
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takayuki Murooka
- Kosuke Takeuchi
Authors
- Takayuki Murooka
Static Centerline Generator
Purpose
This package statically calculates the centerline satisfying path footprints inside the drivable area.
On narrow-road driving, the default centerline, which is the middle line between lanelets’ right and left boundaries, often causes path footprints outside the drivable area. To make path footprints inside the drivable area, we use online path shape optimization by the autoware_path_optimizer package.
Instead of online path shape optimization, we introduce static centerline optimization. With this static centerline optimization, we have following advantages.
- We can see the optimized centerline shape in advance.
- With the default autoware, path shape is not determined until the vehicle drives there.
- This enables offline path shape evaluation.
- We do not have to calculate a heavy and sometimes unstable path optimization since the path footprints are already inside the drivable area.
Use cases
There are two interfaces to communicate with the centerline optimizer.
Vector Map Builder Interface
Note: This function of Vector Map Builder has not been released. Please wait for a while. Currently there is no documentation about Vector Map Builder’s operation for this function.
The optimized centerline can be generated from Vector Map Builder’s operation.
We can run
- path planning server
- http server to connect path planning server and Vector Map Builder
with the following command by designating <vehicle_model>
ros2 launch autoware_static_centerline_generator run_planning_server.launch.xml vehicle_model:=<vehicle-model>
FYI, port ID of the http server is 4010 by default.
Command Line Interface
The optimized centerline can be generated from the command line interface by designating
<input-osm-path>-
<output-osm-path>(not mandatory) <start-lanelet-id>-
<start-pose>(not mandatory) <end-lanelet-id>-
<end-pose>(not mandatory) <vehicle-model>-
<goal-method>(not mandatory,path_generatororbehavior_path_planneronly) -
<lanelet-sequence>(not mandatory)
ros2 launch autoware_static_centerline_generator static_centerline_generator.launch.xml run_backgrond:=false lanelet2_input_file_path:=<input-osm-path> lanelet2_output_file_path:=<output-osm-path> start_lanelet_id:=<start-lane-id> start_pose:=<start-pose> end_lanelet_id:=<end-lane-id> end_pose:=<end-pose> vehicle_model:=<vehicle-model> goal_method:=<goal-method> lanelet_sequence:=<lanelet-sequence>
Note that <goal-method>:=behavior_path_planner is not currently supported.
The default output map path containing the optimized centerline locates /tmp/autoware_static_centerline_generator/lanelet2_map.osm.
If you want to change the output map path, you can remap the path by designating <output-osm-path>.
By specifying start-pose, goal-pose, and goal-method, the centerline from start-pose to goal-pose can be embedded.
<start-pose>, <goal-pose> are entered like [position.x, position.y, position.z, orientation.x, orientation.y, orientation.z, orientation.w] with double type.
In order to run smoothly to the goal pose, goal-method is used.
Only path_generator or behavior_path_planner can be entered for <goal_method>.
In <lanelet-sequence>, you can specify the lanelet_ids for the static centerline to be embedded like "100,101,102".
The input route must be continuous and a drivable path.
[!WARNING] If the start pose is off the center of the lane, it is necessary to manually embed a centerline that smoothly connects the start pose and the start lane in advance using VMB, etc.
Architecture

Visualization
When performing validation, launch rviz as follows.
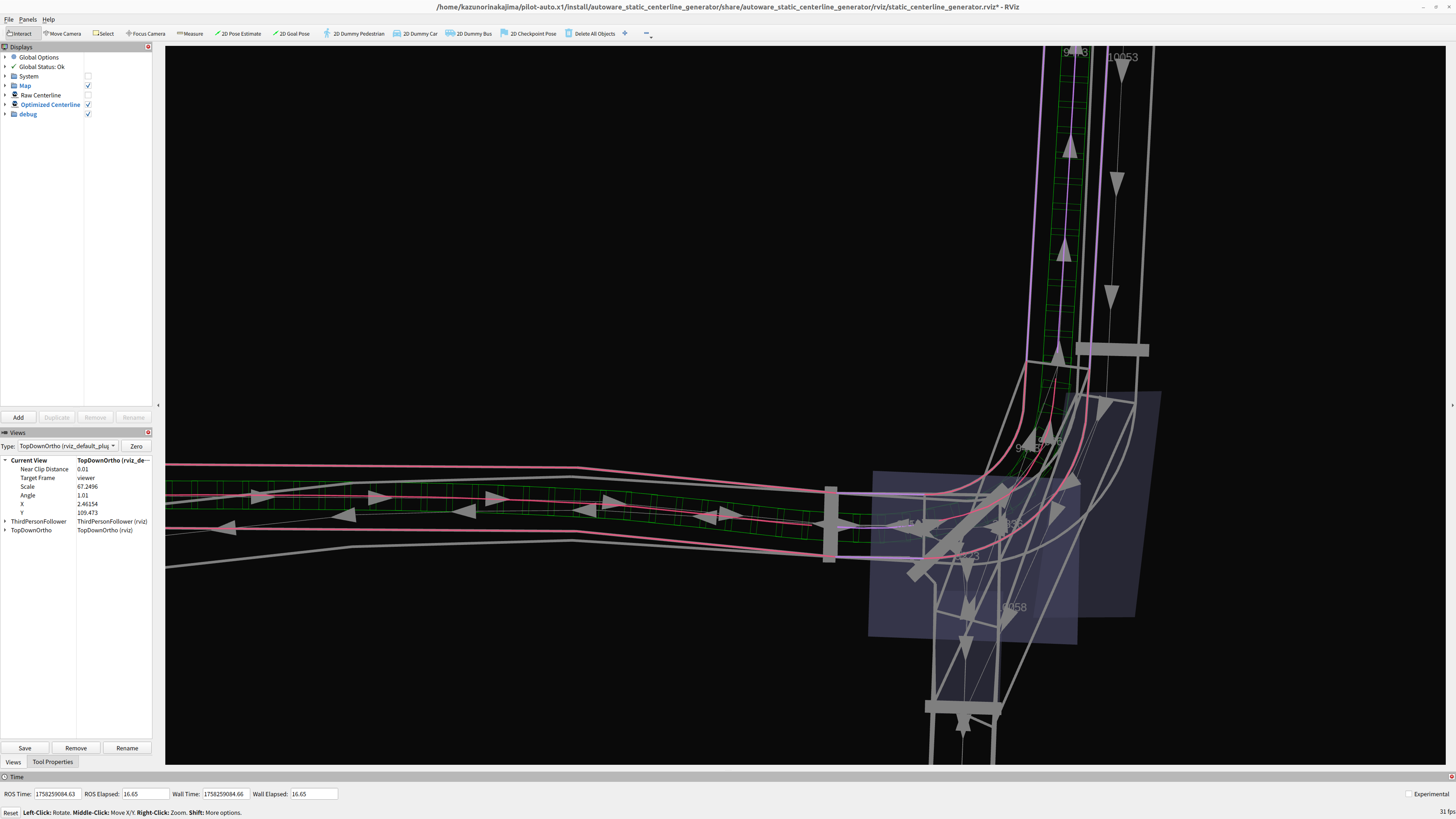
- Gray lines indicate map information such as
laneletorstop line. - The pink and purple lines show the boundaries of the
laneletwith embedded fixed paths and the embedded static centerline themselves.- The pink and purple breaks indicate where
laneletsswitch.
- The pink and purple breaks indicate where
- The green boxes are safe footprints.
