control how this system is structured or launched.
The only connection is that some parameter set files reference shared parameter YAML files from autoware_launch (e.g., tracker, fusion, and filter configs that are common across vehicle variants):
# design/parameter_set/sample_system_perception.parameter_set.yaml
parameters:
- node: /perception/object_recognition/detection/clustering/...
param_files:
# shared param file from autoware_launch — values only, no launch dependency
- param_path: $(find-pkg-share autoware_launch)/config/perception/...
This is a runtime parameter file lookup — autoware_launch is not involved in building or launching the system. Node-specific parameters that belong to this vehicle configuration live in config/ inside this package itself.
Building
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| sample_sensor_kit_description | |
| sample_sensor_kit_launch | |
| sample_vehicle_description | |
| autoware_system_designer |
System Dependencies
Dependant Packages
Launch files
- launch/sample_system_adapi_wrapper.launch.xml
-
- default_adapi_param_path [default: $(find-pkg-share autoware_default_adapi_universe)/config/default_adapi.param.yaml]
- launch/sample_system_sensing_wrapper.launch.xml
-
- launch_driver [default: true]
- vehicle_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_info.param.yaml]
- vehicle_mirror_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_mirror.param.yaml]
- pointcloud_container_name [default: pointcloud_container]
Messages
Services
Plugins
Recent questions tagged autoware_sample_designs at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_launch.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taekjin Lee
- Maxime CLEMENT
- Max Schmeller
Authors
autoware_sample_designs
autoware_sample_designs is a complete, working example of defining and launching a full Autoware system using Autoware System Designer.
It serves as the reference implementation for how to describe, configure, and deploy an Autoware autonomous driving stack using YAML-based system design — without writing ROS 2 launch files by hand.
What is Autoware System Designer?
Autoware System Designer is a toolset that lets you describe your entire software system in structured YAML files and automatically generates correct-by-construction ROS 2 launch files, parameter templates, and system visualization diagrams from them.
A system is composed of four entity types:
| Entity | File | Description |
|---|---|---|
| Node | *.node.yaml |
A single ROS 2 node — its topics, parameters, and execution config |
| Module | *.module.yaml |
A reusable group of nodes/sub-modules with wired connections |
| System | *.system.yaml |
The top-level description: components, connections, modes |
| Parameter Set | *.parameter_set.yaml |
Parameter overrides applied to nodes at deployment time |
The build step collects node definitions from across the workspace (resolved via workspace.yaml), combines them with the system design files in this package, and generates launch files and a system visualization:
each ROS 2 package (core, universe, …) ┐
└── design/node/ *.node.yaml │
├── autoware_system_designer
this package │
├── design/node/ *.node.yaml (optional) │
├── design/module/ *.module.yaml │
├── design/system/ *.system.yaml │
└── design/parameter_set/ *.parameter_set.yaml ┘
│
▼
install/
├── systems.html
├── AutowareSample/
│ ├── Runtime.launch.xml
│ ├── LoggingSimulation.launch.xml
│ └── PlanningSimulation.launch.xml
└── ...node launchers...
The generated node diagram shows the full system topology including all modules, nodes, and topic connections:
Visualizing the System
After building, open the generated HTML page in your browser to interactively explore the full system graph:
# From your colcon workspace root
firefox install/systems.html
# or
google-chrome install/systems.html
The visualization page shows every node, module, topic connection, and operating mode defined in the system.
Package Structure
autoware_sample_designs/
├── design/
│ ├── node/ # System-specific node definitions (wrapper/optional nodes only)
│ ├── module/ # Reusable subsystem modules (sensing, perception, …)
│ ├── system/
│ │ └── AutowareSample.system.yaml # Top-level system definition
│ └── parameter_set/ # Parameter overrides per node, per mode
├── config/ # Shared parameter YAML files (owned by this package)
├── launch/ # Hand-written wrapper launch files for legacy integration
├── urdf/ # Vehicle URDF
├── workspace.yaml # Provider resolution rules for the system designer
└── CMakeLists.txt
The AutowareSample.system.yaml defines four operating modes — Runtime, LoggingSimulation, PlanningSimulation, and E2ESimulation — each with mode-specific component overrides and connections.
Relationship with autoware_launch
autoware_sample_designs is independent of autoware_launch as a system builder.
The system designer generates its own launch files and manages its own system topology.
autoware_launch does not control how this system is structured or launched.
The only connection is that some parameter set files reference shared parameter YAML files from autoware_launch (e.g., tracker, fusion, and filter configs that are common across vehicle variants):
# design/parameter_set/sample_system_perception.parameter_set.yaml
parameters:
- node: /perception/object_recognition/detection/clustering/...
param_files:
# shared param file from autoware_launch — values only, no launch dependency
- param_path: $(find-pkg-share autoware_launch)/config/perception/...