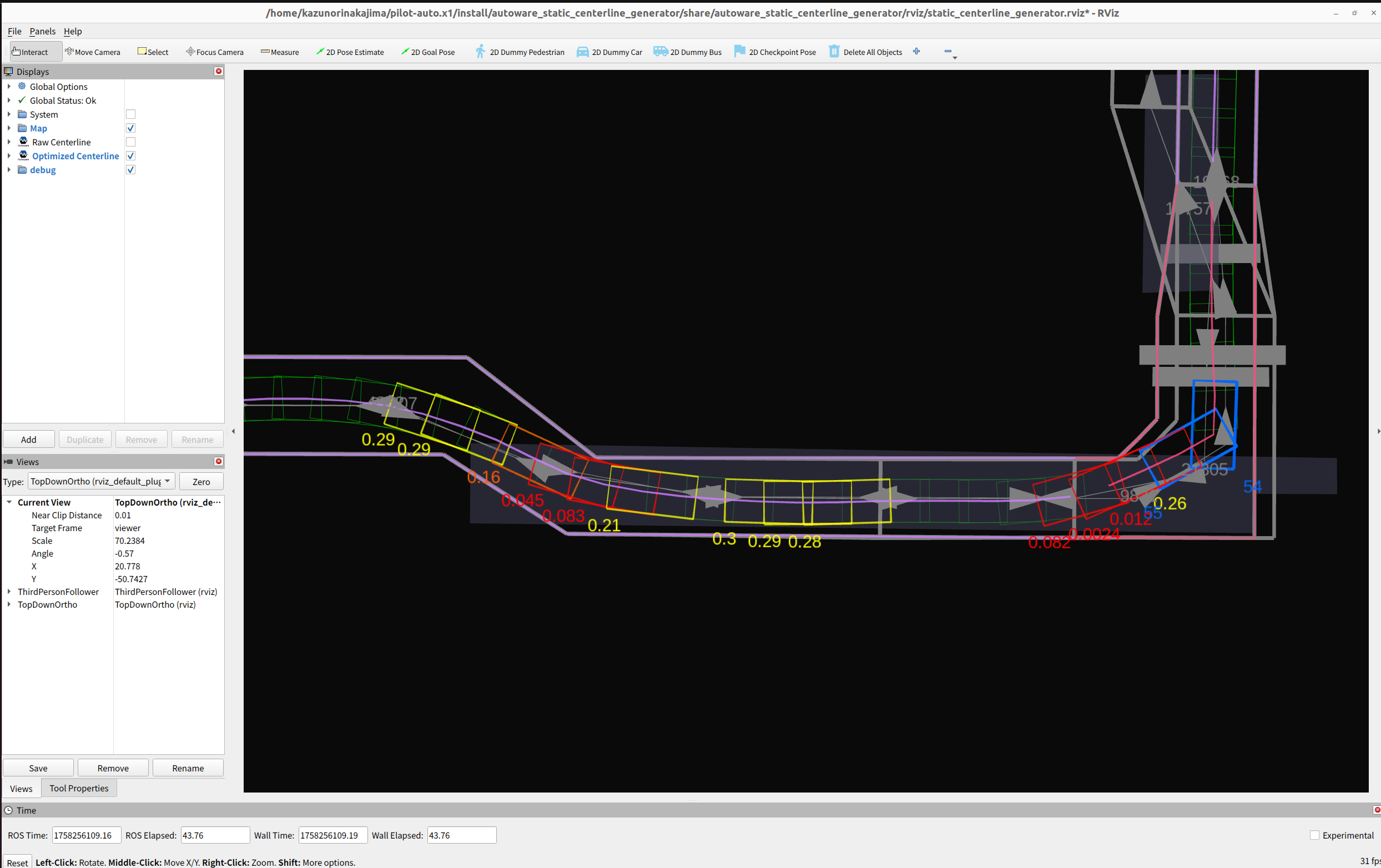
Unsafe Footprints
Optimized centerline may present the following hazards.
These can be identified using the unsafe footprints marker.
- When the footprint approaches the vehicle boundary
- When making abrupt directional changes
Footprint color changes based on distance to the boundary and the angular difference between front and rear points, with distance displayed as text.
File truncated at 100 lines see the full file
Changelog for package autoware_static_centerline_generator
0.6.0 (2026-02-14)
-
fix: unable to asign lanelet_id to centerpoint near the boundary line (#350) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline_generator): use autoware_qos_utils and add missing headers (#348)
-
refert: pr #341 fix(autoware_static_centerline_generator): update initialization of path_generator (#342) Revert "fix(autoware_static_centerline_generator): update initialization of p…" This reverts commit 69ac94a925cb498e8148eb1ed043b39dfd448b60.
-
fix(autoware_static_centerline_generator): update initialization of path_generator (#341)
- fix(autoware_static_centerline_generator): update initialization of path_generator_node
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Kazunori-Nakajima, Ryohsuke Mitsudome
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
-
feat(static_centerline): add jitter validation (#305)
- feat(static_centerline): add jitter validation
- fix: extra comment
- fix
- fix readme and comment
- fix
* fix: optimization_trajectory_based_centerline ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(static_centerline_generator): inside centerline start point in start lanelet (#274) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline): enabled input of lanelet_sequence (#299)
- feat(static_centerline): enabled input of lanelet_sequence
- pre-commit
- fix cast
- pre-commit
* fix readme ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
chore: sync files (#278)
-
Contributors: Kazunori-Nakajima, awf-autoware-bot[bot]
0.3.0 (2025-08-11)
-
fix(autoware_static_centerline_generator): fix test dependency (#285)
- fix(autoware_static_centerline_generator): fix test dependency
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
ci(build-and-test): fix ci issues (#283)
-
chore: sync files (#214)
-
fix(static_centerline_generator): do not embed a single point centerline (#271) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(autoware_static_centerline_generator): fix the name of the executable in static_centerline_generator.launch.xml (#258) fix the name of the executable in static_centerline_generator.launch.xml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/run_planning_server.launch.xml
-
- vehicle_model
- launch/static_centerline_generator.launch.xml
-
- vehicle_model [default: autoware_sample_vehicle]
- mode [default: AUTO]
- rviz [default: true]
- centerline_source [default: optimization_trajectory_base]
- lanelet2_input_file_path [default: ]
- lanelet2_output_file_path [default: /tmp/autoware_static_centerline_generator/lanelet2_map.osm]
- start_lanelet_id [default: 0]
- start_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- end_lanelet_id [default: 0]
- end_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- goal_method [default: None]
- lanelet_sequence [default: ]
- jitter_deg_threshold [default: 40]
- bag_filename [default: bag.db3]
- lanelet2_map_topic [default: /map/vector_map]
- lanelet2_map_marker_topic [default: /map/vector_map_marker]
- common_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/common.param.yaml]
- nearest_search_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/nearest_search.param.yaml]
- map_loader_param [default: $(find-pkg-share autoware_launch)/config/map/lanelet2_map_loader.param.yaml]
- behavior_path_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/behavior_path_planner.param.yaml]
- behavior_velocity_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_velocity_planner/behavior_velocity_planner.param.yaml]
- path_generator_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/path_generator/path_generator.param.yaml]
- path_smoother_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/path_smoother/elastic_band_smoother.param.yaml]
- path_optimizer_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/autoware_path_optimizer/path_optimizer.param.yaml]
- mission_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/mission_planning/mission_planner/mission_planner.param.yaml]
Messages
Plugins
Recent questions tagged autoware_static_centerline_generator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takayuki Murooka
- Kosuke Takeuchi
Authors
- Takayuki Murooka
Static Centerline Generator
Purpose
This package statically calculates the centerline satisfying path footprints inside the drivable area.
On narrow-road driving, the default centerline, which is the middle line between lanelets’ right and left boundaries, often causes path footprints outside the drivable area. To make path footprints inside the drivable area, we use online path shape optimization by the autoware_path_optimizer package.
Instead of online path shape optimization, we introduce static centerline optimization. With this static centerline optimization, we have following advantages.
- We can see the optimized centerline shape in advance.
- With the default autoware, path shape is not determined until the vehicle drives there.
- This enables offline path shape evaluation.
- We do not have to calculate a heavy and sometimes unstable path optimization since the path footprints are already inside the drivable area.
Use cases
There are two interfaces to communicate with the centerline optimizer.
Vector Map Builder Interface
Note: This function of Vector Map Builder has not been released. Please wait for a while. Currently there is no documentation about Vector Map Builder’s operation for this function.
The optimized centerline can be generated from Vector Map Builder’s operation.
We can run
- path planning server
- http server to connect path planning server and Vector Map Builder
with the following command by designating <vehicle_model>
ros2 launch autoware_static_centerline_generator run_planning_server.launch.xml vehicle_model:=<vehicle-model>
FYI, port ID of the http server is 4010 by default.
Command Line Interface
The optimized centerline can be generated from the command line interface by designating
<input-osm-path>-
<output-osm-path>(not mandatory) <start-lanelet-id>-
<start-pose>(not mandatory) <end-lanelet-id>-
<end-pose>(not mandatory) <vehicle-model>-
<goal-method>(not mandatory,path_generatororbehavior_path_planneronly) -
<lanelet-sequence>(not mandatory)
ros2 launch autoware_static_centerline_generator static_centerline_generator.launch.xml run_backgrond:=false lanelet2_input_file_path:=<input-osm-path> lanelet2_output_file_path:=<output-osm-path> start_lanelet_id:=<start-lane-id> start_pose:=<start-pose> end_lanelet_id:=<end-lane-id> end_pose:=<end-pose> vehicle_model:=<vehicle-model> goal_method:=<goal-method> lanelet_sequence:=<lanelet-sequence>
Note that <goal-method>:=behavior_path_planner is not currently supported.
The default output map path containing the optimized centerline locates /tmp/autoware_static_centerline_generator/lanelet2_map.osm.
If you want to change the output map path, you can remap the path by designating <output-osm-path>.
By specifying start-pose, goal-pose, and goal-method, the centerline from start-pose to goal-pose can be embedded.
<start-pose>, <goal-pose> are entered like [position.x, position.y, position.z, orientation.x, orientation.y, orientation.z, orientation.w] with double type.
In order to run smoothly to the goal pose, goal-method is used.
Only path_generator or behavior_path_planner can be entered for <goal_method>.
In <lanelet-sequence>, you can specify the lanelet_ids for the static centerline to be embedded like "100,101,102".
The input route must be continuous and a drivable path.
[!WARNING] If the start pose is off the center of the lane, it is necessary to manually embed a centerline that smoothly connects the start pose and the start lane in advance using VMB, etc.
Architecture
Visualization
When performing validation, launch rviz as follows.