This is a runtime parameter file lookup — autoware_launch is not involved in building or launching the system. Node-specific parameters that belong to this vehicle configuration live in config/ inside this package itself.
Building
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| sample_sensor_kit_description | |
| sample_sensor_kit_launch | |
| sample_vehicle_description | |
| autoware_system_designer |
System Dependencies
Dependant Packages
Launch files
- launch/sample_system_adapi_wrapper.launch.xml
-
- default_adapi_param_path [default: $(find-pkg-share autoware_default_adapi_universe)/config/default_adapi.param.yaml]
- launch/sample_system_sensing_wrapper.launch.xml
-
- launch_driver [default: true]
- vehicle_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_info.param.yaml]
- vehicle_mirror_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_mirror.param.yaml]
- pointcloud_container_name [default: pointcloud_container]
Messages
Services
Plugins
Recent questions tagged autoware_sample_designs at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_launch.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taekjin Lee
- Maxime CLEMENT
- Max Schmeller
Authors
autoware_sample_designs
autoware_sample_designs is a complete, working example of defining and launching a full Autoware system using Autoware System Designer.
It serves as the reference implementation for how to describe, configure, and deploy an Autoware autonomous driving stack using YAML-based system design — without writing ROS 2 launch files by hand.
What is Autoware System Designer?
Autoware System Designer is a toolset that lets you describe your entire software system in structured YAML files and automatically generates correct-by-construction ROS 2 launch files, parameter templates, and system visualization diagrams from them.
A system is composed of four entity types:
| Entity | File | Description |
|---|---|---|
| Node | *.node.yaml |
A single ROS 2 node — its topics, parameters, and execution config |
| Module | *.module.yaml |
A reusable group of nodes/sub-modules with wired connections |
| System | *.system.yaml |
The top-level description: components, connections, modes |
| Parameter Set | *.parameter_set.yaml |
Parameter overrides applied to nodes at deployment time |
The build step collects node definitions from across the workspace (resolved via workspace.yaml), combines them with the system design files in this package, and generates launch files and a system visualization:
each ROS 2 package (core, universe, …) ┐
└── design/node/ *.node.yaml │
├── autoware_system_designer
this package │
├── design/node/ *.node.yaml (optional) │
├── design/module/ *.module.yaml │
├── design/system/ *.system.yaml │
└── design/parameter_set/ *.parameter_set.yaml ┘
│
▼
install/
├── systems.html
├── AutowareSample/
│ ├── Runtime.launch.xml
│ ├── LoggingSimulation.launch.xml
│ └── PlanningSimulation.launch.xml
└── ...node launchers...
The generated node diagram shows the full system topology including all modules, nodes, and topic connections:
Visualizing the System
After building, open the generated HTML page in your browser to interactively explore the full system graph:
# From your colcon workspace root
firefox install/systems.html
# or
google-chrome install/systems.html
The visualization page shows every node, module, topic connection, and operating mode defined in the system.
Package Structure
autoware_sample_designs/
├── design/
│ ├── node/ # System-specific node definitions (wrapper/optional nodes only)
│ ├── module/ # Reusable subsystem modules (sensing, perception, …)
│ ├── system/
│ │ └── AutowareSample.system.yaml # Top-level system definition
│ └── parameter_set/ # Parameter overrides per node, per mode
├── config/ # Shared parameter YAML files (owned by this package)
├── launch/ # Hand-written wrapper launch files for legacy integration
├── urdf/ # Vehicle URDF
├── workspace.yaml # Provider resolution rules for the system designer
└── CMakeLists.txt
The AutowareSample.system.yaml defines four operating modes — Runtime, LoggingSimulation, PlanningSimulation, and E2ESimulation — each with mode-specific component overrides and connections.
Relationship with autoware_launch
autoware_sample_designs is independent of autoware_launch as a system builder.
The system designer generates its own launch files and manages its own system topology.
autoware_launch does not control how this system is structured or launched.
The only connection is that some parameter set files reference shared parameter YAML files from autoware_launch (e.g., tracker, fusion, and filter configs that are common across vehicle variants):
# design/parameter_set/sample_system_perception.parameter_set.yaml
parameters:
- node: /perception/object_recognition/detection/clustering/...
param_files:
# shared param file from autoware_launch — values only, no launch dependency
- param_path: $(find-pkg-share autoware_launch)/config/perception/...
This is a runtime parameter file lookup — autoware_launch is not involved in building or launching the system. Node-specific parameters that belong to this vehicle configuration live in config/ inside this package itself.