- Gray lines indicate map information such as
laneletorstop line. - The pink and purple lines show the boundaries of the
laneletwith embedded fixed paths and the embedded static centerline themselves.- The pink and purple breaks indicate where
laneletsswitch.
- The pink and purple breaks indicate where
- The green boxes are safe footprints.
Unsafe Footprints
Optimized centerline may present the following hazards.
These can be identified using the unsafe footprints marker.
- When the footprint approaches the vehicle boundary
- When making abrupt directional changes
Footprint color changes based on distance to the boundary and the angular difference between front and rear points, with distance displayed as text.
File truncated at 100 lines see the full file
Changelog for package autoware_static_centerline_generator
0.6.0 (2026-02-14)
-
fix: unable to asign lanelet_id to centerpoint near the boundary line (#350) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline_generator): use autoware_qos_utils and add missing headers (#348)
-
refert: pr #341 fix(autoware_static_centerline_generator): update initialization of path_generator (#342) Revert "fix(autoware_static_centerline_generator): update initialization of p…" This reverts commit 69ac94a925cb498e8148eb1ed043b39dfd448b60.
-
fix(autoware_static_centerline_generator): update initialization of path_generator (#341)
- fix(autoware_static_centerline_generator): update initialization of path_generator_node
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Kazunori-Nakajima, Ryohsuke Mitsudome
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
-
feat(static_centerline): add jitter validation (#305)
- feat(static_centerline): add jitter validation
- fix: extra comment
- fix
- fix readme and comment
- fix
* fix: optimization_trajectory_based_centerline ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(static_centerline_generator): inside centerline start point in start lanelet (#274) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline): enabled input of lanelet_sequence (#299)
- feat(static_centerline): enabled input of lanelet_sequence
- pre-commit
- fix cast
- pre-commit
* fix readme ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
chore: sync files (#278)
-
Contributors: Kazunori-Nakajima, awf-autoware-bot[bot]
0.3.0 (2025-08-11)
-
fix(autoware_static_centerline_generator): fix test dependency (#285)
- fix(autoware_static_centerline_generator): fix test dependency
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
ci(build-and-test): fix ci issues (#283)
-
chore: sync files (#214)
-
fix(static_centerline_generator): do not embed a single point centerline (#271) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(autoware_static_centerline_generator): fix the name of the executable in static_centerline_generator.launch.xml (#258) fix the name of the executable in static_centerline_generator.launch.xml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/run_planning_server.launch.xml
-
- vehicle_model
- launch/static_centerline_generator.launch.xml
-
- vehicle_model [default: autoware_sample_vehicle]
- mode [default: AUTO]
- rviz [default: true]
- centerline_source [default: optimization_trajectory_base]
- lanelet2_input_file_path [default: ]
- lanelet2_output_file_path [default: /tmp/autoware_static_centerline_generator/lanelet2_map.osm]
- start_lanelet_id [default: 0]
- start_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- end_lanelet_id [default: 0]
- end_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- goal_method [default: None]
- lanelet_sequence [default: ]
- jitter_deg_threshold [default: 40]
- bag_filename [default: bag.db3]
- lanelet2_map_topic [default: /map/vector_map]
- lanelet2_map_marker_topic [default: /map/vector_map_marker]
- common_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/common.param.yaml]
- nearest_search_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/nearest_search.param.yaml]
- map_loader_param [default: $(find-pkg-share autoware_launch)/config/map/lanelet2_map_loader.param.yaml]
- behavior_path_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/behavior_path_planner.param.yaml]
- behavior_velocity_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_velocity_planner/behavior_velocity_planner.param.yaml]
- path_generator_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/path_generator/path_generator.param.yaml]
- path_smoother_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/path_smoother/elastic_band_smoother.param.yaml]
- path_optimizer_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/autoware_path_optimizer/path_optimizer.param.yaml]
- mission_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/mission_planning/mission_planner/mission_planner.param.yaml]
Messages
Plugins
Recent questions tagged autoware_static_centerline_generator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takayuki Murooka
- Kosuke Takeuchi
Authors
- Takayuki Murooka
Static Centerline Generator
Purpose
This package statically calculates the centerline satisfying path footprints inside the drivable area.
On narrow-road driving, the default centerline, which is the middle line between lanelets’ right and left boundaries, often causes path footprints outside the drivable area. To make path footprints inside the drivable area, we use online path shape optimization by the autoware_path_optimizer package.
Instead of online path shape optimization, we introduce static centerline optimization. With this static centerline optimization, we have following advantages.
- We can see the optimized centerline shape in advance.
- With the default autoware, path shape is not determined until the vehicle drives there.
- This enables offline path shape evaluation.
- We do not have to calculate a heavy and sometimes unstable path optimization since the path footprints are already inside the drivable area.
Use cases
There are two interfaces to communicate with the centerline optimizer.
Vector Map Builder Interface
Note: This function of Vector Map Builder has not been released. Please wait for a while. Currently there is no documentation about Vector Map Builder’s operation for this function.
The optimized centerline can be generated from Vector Map Builder’s operation.
We can run
- path planning server
- http server to connect path planning server and Vector Map Builder
with the following command by designating <vehicle_model>
ros2 launch autoware_static_centerline_generator run_planning_server.launch.xml vehicle_model:=<vehicle-model>
FYI, port ID of the http server is 4010 by default.
Command Line Interface
The optimized centerline can be generated from the command line interface by designating
<input-osm-path>-
<output-osm-path>(not mandatory) <start-lanelet-id>-
<start-pose>(not mandatory) <end-lanelet-id>-
<end-pose>(not mandatory) <vehicle-model>-
<goal-method>(not mandatory,path_generatororbehavior_path_planneronly) -
<lanelet-sequence>(not mandatory)
ros2 launch autoware_static_centerline_generator static_centerline_generator.launch.xml run_backgrond:=false lanelet2_input_file_path:=<input-osm-path> lanelet2_output_file_path:=<output-osm-path> start_lanelet_id:=<start-lane-id> start_pose:=<start-pose> end_lanelet_id:=<end-lane-id> end_pose:=<end-pose> vehicle_model:=<vehicle-model> goal_method:=<goal-method> lanelet_sequence:=<lanelet-sequence>
Note that <goal-method>:=behavior_path_planner is not currently supported.
The default output map path containing the optimized centerline locates /tmp/autoware_static_centerline_generator/lanelet2_map.osm.
If you want to change the output map path, you can remap the path by designating <output-osm-path>.
By specifying start-pose, goal-pose, and goal-method, the centerline from start-pose to goal-pose can be embedded.
<start-pose>, <goal-pose> are entered like [position.x, position.y, position.z, orientation.x, orientation.y, orientation.z, orientation.w] with double type.
In order to run smoothly to the goal pose, goal-method is used.
Only path_generator or behavior_path_planner can be entered for <goal_method>.
In <lanelet-sequence>, you can specify the lanelet_ids for the static centerline to be embedded like "100,101,102".
The input route must be continuous and a drivable path.
[!WARNING] If the start pose is off the center of the lane, it is necessary to manually embed a centerline that smoothly connects the start pose and the start lane in advance using VMB, etc.
Architecture
Visualization
When performing validation, launch rviz as follows.
- Gray lines indicate map information such as
laneletorstop line. - The pink and purple lines show the boundaries of the
laneletwith embedded fixed paths and the embedded static centerline themselves.- The pink and purple breaks indicate where
laneletsswitch.
- The pink and purple breaks indicate where
- The green boxes are safe footprints.
Unsafe Footprints
Optimized centerline may present the following hazards.
These can be identified using the unsafe footprints marker.
- When the footprint approaches the vehicle boundary
- When making abrupt directional changes
Footprint color changes based on distance to the boundary and the angular difference between front and rear points, with distance displayed as text.
File truncated at 100 lines see the full file
Changelog for package autoware_static_centerline_generator
0.6.0 (2026-02-14)
-
fix: unable to asign lanelet_id to centerpoint near the boundary line (#350) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline_generator): use autoware_qos_utils and add missing headers (#348)
-
refert: pr #341 fix(autoware_static_centerline_generator): update initialization of path_generator (#342) Revert "fix(autoware_static_centerline_generator): update initialization of p…" This reverts commit 69ac94a925cb498e8148eb1ed043b39dfd448b60.