Building
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| sample_sensor_kit_description | |
| sample_sensor_kit_launch | |
| sample_vehicle_description | |
| autoware_system_designer |
System Dependencies
Dependant Packages
Launch files
- launch/sample_system_adapi_wrapper.launch.xml
-
- default_adapi_param_path [default: $(find-pkg-share autoware_default_adapi_universe)/config/default_adapi.param.yaml]
- launch/sample_system_sensing_wrapper.launch.xml
-
- launch_driver [default: true]
- vehicle_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_info.param.yaml]
- vehicle_mirror_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_mirror.param.yaml]
- pointcloud_container_name [default: pointcloud_container]
Messages
Services
Plugins
Recent questions tagged autoware_sample_designs at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_launch.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taekjin Lee
- Maxime CLEMENT
- Max Schmeller
Authors
autoware_sample_designs
autoware_sample_designs is a complete, working example of defining and launching a full Autoware system using Autoware System Designer.
It serves as the reference implementation for how to describe, configure, and deploy an Autoware autonomous driving stack using YAML-based system design — without writing ROS 2 launch files by hand.
What is Autoware System Designer?
Autoware System Designer is a toolset that lets you describe your entire software system in structured YAML files and automatically generates correct-by-construction ROS 2 launch files, parameter templates, and system visualization diagrams from them.
A system is composed of four entity types:
| Entity | File | Description |
|---|---|---|
| Node | *.node.yaml |
A single ROS 2 node — its topics, parameters, and execution config |
| Module | *.module.yaml |
A reusable group of nodes/sub-modules with wired connections |
| System | *.system.yaml |
The top-level description: components, connections, modes |
| Parameter Set | *.parameter_set.yaml |
Parameter overrides applied to nodes at deployment time |
The build step collects node definitions from across the workspace (resolved via workspace.yaml), combines them with the system design files in this package, and generates launch files and a system visualization:
each ROS 2 package (core, universe, …) ┐
└── design/node/ *.node.yaml │
├── autoware_system_designer
this package │
├── design/node/ *.node.yaml (optional) │
├── design/module/ *.module.yaml │
├── design/system/ *.system.yaml │
└── design/parameter_set/ *.parameter_set.yaml ┘
│
▼
install/
├── systems.html
├── AutowareSample/
│ ├── Runtime.launch.xml
│ ├── LoggingSimulation.launch.xml
│ └── PlanningSimulation.launch.xml
└── ...node launchers...
The generated node diagram shows the full system topology including all modules, nodes, and topic connections:
Visualizing the System
After building, open the generated HTML page in your browser to interactively explore the full system graph:
# From your colcon workspace root
firefox install/systems.html
# or
google-chrome install/systems.html
The visualization page shows every node, module, topic connection, and operating mode defined in the system.
Package Structure
autoware_sample_designs/
├── design/
│ ├── node/ # System-specific node definitions (wrapper/optional nodes only)
│ ├── module/ # Reusable subsystem modules (sensing, perception, …)
│ ├── system/
│ │ └── AutowareSample.system.yaml # Top-level system definition
│ └── parameter_set/ # Parameter overrides per node, per mode
├── config/ # Shared parameter YAML files (owned by this package)
├── launch/ # Hand-written wrapper launch files for legacy integration
├── urdf/ # Vehicle URDF
├── workspace.yaml # Provider resolution rules for the system designer
└── CMakeLists.txt
The AutowareSample.system.yaml defines four operating modes — Runtime, LoggingSimulation, PlanningSimulation, and E2ESimulation — each with mode-specific component overrides and connections.
Relationship with autoware_launch
autoware_sample_designs is independent of autoware_launch as a system builder.
The system designer generates its own launch files and manages its own system topology.
autoware_launch does not control how this system is structured or launched.
The only connection is that some parameter set files reference shared parameter YAML files from autoware_launch (e.g., tracker, fusion, and filter configs that are common across vehicle variants):
# design/parameter_set/sample_system_perception.parameter_set.yaml
parameters:
- node: /perception/object_recognition/detection/clustering/...
param_files:
# shared param file from autoware_launch — values only, no launch dependency
- param_path: $(find-pkg-share autoware_launch)/config/perception/...
This is a runtime parameter file lookup — autoware_launch is not involved in building or launching the system. Node-specific parameters that belong to this vehicle configuration live in config/ inside this package itself.
Building
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| sample_sensor_kit_description | |
| sample_sensor_kit_launch | |
| sample_vehicle_description | |
| autoware_system_designer |
System Dependencies
Dependant Packages
Launch files
- launch/sample_system_adapi_wrapper.launch.xml
-
- default_adapi_param_path [default: $(find-pkg-share autoware_default_adapi_universe)/config/default_adapi.param.yaml]
- launch/sample_system_sensing_wrapper.launch.xml
-
- launch_driver [default: true]
- vehicle_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_info.param.yaml]
- vehicle_mirror_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_mirror.param.yaml]
- pointcloud_container_name [default: pointcloud_container]
Messages
Services
Plugins
Recent questions tagged autoware_sample_designs at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_launch.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taekjin Lee
- Maxime CLEMENT
- Max Schmeller
Authors
autoware_sample_designs
autoware_sample_designs is a complete, working example of defining and launching a full Autoware system using Autoware System Designer.
It serves as the reference implementation for how to describe, configure, and deploy an Autoware autonomous driving stack using YAML-based system design — without writing ROS 2 launch files by hand.
What is Autoware System Designer?
Autoware System Designer is a toolset that lets you describe your entire software system in structured YAML files and automatically generates correct-by-construction ROS 2 launch files, parameter templates, and system visualization diagrams from them.
A system is composed of four entity types:
| Entity | File | Description |
|---|---|---|
| Node | *.node.yaml |
A single ROS 2 node — its topics, parameters, and execution config |
| Module | *.module.yaml |
A reusable group of nodes/sub-modules with wired connections |
| System | *.system.yaml |
The top-level description: components, connections, modes |
| Parameter Set | *.parameter_set.yaml |
Parameter overrides applied to nodes at deployment time |
The build step collects node definitions from across the workspace (resolved via workspace.yaml), combines them with the system design files in this package, and generates launch files and a system visualization:
each ROS 2 package (core, universe, …) ┐
└── design/node/ *.node.yaml │
├── autoware_system_designer
this package │
├── design/node/ *.node.yaml (optional) │
├── design/module/ *.module.yaml │
├── design/system/ *.system.yaml │
└── design/parameter_set/ *.parameter_set.yaml ┘
│
▼
install/
├── systems.html
├── AutowareSample/
│ ├── Runtime.launch.xml
│ ├── LoggingSimulation.launch.xml
│ └── PlanningSimulation.launch.xml
└── ...node launchers...
The generated node diagram shows the full system topology including all modules, nodes, and topic connections:
Visualizing the System
After building, open the generated HTML page in your browser to interactively explore the full system graph:
# From your colcon workspace root
firefox install/systems.html
# or
google-chrome install/systems.html
The visualization page shows every node, module, topic connection, and operating mode defined in the system.
Package Structure
autoware_sample_designs/
├── design/
│ ├── node/ # System-specific node definitions (wrapper/optional nodes only)
│ ├── module/ # Reusable subsystem modules (sensing, perception, …)
│ ├── system/
│ │ └── AutowareSample.system.yaml # Top-level system definition
│ └── parameter_set/ # Parameter overrides per node, per mode
├── config/ # Shared parameter YAML files (owned by this package)
├── launch/ # Hand-written wrapper launch files for legacy integration
├── urdf/ # Vehicle URDF
├── workspace.yaml # Provider resolution rules for the system designer
└── CMakeLists.txt
The AutowareSample.system.yaml defines four operating modes — Runtime, LoggingSimulation, PlanningSimulation, and E2ESimulation — each with mode-specific component overrides and connections.
Relationship with autoware_launch
autoware_sample_designs is independent of autoware_launch as a system builder.
The system designer generates its own launch files and manages its own system topology.
autoware_launch does not control how this system is structured or launched.
The only connection is that some parameter set files reference shared parameter YAML files from autoware_launch (e.g., tracker, fusion, and filter configs that are common across vehicle variants):
# design/parameter_set/sample_system_perception.parameter_set.yaml
parameters:
- node: /perception/object_recognition/detection/clustering/...
param_files:
# shared param file from autoware_launch — values only, no launch dependency
- param_path: $(find-pkg-share autoware_launch)/config/perception/...
This is a runtime parameter file lookup — autoware_launch is not involved in building or launching the system. Node-specific parameters that belong to this vehicle configuration live in config/ inside this package itself.
Building
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| sample_sensor_kit_description | |
| sample_sensor_kit_launch | |
| sample_vehicle_description | |
| autoware_system_designer |
System Dependencies
Dependant Packages
Launch files
- launch/sample_system_adapi_wrapper.launch.xml
-
- default_adapi_param_path [default: $(find-pkg-share autoware_default_adapi_universe)/config/default_adapi.param.yaml]
- launch/sample_system_sensing_wrapper.launch.xml
-
- launch_driver [default: true]
- vehicle_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_info.param.yaml]
- vehicle_mirror_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_mirror.param.yaml]
- pointcloud_container_name [default: pointcloud_container]
Messages
Services
Plugins
Recent questions tagged autoware_sample_designs at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_launch.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-27 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taekjin Lee
- Maxime CLEMENT
- Max Schmeller
Authors
autoware_sample_designs
autoware_sample_designs is a complete, working example of defining and launching a full Autoware system using Autoware System Designer.