-
fix(autoware_static_centerline_generator): update initialization of path_generator (#341)
- fix(autoware_static_centerline_generator): update initialization of path_generator_node
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Kazunori-Nakajima, Ryohsuke Mitsudome
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
-
feat(static_centerline): add jitter validation (#305)
- feat(static_centerline): add jitter validation
- fix: extra comment
- fix
- fix readme and comment
- fix
* fix: optimization_trajectory_based_centerline ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(static_centerline_generator): inside centerline start point in start lanelet (#274) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline): enabled input of lanelet_sequence (#299)
- feat(static_centerline): enabled input of lanelet_sequence
- pre-commit
- fix cast
- pre-commit
* fix readme ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
chore: sync files (#278)
-
Contributors: Kazunori-Nakajima, awf-autoware-bot[bot]
0.3.0 (2025-08-11)
-
fix(autoware_static_centerline_generator): fix test dependency (#285)
- fix(autoware_static_centerline_generator): fix test dependency
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
ci(build-and-test): fix ci issues (#283)
-
chore: sync files (#214)
-
fix(static_centerline_generator): do not embed a single point centerline (#271) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(autoware_static_centerline_generator): fix the name of the executable in static_centerline_generator.launch.xml (#258) fix the name of the executable in static_centerline_generator.launch.xml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/run_planning_server.launch.xml
-
- vehicle_model
- launch/static_centerline_generator.launch.xml
-
- vehicle_model [default: autoware_sample_vehicle]
- mode [default: AUTO]
- rviz [default: true]
- centerline_source [default: optimization_trajectory_base]
- lanelet2_input_file_path [default: ]
- lanelet2_output_file_path [default: /tmp/autoware_static_centerline_generator/lanelet2_map.osm]
- start_lanelet_id [default: 0]
- start_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- end_lanelet_id [default: 0]
- end_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- goal_method [default: None]
- lanelet_sequence [default: ]
- jitter_deg_threshold [default: 40]
- bag_filename [default: bag.db3]
- lanelet2_map_topic [default: /map/vector_map]
- lanelet2_map_marker_topic [default: /map/vector_map_marker]
- common_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/common.param.yaml]
- nearest_search_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/nearest_search.param.yaml]
- map_loader_param [default: $(find-pkg-share autoware_launch)/config/map/lanelet2_map_loader.param.yaml]
- behavior_path_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/behavior_path_planner.param.yaml]
- behavior_velocity_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_velocity_planner/behavior_velocity_planner.param.yaml]
- path_generator_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/path_generator/path_generator.param.yaml]
- path_smoother_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/path_smoother/elastic_band_smoother.param.yaml]
- path_optimizer_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/autoware_path_optimizer/path_optimizer.param.yaml]
- mission_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/mission_planning/mission_planner/mission_planner.param.yaml]
Messages
Plugins
Recent questions tagged autoware_static_centerline_generator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takayuki Murooka
- Kosuke Takeuchi
Authors
- Takayuki Murooka
Static Centerline Generator
Purpose
This package statically calculates the centerline satisfying path footprints inside the drivable area.
On narrow-road driving, the default centerline, which is the middle line between lanelets’ right and left boundaries, often causes path footprints outside the drivable area. To make path footprints inside the drivable area, we use online path shape optimization by the autoware_path_optimizer package.
Instead of online path shape optimization, we introduce static centerline optimization. With this static centerline optimization, we have following advantages.
- We can see the optimized centerline shape in advance.
- With the default autoware, path shape is not determined until the vehicle drives there.
- This enables offline path shape evaluation.
- We do not have to calculate a heavy and sometimes unstable path optimization since the path footprints are already inside the drivable area.
Use cases
There are two interfaces to communicate with the centerline optimizer.
Vector Map Builder Interface
Note: This function of Vector Map Builder has not been released. Please wait for a while. Currently there is no documentation about Vector Map Builder’s operation for this function.
The optimized centerline can be generated from Vector Map Builder’s operation.
We can run
- path planning server
- http server to connect path planning server and Vector Map Builder
with the following command by designating <vehicle_model>
ros2 launch autoware_static_centerline_generator run_planning_server.launch.xml vehicle_model:=<vehicle-model>
FYI, port ID of the http server is 4010 by default.
Command Line Interface
The optimized centerline can be generated from the command line interface by designating
<input-osm-path>-
<output-osm-path>(not mandatory) <start-lanelet-id>-
<start-pose>(not mandatory) <end-lanelet-id>-
<end-pose>(not mandatory) <vehicle-model>-
<goal-method>(not mandatory,path_generatororbehavior_path_planneronly) -
<lanelet-sequence>(not mandatory)
ros2 launch autoware_static_centerline_generator static_centerline_generator.launch.xml run_backgrond:=false lanelet2_input_file_path:=<input-osm-path> lanelet2_output_file_path:=<output-osm-path> start_lanelet_id:=<start-lane-id> start_pose:=<start-pose> end_lanelet_id:=<end-lane-id> end_pose:=<end-pose> vehicle_model:=<vehicle-model> goal_method:=<goal-method> lanelet_sequence:=<lanelet-sequence>
Note that <goal-method>:=behavior_path_planner is not currently supported.
The default output map path containing the optimized centerline locates /tmp/autoware_static_centerline_generator/lanelet2_map.osm.
If you want to change the output map path, you can remap the path by designating <output-osm-path>.
By specifying start-pose, goal-pose, and goal-method, the centerline from start-pose to goal-pose can be embedded.
<start-pose>, <goal-pose> are entered like [position.x, position.y, position.z, orientation.x, orientation.y, orientation.z, orientation.w] with double type.
In order to run smoothly to the goal pose, goal-method is used.
Only path_generator or behavior_path_planner can be entered for <goal_method>.
In <lanelet-sequence>, you can specify the lanelet_ids for the static centerline to be embedded like "100,101,102".
The input route must be continuous and a drivable path.
[!WARNING] If the start pose is off the center of the lane, it is necessary to manually embed a centerline that smoothly connects the start pose and the start lane in advance using VMB, etc.
Architecture
Visualization
When performing validation, launch rviz as follows.
- Gray lines indicate map information such as
laneletorstop line. - The pink and purple lines show the boundaries of the
laneletwith embedded fixed paths and the embedded static centerline themselves.- The pink and purple breaks indicate where
laneletsswitch.
- The pink and purple breaks indicate where
- The green boxes are safe footprints.
Unsafe Footprints
Optimized centerline may present the following hazards.
These can be identified using the unsafe footprints marker.
- When the footprint approaches the vehicle boundary
- When making abrupt directional changes
Footprint color changes based on distance to the boundary and the angular difference between front and rear points, with distance displayed as text.
File truncated at 100 lines see the full file
Changelog for package autoware_static_centerline_generator
0.6.0 (2026-02-14)
-
fix: unable to asign lanelet_id to centerpoint near the boundary line (#350) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline_generator): use autoware_qos_utils and add missing headers (#348)
-
refert: pr #341 fix(autoware_static_centerline_generator): update initialization of path_generator (#342) Revert "fix(autoware_static_centerline_generator): update initialization of p…" This reverts commit 69ac94a925cb498e8148eb1ed043b39dfd448b60.
-
fix(autoware_static_centerline_generator): update initialization of path_generator (#341)
- fix(autoware_static_centerline_generator): update initialization of path_generator_node
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Kazunori-Nakajima, Ryohsuke Mitsudome
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
-
feat(static_centerline): add jitter validation (#305)
- feat(static_centerline): add jitter validation
- fix: extra comment
- fix
- fix readme and comment
- fix
* fix: optimization_trajectory_based_centerline ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(static_centerline_generator): inside centerline start point in start lanelet (#274) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline): enabled input of lanelet_sequence (#299)
- feat(static_centerline): enabled input of lanelet_sequence
- pre-commit
- fix cast
- pre-commit
* fix readme ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
chore: sync files (#278)
-
Contributors: Kazunori-Nakajima, awf-autoware-bot[bot]
0.3.0 (2025-08-11)
-
fix(autoware_static_centerline_generator): fix test dependency (#285)
- fix(autoware_static_centerline_generator): fix test dependency
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
ci(build-and-test): fix ci issues (#283)
-
chore: sync files (#214)
-
fix(static_centerline_generator): do not embed a single point centerline (#271) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(autoware_static_centerline_generator): fix the name of the executable in static_centerline_generator.launch.xml (#258) fix the name of the executable in static_centerline_generator.launch.xml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/run_planning_server.launch.xml
-
- vehicle_model
- launch/static_centerline_generator.launch.xml
-
- vehicle_model [default: autoware_sample_vehicle]
- mode [default: AUTO]
- rviz [default: true]
- centerline_source [default: optimization_trajectory_base]
- lanelet2_input_file_path [default: ]
- lanelet2_output_file_path [default: /tmp/autoware_static_centerline_generator/lanelet2_map.osm]
- start_lanelet_id [default: 0]
- start_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- end_lanelet_id [default: 0]
- end_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- goal_method [default: None]
- lanelet_sequence [default: ]
- jitter_deg_threshold [default: 40]
- bag_filename [default: bag.db3]
- lanelet2_map_topic [default: /map/vector_map]
- lanelet2_map_marker_topic [default: /map/vector_map_marker]
- common_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/common.param.yaml]
- nearest_search_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/nearest_search.param.yaml]
- map_loader_param [default: $(find-pkg-share autoware_launch)/config/map/lanelet2_map_loader.param.yaml]
- behavior_path_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/behavior_path_planner.param.yaml]
- behavior_velocity_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_velocity_planner/behavior_velocity_planner.param.yaml]
- path_generator_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/path_generator/path_generator.param.yaml]
- path_smoother_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/path_smoother/elastic_band_smoother.param.yaml]
- path_optimizer_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/autoware_path_optimizer/path_optimizer.param.yaml]
- mission_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/mission_planning/mission_planner/mission_planner.param.yaml]
Messages
Plugins
Recent questions tagged autoware_static_centerline_generator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takayuki Murooka
- Kosuke Takeuchi
Authors
- Takayuki Murooka
Static Centerline Generator
Purpose
This package statically calculates the centerline satisfying path footprints inside the drivable area.
On narrow-road driving, the default centerline, which is the middle line between lanelets’ right and left boundaries, often causes path footprints outside the drivable area. To make path footprints inside the drivable area, we use online path shape optimization by the autoware_path_optimizer package.
Instead of online path shape optimization, we introduce static centerline optimization. With this static centerline optimization, we have following advantages.
- We can see the optimized centerline shape in advance.
- With the default autoware, path shape is not determined until the vehicle drives there.
- This enables offline path shape evaluation.
- We do not have to calculate a heavy and sometimes unstable path optimization since the path footprints are already inside the drivable area.
Use cases
There are two interfaces to communicate with the centerline optimizer.
Vector Map Builder Interface
Note: This function of Vector Map Builder has not been released. Please wait for a while. Currently there is no documentation about Vector Map Builder’s operation for this function.
The optimized centerline can be generated from Vector Map Builder’s operation.
We can run
- path planning server
- http server to connect path planning server and Vector Map Builder
with the following command by designating <vehicle_model>
ros2 launch autoware_static_centerline_generator run_planning_server.launch.xml vehicle_model:=<vehicle-model>
FYI, port ID of the http server is 4010 by default.
Command Line Interface
The optimized centerline can be generated from the command line interface by designating
<input-osm-path>-
<output-osm-path>(not mandatory) <start-lanelet-id>-
<start-pose>(not mandatory) <end-lanelet-id>-
<end-pose>(not mandatory) <vehicle-model>-
<goal-method>(not mandatory,path_generatororbehavior_path_planneronly) -
<lanelet-sequence>(not mandatory)
ros2 launch autoware_static_centerline_generator static_centerline_generator.launch.xml run_backgrond:=false lanelet2_input_file_path:=<input-osm-path> lanelet2_output_file_path:=<output-osm-path> start_lanelet_id:=<start-lane-id> start_pose:=<start-pose> end_lanelet_id:=<end-lane-id> end_pose:=<end-pose> vehicle_model:=<vehicle-model> goal_method:=<goal-method> lanelet_sequence:=<lanelet-sequence>
Note that <goal-method>:=behavior_path_planner is not currently supported.
The default output map path containing the optimized centerline locates /tmp/autoware_static_centerline_generator/lanelet2_map.osm.
If you want to change the output map path, you can remap the path by designating <output-osm-path>.
By specifying start-pose, goal-pose, and goal-method, the centerline from start-pose to goal-pose can be embedded.
<start-pose>, <goal-pose> are entered like [position.x, position.y, position.z, orientation.x, orientation.y, orientation.z, orientation.w] with double type.
In order to run smoothly to the goal pose, goal-method is used.
Only path_generator or behavior_path_planner can be entered for <goal_method>.
In <lanelet-sequence>, you can specify the lanelet_ids for the static centerline to be embedded like "100,101,102".
The input route must be continuous and a drivable path.
[!WARNING] If the start pose is off the center of the lane, it is necessary to manually embed a centerline that smoothly connects the start pose and the start lane in advance using VMB, etc.
Architecture
Visualization
When performing validation, launch rviz as follows.
- Gray lines indicate map information such as
laneletorstop line. - The pink and purple lines show the boundaries of the
laneletwith embedded fixed paths and the embedded static centerline themselves.- The pink and purple breaks indicate where
laneletsswitch.
- The pink and purple breaks indicate where
- The green boxes are safe footprints.
Unsafe Footprints
Optimized centerline may present the following hazards.
These can be identified using the unsafe footprints marker.
- When the footprint approaches the vehicle boundary
- When making abrupt directional changes
Footprint color changes based on distance to the boundary and the angular difference between front and rear points, with distance displayed as text.
File truncated at 100 lines see the full file
Changelog for package autoware_static_centerline_generator
0.6.0 (2026-02-14)
-
fix: unable to asign lanelet_id to centerpoint near the boundary line (#350) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline_generator): use autoware_qos_utils and add missing headers (#348)
-
refert: pr #341 fix(autoware_static_centerline_generator): update initialization of path_generator (#342) Revert "fix(autoware_static_centerline_generator): update initialization of p…" This reverts commit 69ac94a925cb498e8148eb1ed043b39dfd448b60.
-
fix(autoware_static_centerline_generator): update initialization of path_generator (#341)
- fix(autoware_static_centerline_generator): update initialization of path_generator_node
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Kazunori-Nakajima, Ryohsuke Mitsudome
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
-
feat(static_centerline): add jitter validation (#305)
- feat(static_centerline): add jitter validation
- fix: extra comment
- fix
- fix readme and comment
- fix
* fix: optimization_trajectory_based_centerline ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(static_centerline_generator): inside centerline start point in start lanelet (#274) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline): enabled input of lanelet_sequence (#299)
- feat(static_centerline): enabled input of lanelet_sequence
- pre-commit
- fix cast
- pre-commit
* fix readme ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
chore: sync files (#278)
-
Contributors: Kazunori-Nakajima, awf-autoware-bot[bot]
0.3.0 (2025-08-11)
-
fix(autoware_static_centerline_generator): fix test dependency (#285)
- fix(autoware_static_centerline_generator): fix test dependency
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
ci(build-and-test): fix ci issues (#283)
-
chore: sync files (#214)
-
fix(static_centerline_generator): do not embed a single point centerline (#271) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(autoware_static_centerline_generator): fix the name of the executable in static_centerline_generator.launch.xml (#258) fix the name of the executable in static_centerline_generator.launch.xml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/run_planning_server.launch.xml
-
- vehicle_model
- launch/static_centerline_generator.launch.xml
-
- vehicle_model [default: autoware_sample_vehicle]
- mode [default: AUTO]
- rviz [default: true]
- centerline_source [default: optimization_trajectory_base]
- lanelet2_input_file_path [default: ]
- lanelet2_output_file_path [default: /tmp/autoware_static_centerline_generator/lanelet2_map.osm]
- start_lanelet_id [default: 0]
- start_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- end_lanelet_id [default: 0]
- end_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- goal_method [default: None]
- lanelet_sequence [default: ]
- jitter_deg_threshold [default: 40]
- bag_filename [default: bag.db3]
- lanelet2_map_topic [default: /map/vector_map]
- lanelet2_map_marker_topic [default: /map/vector_map_marker]
- common_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/common.param.yaml]
- nearest_search_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/nearest_search.param.yaml]
- map_loader_param [default: $(find-pkg-share autoware_launch)/config/map/lanelet2_map_loader.param.yaml]
- behavior_path_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/behavior_path_planner.param.yaml]
- behavior_velocity_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_velocity_planner/behavior_velocity_planner.param.yaml]
- path_generator_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/path_generator/path_generator.param.yaml]
- path_smoother_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/path_smoother/elastic_band_smoother.param.yaml]
- path_optimizer_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/autoware_path_optimizer/path_optimizer.param.yaml]
- mission_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/mission_planning/mission_planner/mission_planner.param.yaml]
Messages
Plugins
Recent questions tagged autoware_static_centerline_generator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takayuki Murooka
- Kosuke Takeuchi
Authors
- Takayuki Murooka
Static Centerline Generator
Purpose
This package statically calculates the centerline satisfying path footprints inside the drivable area.
On narrow-road driving, the default centerline, which is the middle line between lanelets’ right and left boundaries, often causes path footprints outside the drivable area. To make path footprints inside the drivable area, we use online path shape optimization by the autoware_path_optimizer package.
Instead of online path shape optimization, we introduce static centerline optimization. With this static centerline optimization, we have following advantages.
- We can see the optimized centerline shape in advance.
- With the default autoware, path shape is not determined until the vehicle drives there.
- This enables offline path shape evaluation.
- We do not have to calculate a heavy and sometimes unstable path optimization since the path footprints are already inside the drivable area.
Use cases
There are two interfaces to communicate with the centerline optimizer.
Vector Map Builder Interface
Note: This function of Vector Map Builder has not been released. Please wait for a while. Currently there is no documentation about Vector Map Builder’s operation for this function.
The optimized centerline can be generated from Vector Map Builder’s operation.
We can run
- path planning server
- http server to connect path planning server and Vector Map Builder
with the following command by designating <vehicle_model>
ros2 launch autoware_static_centerline_generator run_planning_server.launch.xml vehicle_model:=<vehicle-model>
FYI, port ID of the http server is 4010 by default.