It serves as the reference implementation for how to describe, configure, and deploy an Autoware autonomous driving stack using YAML-based system design — without writing ROS 2 launch files by hand.
What is Autoware System Designer?
Autoware System Designer is a toolset that lets you describe your entire software system in structured YAML files and automatically generates correct-by-construction ROS 2 launch files, parameter templates, and system visualization diagrams from them.
A system is composed of four entity types:
| Entity | File | Description |
|---|---|---|
| Node | *.node.yaml |
A single ROS 2 node — its topics, parameters, and execution config |
| Module | *.module.yaml |
A reusable group of nodes/sub-modules with wired connections |
| System | *.system.yaml |
The top-level description: components, connections, modes |
| Parameter Set | *.parameter_set.yaml |
Parameter overrides applied to nodes at deployment time |
The build step collects node definitions from across the workspace (resolved via workspace.yaml), combines them with the system design files in this package, and generates launch files and a system visualization:
each ROS 2 package (core, universe, …) ┐
└── design/node/ *.node.yaml │
├── autoware_system_designer
this package │
├── design/node/ *.node.yaml (optional) │
├── design/module/ *.module.yaml │
├── design/system/ *.system.yaml │
└── design/parameter_set/ *.parameter_set.yaml ┘
│
▼
install/
├── systems.html
├── AutowareSample/
│ ├── Runtime.launch.xml
│ ├── LoggingSimulation.launch.xml
│ └── PlanningSimulation.launch.xml
└── ...node launchers...
The generated node diagram shows the full system topology including all modules, nodes, and topic connections:
Visualizing the System
After building, open the generated HTML page in your browser to interactively explore the full system graph:
# From your colcon workspace root
firefox install/systems.html
# or
google-chrome install/systems.html
The visualization page shows every node, module, topic connection, and operating mode defined in the system.
Package Structure
autoware_sample_designs/
├── design/
│ ├── node/ # System-specific node definitions (wrapper/optional nodes only)
│ ├── module/ # Reusable subsystem modules (sensing, perception, …)
│ ├── system/
│ │ └── AutowareSample.system.yaml # Top-level system definition
│ └── parameter_set/ # Parameter overrides per node, per mode
├── config/ # Shared parameter YAML files (owned by this package)
├── launch/ # Hand-written wrapper launch files for legacy integration
├── urdf/ # Vehicle URDF
├── workspace.yaml # Provider resolution rules for the system designer
└── CMakeLists.txt
The AutowareSample.system.yaml defines four operating modes — Runtime, LoggingSimulation, PlanningSimulation, and E2ESimulation — each with mode-specific component overrides and connections.
Relationship with autoware_launch
autoware_sample_designs is independent of autoware_launch as a system builder.
The system designer generates its own launch files and manages its own system topology.
autoware_launch does not control how this system is structured or launched.
The only connection is that some parameter set files reference shared parameter YAML files from autoware_launch (e.g., tracker, fusion, and filter configs that are common across vehicle variants):
# design/parameter_set/sample_system_perception.parameter_set.yaml
parameters:
- node: /perception/object_recognition/detection/clustering/...
param_files:
# shared param file from autoware_launch — values only, no launch dependency
- param_path: $(find-pkg-share autoware_launch)/config/perception/...
This is a runtime parameter file lookup — autoware_launch is not involved in building or launching the system. Node-specific parameters that belong to this vehicle configuration live in config/ inside this package itself.
Building
File truncated at 100 lines see the full file
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake_auto | |
| autoware_cmake | |
| sample_sensor_kit_description | |
| sample_sensor_kit_launch | |
| sample_vehicle_description | |
| autoware_system_designer |
System Dependencies
Dependant Packages
Launch files
- launch/sample_system_adapi_wrapper.launch.xml
-
- default_adapi_param_path [default: $(find-pkg-share autoware_default_adapi_universe)/config/default_adapi.param.yaml]
- launch/sample_system_sensing_wrapper.launch.xml
-
- launch_driver [default: true]
- vehicle_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_info.param.yaml]
- vehicle_mirror_param_file [default: $(find-pkg-share sample_vehicle_description)/config/vehicle_mirror.param.yaml]
- pointcloud_container_name [default: pointcloud_container]