Command Line Interface
The optimized centerline can be generated from the command line interface by designating
<input-osm-path>-
<output-osm-path>(not mandatory) <start-lanelet-id>-
<start-pose>(not mandatory) <end-lanelet-id>-
<end-pose>(not mandatory) <vehicle-model>-
<goal-method>(not mandatory,path_generatororbehavior_path_planneronly) -
<lanelet-sequence>(not mandatory)
ros2 launch autoware_static_centerline_generator static_centerline_generator.launch.xml run_backgrond:=false lanelet2_input_file_path:=<input-osm-path> lanelet2_output_file_path:=<output-osm-path> start_lanelet_id:=<start-lane-id> start_pose:=<start-pose> end_lanelet_id:=<end-lane-id> end_pose:=<end-pose> vehicle_model:=<vehicle-model> goal_method:=<goal-method> lanelet_sequence:=<lanelet-sequence>
Note that <goal-method>:=behavior_path_planner is not currently supported.
The default output map path containing the optimized centerline locates /tmp/autoware_static_centerline_generator/lanelet2_map.osm.
If you want to change the output map path, you can remap the path by designating <output-osm-path>.
By specifying start-pose, goal-pose, and goal-method, the centerline from start-pose to goal-pose can be embedded.
<start-pose>, <goal-pose> are entered like [position.x, position.y, position.z, orientation.x, orientation.y, orientation.z, orientation.w] with double type.
In order to run smoothly to the goal pose, goal-method is used.
Only path_generator or behavior_path_planner can be entered for <goal_method>.
In <lanelet-sequence>, you can specify the lanelet_ids for the static centerline to be embedded like "100,101,102".
The input route must be continuous and a drivable path.
[!WARNING] If the start pose is off the center of the lane, it is necessary to manually embed a centerline that smoothly connects the start pose and the start lane in advance using VMB, etc.
Architecture
Visualization
When performing validation, launch rviz as follows.
- Gray lines indicate map information such as
laneletorstop line. - The pink and purple lines show the boundaries of the
laneletwith embedded fixed paths and the embedded static centerline themselves.- The pink and purple breaks indicate where
laneletsswitch.
- The pink and purple breaks indicate where
- The green boxes are safe footprints.
Unsafe Footprints
Optimized centerline may present the following hazards.
These can be identified using the unsafe footprints marker.
- When the footprint approaches the vehicle boundary
- When making abrupt directional changes
Footprint color changes based on distance to the boundary and the angular difference between front and rear points, with distance displayed as text.
File truncated at 100 lines see the full file
Changelog for package autoware_static_centerline_generator
0.6.0 (2026-02-14)
-
fix: unable to asign lanelet_id to centerpoint near the boundary line (#350) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline_generator): use autoware_qos_utils and add missing headers (#348)
-
refert: pr #341 fix(autoware_static_centerline_generator): update initialization of path_generator (#342) Revert "fix(autoware_static_centerline_generator): update initialization of p…" This reverts commit 69ac94a925cb498e8148eb1ed043b39dfd448b60.
-
fix(autoware_static_centerline_generator): update initialization of path_generator (#341)
- fix(autoware_static_centerline_generator): update initialization of path_generator_node
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Kazunori-Nakajima, Ryohsuke Mitsudome
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
-
feat(static_centerline): add jitter validation (#305)
- feat(static_centerline): add jitter validation
- fix: extra comment
- fix
- fix readme and comment
- fix
* fix: optimization_trajectory_based_centerline ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(static_centerline_generator): inside centerline start point in start lanelet (#274) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline): enabled input of lanelet_sequence (#299)
- feat(static_centerline): enabled input of lanelet_sequence
- pre-commit
- fix cast
- pre-commit
* fix readme ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
chore: sync files (#278)
-
Contributors: Kazunori-Nakajima, awf-autoware-bot[bot]
0.3.0 (2025-08-11)
-
fix(autoware_static_centerline_generator): fix test dependency (#285)
- fix(autoware_static_centerline_generator): fix test dependency
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
ci(build-and-test): fix ci issues (#283)
-
chore: sync files (#214)
-
fix(static_centerline_generator): do not embed a single point centerline (#271) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(autoware_static_centerline_generator): fix the name of the executable in static_centerline_generator.launch.xml (#258) fix the name of the executable in static_centerline_generator.launch.xml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/run_planning_server.launch.xml
-
- vehicle_model
- launch/static_centerline_generator.launch.xml
-
- vehicle_model [default: autoware_sample_vehicle]
- mode [default: AUTO]
- rviz [default: true]
- centerline_source [default: optimization_trajectory_base]
- lanelet2_input_file_path [default: ]
- lanelet2_output_file_path [default: /tmp/autoware_static_centerline_generator/lanelet2_map.osm]
- start_lanelet_id [default: 0]
- start_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- end_lanelet_id [default: 0]
- end_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- goal_method [default: None]
- lanelet_sequence [default: ]
- jitter_deg_threshold [default: 40]
- bag_filename [default: bag.db3]
- lanelet2_map_topic [default: /map/vector_map]
- lanelet2_map_marker_topic [default: /map/vector_map_marker]
- common_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/common.param.yaml]
- nearest_search_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/nearest_search.param.yaml]
- map_loader_param [default: $(find-pkg-share autoware_launch)/config/map/lanelet2_map_loader.param.yaml]
- behavior_path_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/behavior_path_planner.param.yaml]
- behavior_velocity_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_velocity_planner/behavior_velocity_planner.param.yaml]
- path_generator_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/path_generator/path_generator.param.yaml]
- path_smoother_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/path_smoother/elastic_band_smoother.param.yaml]
- path_optimizer_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/autoware_path_optimizer/path_optimizer.param.yaml]
- mission_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/mission_planning/mission_planner/mission_planner.param.yaml]
Messages
Plugins
Recent questions tagged autoware_static_centerline_generator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takayuki Murooka
- Kosuke Takeuchi
Authors
- Takayuki Murooka
Static Centerline Generator
Purpose
This package statically calculates the centerline satisfying path footprints inside the drivable area.
On narrow-road driving, the default centerline, which is the middle line between lanelets’ right and left boundaries, often causes path footprints outside the drivable area. To make path footprints inside the drivable area, we use online path shape optimization by the autoware_path_optimizer package.
Instead of online path shape optimization, we introduce static centerline optimization. With this static centerline optimization, we have following advantages.
- We can see the optimized centerline shape in advance.
- With the default autoware, path shape is not determined until the vehicle drives there.
- This enables offline path shape evaluation.
- We do not have to calculate a heavy and sometimes unstable path optimization since the path footprints are already inside the drivable area.
Use cases
There are two interfaces to communicate with the centerline optimizer.
Vector Map Builder Interface
Note: This function of Vector Map Builder has not been released. Please wait for a while. Currently there is no documentation about Vector Map Builder’s operation for this function.
The optimized centerline can be generated from Vector Map Builder’s operation.
We can run
- path planning server
- http server to connect path planning server and Vector Map Builder
with the following command by designating <vehicle_model>
ros2 launch autoware_static_centerline_generator run_planning_server.launch.xml vehicle_model:=<vehicle-model>
FYI, port ID of the http server is 4010 by default.
Command Line Interface
The optimized centerline can be generated from the command line interface by designating
<input-osm-path>-
<output-osm-path>(not mandatory) <start-lanelet-id>-
<start-pose>(not mandatory) <end-lanelet-id>-
<end-pose>(not mandatory) <vehicle-model>-
<goal-method>(not mandatory,path_generatororbehavior_path_planneronly) -
<lanelet-sequence>(not mandatory)
ros2 launch autoware_static_centerline_generator static_centerline_generator.launch.xml run_backgrond:=false lanelet2_input_file_path:=<input-osm-path> lanelet2_output_file_path:=<output-osm-path> start_lanelet_id:=<start-lane-id> start_pose:=<start-pose> end_lanelet_id:=<end-lane-id> end_pose:=<end-pose> vehicle_model:=<vehicle-model> goal_method:=<goal-method> lanelet_sequence:=<lanelet-sequence>
Note that <goal-method>:=behavior_path_planner is not currently supported.
The default output map path containing the optimized centerline locates /tmp/autoware_static_centerline_generator/lanelet2_map.osm.
If you want to change the output map path, you can remap the path by designating <output-osm-path>.
By specifying start-pose, goal-pose, and goal-method, the centerline from start-pose to goal-pose can be embedded.
<start-pose>, <goal-pose> are entered like [position.x, position.y, position.z, orientation.x, orientation.y, orientation.z, orientation.w] with double type.
In order to run smoothly to the goal pose, goal-method is used.
Only path_generator or behavior_path_planner can be entered for <goal_method>.
In <lanelet-sequence>, you can specify the lanelet_ids for the static centerline to be embedded like "100,101,102".
The input route must be continuous and a drivable path.
[!WARNING] If the start pose is off the center of the lane, it is necessary to manually embed a centerline that smoothly connects the start pose and the start lane in advance using VMB, etc.
Architecture
Visualization
When performing validation, launch rviz as follows.
- Gray lines indicate map information such as
laneletorstop line. - The pink and purple lines show the boundaries of the
laneletwith embedded fixed paths and the embedded static centerline themselves.- The pink and purple breaks indicate where
laneletsswitch.
- The pink and purple breaks indicate where
- The green boxes are safe footprints.
Unsafe Footprints
Optimized centerline may present the following hazards.
These can be identified using the unsafe footprints marker.
- When the footprint approaches the vehicle boundary
- When making abrupt directional changes
Footprint color changes based on distance to the boundary and the angular difference between front and rear points, with distance displayed as text.
File truncated at 100 lines see the full file
Changelog for package autoware_static_centerline_generator
0.6.0 (2026-02-14)
-
fix: unable to asign lanelet_id to centerpoint near the boundary line (#350) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline_generator): use autoware_qos_utils and add missing headers (#348)
-
refert: pr #341 fix(autoware_static_centerline_generator): update initialization of path_generator (#342) Revert "fix(autoware_static_centerline_generator): update initialization of p…" This reverts commit 69ac94a925cb498e8148eb1ed043b39dfd448b60.
-
fix(autoware_static_centerline_generator): update initialization of path_generator (#341)
- fix(autoware_static_centerline_generator): update initialization of path_generator_node
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Kazunori-Nakajima, Ryohsuke Mitsudome
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
-
feat(static_centerline): add jitter validation (#305)
- feat(static_centerline): add jitter validation
- fix: extra comment
- fix
- fix readme and comment
- fix
* fix: optimization_trajectory_based_centerline ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(static_centerline_generator): inside centerline start point in start lanelet (#274) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline): enabled input of lanelet_sequence (#299)
- feat(static_centerline): enabled input of lanelet_sequence
- pre-commit
- fix cast
- pre-commit
* fix readme ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
chore: sync files (#278)
-
Contributors: Kazunori-Nakajima, awf-autoware-bot[bot]
0.3.0 (2025-08-11)
-
fix(autoware_static_centerline_generator): fix test dependency (#285)
- fix(autoware_static_centerline_generator): fix test dependency
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
ci(build-and-test): fix ci issues (#283)
-
chore: sync files (#214)
-
fix(static_centerline_generator): do not embed a single point centerline (#271) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(autoware_static_centerline_generator): fix the name of the executable in static_centerline_generator.launch.xml (#258) fix the name of the executable in static_centerline_generator.launch.xml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/run_planning_server.launch.xml
-
- vehicle_model
- launch/static_centerline_generator.launch.xml
-
- vehicle_model [default: autoware_sample_vehicle]
- mode [default: AUTO]
- rviz [default: true]
- centerline_source [default: optimization_trajectory_base]
- lanelet2_input_file_path [default: ]
- lanelet2_output_file_path [default: /tmp/autoware_static_centerline_generator/lanelet2_map.osm]
- start_lanelet_id [default: 0]
- start_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- end_lanelet_id [default: 0]
- end_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- goal_method [default: None]
- lanelet_sequence [default: ]
- jitter_deg_threshold [default: 40]
- bag_filename [default: bag.db3]
- lanelet2_map_topic [default: /map/vector_map]
- lanelet2_map_marker_topic [default: /map/vector_map_marker]
- common_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/common.param.yaml]
- nearest_search_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/nearest_search.param.yaml]
- map_loader_param [default: $(find-pkg-share autoware_launch)/config/map/lanelet2_map_loader.param.yaml]
- behavior_path_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/behavior_path_planner.param.yaml]
- behavior_velocity_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_velocity_planner/behavior_velocity_planner.param.yaml]
- path_generator_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/path_generator/path_generator.param.yaml]
- path_smoother_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/path_smoother/elastic_band_smoother.param.yaml]
- path_optimizer_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/autoware_path_optimizer/path_optimizer.param.yaml]
- mission_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/mission_planning/mission_planner/mission_planner.param.yaml]
Messages
Plugins
Recent questions tagged autoware_static_centerline_generator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takayuki Murooka
- Kosuke Takeuchi
Authors
- Takayuki Murooka
Static Centerline Generator
Purpose
This package statically calculates the centerline satisfying path footprints inside the drivable area.
On narrow-road driving, the default centerline, which is the middle line between lanelets’ right and left boundaries, often causes path footprints outside the drivable area. To make path footprints inside the drivable area, we use online path shape optimization by the autoware_path_optimizer package.
Instead of online path shape optimization, we introduce static centerline optimization. With this static centerline optimization, we have following advantages.
- We can see the optimized centerline shape in advance.
- With the default autoware, path shape is not determined until the vehicle drives there.
- This enables offline path shape evaluation.
- We do not have to calculate a heavy and sometimes unstable path optimization since the path footprints are already inside the drivable area.
Use cases
There are two interfaces to communicate with the centerline optimizer.
Vector Map Builder Interface
Note: This function of Vector Map Builder has not been released. Please wait for a while. Currently there is no documentation about Vector Map Builder’s operation for this function.
The optimized centerline can be generated from Vector Map Builder’s operation.
We can run
- path planning server
- http server to connect path planning server and Vector Map Builder
with the following command by designating <vehicle_model>
ros2 launch autoware_static_centerline_generator run_planning_server.launch.xml vehicle_model:=<vehicle-model>
FYI, port ID of the http server is 4010 by default.
Command Line Interface
The optimized centerline can be generated from the command line interface by designating
<input-osm-path>-
<output-osm-path>(not mandatory) <start-lanelet-id>-
<start-pose>(not mandatory) <end-lanelet-id>-
<end-pose>(not mandatory) <vehicle-model>-
<goal-method>(not mandatory,path_generatororbehavior_path_planneronly) -
<lanelet-sequence>(not mandatory)
ros2 launch autoware_static_centerline_generator static_centerline_generator.launch.xml run_backgrond:=false lanelet2_input_file_path:=<input-osm-path> lanelet2_output_file_path:=<output-osm-path> start_lanelet_id:=<start-lane-id> start_pose:=<start-pose> end_lanelet_id:=<end-lane-id> end_pose:=<end-pose> vehicle_model:=<vehicle-model> goal_method:=<goal-method> lanelet_sequence:=<lanelet-sequence>
Note that <goal-method>:=behavior_path_planner is not currently supported.
The default output map path containing the optimized centerline locates /tmp/autoware_static_centerline_generator/lanelet2_map.osm.
If you want to change the output map path, you can remap the path by designating <output-osm-path>.
By specifying start-pose, goal-pose, and goal-method, the centerline from start-pose to goal-pose can be embedded.
<start-pose>, <goal-pose> are entered like [position.x, position.y, position.z, orientation.x, orientation.y, orientation.z, orientation.w] with double type.
In order to run smoothly to the goal pose, goal-method is used.
Only path_generator or behavior_path_planner can be entered for <goal_method>.
In <lanelet-sequence>, you can specify the lanelet_ids for the static centerline to be embedded like "100,101,102".
The input route must be continuous and a drivable path.
[!WARNING] If the start pose is off the center of the lane, it is necessary to manually embed a centerline that smoothly connects the start pose and the start lane in advance using VMB, etc.
Architecture
Visualization
When performing validation, launch rviz as follows.
- Gray lines indicate map information such as
laneletorstop line. - The pink and purple lines show the boundaries of the
laneletwith embedded fixed paths and the embedded static centerline themselves.- The pink and purple breaks indicate where
laneletsswitch.
- The pink and purple breaks indicate where
- The green boxes are safe footprints.
Unsafe Footprints
Optimized centerline may present the following hazards.
These can be identified using the unsafe footprints marker.
- When the footprint approaches the vehicle boundary
- When making abrupt directional changes
Footprint color changes based on distance to the boundary and the angular difference between front and rear points, with distance displayed as text.
File truncated at 100 lines see the full file
Changelog for package autoware_static_centerline_generator
0.6.0 (2026-02-14)
-
fix: unable to asign lanelet_id to centerpoint near the boundary line (#350) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline_generator): use autoware_qos_utils and add missing headers (#348)
-
refert: pr #341 fix(autoware_static_centerline_generator): update initialization of path_generator (#342) Revert "fix(autoware_static_centerline_generator): update initialization of p…" This reverts commit 69ac94a925cb498e8148eb1ed043b39dfd448b60.
-
fix(autoware_static_centerline_generator): update initialization of path_generator (#341)
- fix(autoware_static_centerline_generator): update initialization of path_generator_node
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Kazunori-Nakajima, Ryohsuke Mitsudome
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
-
feat(static_centerline): add jitter validation (#305)
- feat(static_centerline): add jitter validation
- fix: extra comment
- fix
- fix readme and comment
- fix
* fix: optimization_trajectory_based_centerline ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(static_centerline_generator): inside centerline start point in start lanelet (#274) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline): enabled input of lanelet_sequence (#299)
- feat(static_centerline): enabled input of lanelet_sequence
- pre-commit
- fix cast
- pre-commit
* fix readme ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
chore: sync files (#278)
-
Contributors: Kazunori-Nakajima, awf-autoware-bot[bot]
0.3.0 (2025-08-11)
-
fix(autoware_static_centerline_generator): fix test dependency (#285)
- fix(autoware_static_centerline_generator): fix test dependency
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
ci(build-and-test): fix ci issues (#283)
-
chore: sync files (#214)
-
fix(static_centerline_generator): do not embed a single point centerline (#271) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(autoware_static_centerline_generator): fix the name of the executable in static_centerline_generator.launch.xml (#258) fix the name of the executable in static_centerline_generator.launch.xml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/run_planning_server.launch.xml
-
- vehicle_model
- launch/static_centerline_generator.launch.xml
-
- vehicle_model [default: autoware_sample_vehicle]
- mode [default: AUTO]
- rviz [default: true]
- centerline_source [default: optimization_trajectory_base]
- lanelet2_input_file_path [default: ]
- lanelet2_output_file_path [default: /tmp/autoware_static_centerline_generator/lanelet2_map.osm]
- start_lanelet_id [default: 0]
- start_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- end_lanelet_id [default: 0]
- end_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- goal_method [default: None]
- lanelet_sequence [default: ]
- jitter_deg_threshold [default: 40]
- bag_filename [default: bag.db3]
- lanelet2_map_topic [default: /map/vector_map]
- lanelet2_map_marker_topic [default: /map/vector_map_marker]
- common_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/common.param.yaml]
- nearest_search_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/nearest_search.param.yaml]
- map_loader_param [default: $(find-pkg-share autoware_launch)/config/map/lanelet2_map_loader.param.yaml]
- behavior_path_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/behavior_path_planner.param.yaml]
- behavior_velocity_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_velocity_planner/behavior_velocity_planner.param.yaml]
- path_generator_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/path_generator/path_generator.param.yaml]
- path_smoother_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/path_smoother/elastic_band_smoother.param.yaml]
- path_optimizer_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/autoware_path_optimizer/path_optimizer.param.yaml]
- mission_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/mission_planning/mission_planner/mission_planner.param.yaml]
Messages
Plugins
Recent questions tagged autoware_static_centerline_generator at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Takayuki Murooka
- Kosuke Takeuchi
Authors
- Takayuki Murooka
Static Centerline Generator
Purpose
This package statically calculates the centerline satisfying path footprints inside the drivable area.
On narrow-road driving, the default centerline, which is the middle line between lanelets’ right and left boundaries, often causes path footprints outside the drivable area. To make path footprints inside the drivable area, we use online path shape optimization by the autoware_path_optimizer package.
Instead of online path shape optimization, we introduce static centerline optimization. With this static centerline optimization, we have following advantages.
- We can see the optimized centerline shape in advance.
- With the default autoware, path shape is not determined until the vehicle drives there.
- This enables offline path shape evaluation.
- We do not have to calculate a heavy and sometimes unstable path optimization since the path footprints are already inside the drivable area.
Use cases
There are two interfaces to communicate with the centerline optimizer.
Vector Map Builder Interface
Note: This function of Vector Map Builder has not been released. Please wait for a while. Currently there is no documentation about Vector Map Builder’s operation for this function.
The optimized centerline can be generated from Vector Map Builder’s operation.
We can run
- path planning server
- http server to connect path planning server and Vector Map Builder
with the following command by designating <vehicle_model>
ros2 launch autoware_static_centerline_generator run_planning_server.launch.xml vehicle_model:=<vehicle-model>
FYI, port ID of the http server is 4010 by default.
Command Line Interface
The optimized centerline can be generated from the command line interface by designating
<input-osm-path>-
<output-osm-path>(not mandatory) <start-lanelet-id>-
<start-pose>(not mandatory) <end-lanelet-id>-
<end-pose>(not mandatory) <vehicle-model>-
<goal-method>(not mandatory,path_generatororbehavior_path_planneronly) -
<lanelet-sequence>(not mandatory)
ros2 launch autoware_static_centerline_generator static_centerline_generator.launch.xml run_backgrond:=false lanelet2_input_file_path:=<input-osm-path> lanelet2_output_file_path:=<output-osm-path> start_lanelet_id:=<start-lane-id> start_pose:=<start-pose> end_lanelet_id:=<end-lane-id> end_pose:=<end-pose> vehicle_model:=<vehicle-model> goal_method:=<goal-method> lanelet_sequence:=<lanelet-sequence>
Note that <goal-method>:=behavior_path_planner is not currently supported.
The default output map path containing the optimized centerline locates /tmp/autoware_static_centerline_generator/lanelet2_map.osm.
If you want to change the output map path, you can remap the path by designating <output-osm-path>.
By specifying start-pose, goal-pose, and goal-method, the centerline from start-pose to goal-pose can be embedded.
<start-pose>, <goal-pose> are entered like [position.x, position.y, position.z, orientation.x, orientation.y, orientation.z, orientation.w] with double type.
In order to run smoothly to the goal pose, goal-method is used.
Only path_generator or behavior_path_planner can be entered for <goal_method>.
In <lanelet-sequence>, you can specify the lanelet_ids for the static centerline to be embedded like "100,101,102".
The input route must be continuous and a drivable path.
[!WARNING] If the start pose is off the center of the lane, it is necessary to manually embed a centerline that smoothly connects the start pose and the start lane in advance using VMB, etc.
Architecture
Visualization
When performing validation, launch rviz as follows.
- Gray lines indicate map information such as
laneletorstop line. - The pink and purple lines show the boundaries of the
laneletwith embedded fixed paths and the embedded static centerline themselves.- The pink and purple breaks indicate where
laneletsswitch.
- The pink and purple breaks indicate where
- The green boxes are safe footprints.
Unsafe Footprints
Optimized centerline may present the following hazards.
These can be identified using the unsafe footprints marker.
- When the footprint approaches the vehicle boundary
- When making abrupt directional changes
Footprint color changes based on distance to the boundary and the angular difference between front and rear points, with distance displayed as text.
File truncated at 100 lines see the full file
Changelog for package autoware_static_centerline_generator
0.6.0 (2026-02-14)
-
fix: unable to asign lanelet_id to centerpoint near the boundary line (#350) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline_generator): use autoware_qos_utils and add missing headers (#348)
-
refert: pr #341 fix(autoware_static_centerline_generator): update initialization of path_generator (#342) Revert "fix(autoware_static_centerline_generator): update initialization of p…" This reverts commit 69ac94a925cb498e8148eb1ed043b39dfd448b60.
-
fix(autoware_static_centerline_generator): update initialization of path_generator (#341)
- fix(autoware_static_centerline_generator): update initialization of path_generator_node
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
Contributors: Kazunori-Nakajima, Ryohsuke Mitsudome
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
-
feat(static_centerline): add jitter validation (#305)
- feat(static_centerline): add jitter validation
- fix: extra comment
- fix
- fix readme and comment
- fix
* fix: optimization_trajectory_based_centerline ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(static_centerline_generator): inside centerline start point in start lanelet (#274) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
feat(static_centerline): enabled input of lanelet_sequence (#299)
- feat(static_centerline): enabled input of lanelet_sequence
- pre-commit
- fix cast
- pre-commit
* fix readme ---------Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
chore: sync files (#278)
-
Contributors: Kazunori-Nakajima, awf-autoware-bot[bot]
0.3.0 (2025-08-11)
-
fix(autoware_static_centerline_generator): fix test dependency (#285)
- fix(autoware_static_centerline_generator): fix test dependency
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
ci(build-and-test): fix ci issues (#283)
-
chore: sync files (#214)
-
fix(static_centerline_generator): do not embed a single point centerline (#271) Co-authored-by: t4-adc <<grp-rd-1-adc-admin@tier4.jp>>
-
fix(autoware_static_centerline_generator): fix the name of the executable in static_centerline_generator.launch.xml (#258) fix the name of the executable in static_centerline_generator.launch.xml
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/run_planning_server.launch.xml
-
- vehicle_model
- launch/static_centerline_generator.launch.xml
-
- vehicle_model [default: autoware_sample_vehicle]
- mode [default: AUTO]
- rviz [default: true]
- centerline_source [default: optimization_trajectory_base]
- lanelet2_input_file_path [default: ]
- lanelet2_output_file_path [default: /tmp/autoware_static_centerline_generator/lanelet2_map.osm]
- start_lanelet_id [default: 0]
- start_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- end_lanelet_id [default: 0]
- end_pose [default: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]]
- goal_method [default: None]
- lanelet_sequence [default: ]
- jitter_deg_threshold [default: 40]
- bag_filename [default: bag.db3]
- lanelet2_map_topic [default: /map/vector_map]
- lanelet2_map_marker_topic [default: /map/vector_map_marker]
- common_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/common.param.yaml]
- nearest_search_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/common/nearest_search.param.yaml]
- map_loader_param [default: $(find-pkg-share autoware_launch)/config/map/lanelet2_map_loader.param.yaml]
- behavior_path_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_path_planner/behavior_path_planner.param.yaml]
- behavior_velocity_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/behavior_velocity_planner/behavior_velocity_planner.param.yaml]
- path_generator_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/behavior_planning/path_generator/path_generator.param.yaml]
- path_smoother_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/path_smoother/elastic_band_smoother.param.yaml]
- path_optimizer_param [default: $(find-pkg-share autoware_launch)/config/planning/scenario_planning/lane_driving/motion_planning/autoware_path_optimizer/path_optimizer.param.yaml]
- mission_planner_param [default: $(find-pkg-share autoware_launch)/config/planning/mission_planning/mission_planner/mission_planner.param.yaml]