
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tao Zhong
- Masato Saeki
- Yoshi Ri
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_occlusion_predictor
Overview
autoware_traffic_light_occlusion_predictor receives the detected traffic lights rois and calculates the occlusion ratios of each roi with point cloud.
If that rois is judged as occlusion, color, shape, and confidence of ~/output/traffic_signals become UNKNOWN, UNKNOWN, and 0.0.
This node publishes when each car and pedestrian traffic_signals is arrived and processed.
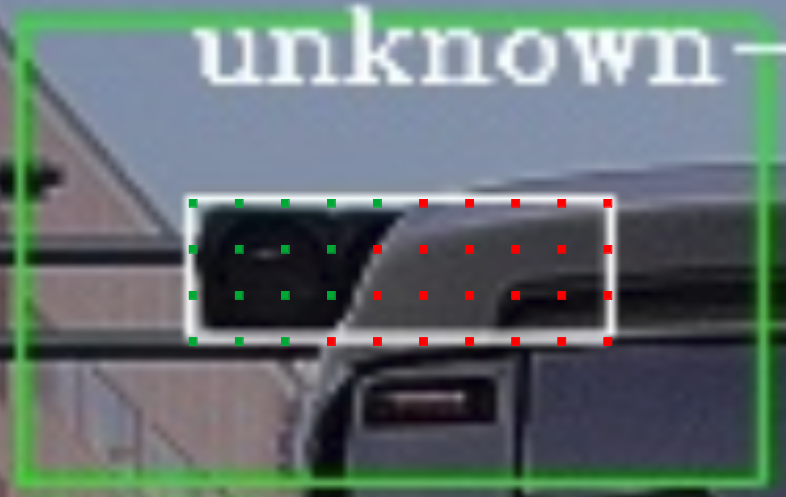
For each traffic light roi, hundreds of pixels would be selected and projected into the 3D space. Then from the camera point of view, the number of projected pixels that are occluded by the point cloud is counted and used for calculating the occlusion ratio for the roi. As shown in follow image, the red pixels are occluded and the occlusion ratio is the number of red pixels divided by the total pixel numbers.
If no point cloud is received or all point clouds have very large stamp difference with the camera image, the occlusion ratio of each roi would be set as 0.
Input topics
| Name | Type | Description |
|---|---|---|
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
~/input/car/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | vehicular traffic light signals |
~/input/pedestrian/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | pedestrian traffic light signals |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | traffic light detections |
~/input/camera_info |
sensor_msgs::msg::CameraInfo | target camera parameter |
~/input/cloud |
sensor_msgs::msg::PointCloud2 | LiDAR point cloud |
Output topics
| Name | Type | Description |
|---|---|---|
~/output/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | traffic light signals which occluded image results overwritten |
Node parameters
{{ json_to_markdown(“perception/autoware_traffic_light_occlusion_predictor/schema/traffic_light_occlusion_predictor.schema.json”) }}
Changelog for package autoware_traffic_light_occlusion_predictor
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- feat(traffic_light_occlusion_predictor): improve type safety (#11916)
- refactor(traffic_light_occlusion_predictor): rename synchronizer_ to synchronizer_car_ (#11915)
- docs(traffic_light_occlusion_predictor): add doxygen comments (#11914)
- refactor(traffic_light_occlusion_predictor): reorganize includes, remove unused (#11913)
- fix(traffic_light_occlusion_predictor): use array of bools instead (#11883)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- fix: tf2 uses hpp headers in rolling (and is backported) (#11620)
- Contributors: Ryohsuke Mitsudome, Tim Clephas
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
- Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
- chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
- Contributors: Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- Contributors: Hayato Mizushima, Yutaka Kondo
0.42.0 (2025-03-03)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
-
chore: refine maintainer list (#10110)
- chore: remove Miura from maintainer
* chore: add Taekjin-san to perception_utils package maintainer ---------
-
chore(traffic_light_occlusion_predictor): created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file (#9998)
- feat(traffic_light_occlusion_predictor): Created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_occlusion_predictor.launch.xml
-
- input/cloud [default: /sensing/lidar/concatenated/pointcloud]
- input/vector_map [default: /map/vector_map]
- input/camera_info
- input/rois
- input/car/traffic_signals
- input/pedestrian/traffic_signals
- output/traffic_signals
- param_path [default: $(find-pkg-share autoware_traffic_light_occlusion_predictor)/config/traffic_light_occlusion_predictor.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_occlusion_predictor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tao Zhong
- Masato Saeki
- Yoshi Ri
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_occlusion_predictor
Overview
autoware_traffic_light_occlusion_predictor receives the detected traffic lights rois and calculates the occlusion ratios of each roi with point cloud.
If that rois is judged as occlusion, color, shape, and confidence of ~/output/traffic_signals become UNKNOWN, UNKNOWN, and 0.0.
This node publishes when each car and pedestrian traffic_signals is arrived and processed.
For each traffic light roi, hundreds of pixels would be selected and projected into the 3D space. Then from the camera point of view, the number of projected pixels that are occluded by the point cloud is counted and used for calculating the occlusion ratio for the roi. As shown in follow image, the red pixels are occluded and the occlusion ratio is the number of red pixels divided by the total pixel numbers.
If no point cloud is received or all point clouds have very large stamp difference with the camera image, the occlusion ratio of each roi would be set as 0.
Input topics
| Name | Type | Description |
|---|---|---|
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
~/input/car/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | vehicular traffic light signals |
~/input/pedestrian/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | pedestrian traffic light signals |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | traffic light detections |
~/input/camera_info |
sensor_msgs::msg::CameraInfo | target camera parameter |
~/input/cloud |
sensor_msgs::msg::PointCloud2 | LiDAR point cloud |
Output topics
| Name | Type | Description |
|---|---|---|
~/output/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | traffic light signals which occluded image results overwritten |
Node parameters
{{ json_to_markdown(“perception/autoware_traffic_light_occlusion_predictor/schema/traffic_light_occlusion_predictor.schema.json”) }}
Changelog for package autoware_traffic_light_occlusion_predictor
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- feat(traffic_light_occlusion_predictor): improve type safety (#11916)
- refactor(traffic_light_occlusion_predictor): rename synchronizer_ to synchronizer_car_ (#11915)
- docs(traffic_light_occlusion_predictor): add doxygen comments (#11914)
- refactor(traffic_light_occlusion_predictor): reorganize includes, remove unused (#11913)
- fix(traffic_light_occlusion_predictor): use array of bools instead (#11883)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- fix: tf2 uses hpp headers in rolling (and is backported) (#11620)
- Contributors: Ryohsuke Mitsudome, Tim Clephas
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
- Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
- chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
- Contributors: Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- Contributors: Hayato Mizushima, Yutaka Kondo
0.42.0 (2025-03-03)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
-
chore: refine maintainer list (#10110)
- chore: remove Miura from maintainer
* chore: add Taekjin-san to perception_utils package maintainer ---------
-
chore(traffic_light_occlusion_predictor): created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file (#9998)
- feat(traffic_light_occlusion_predictor): Created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_occlusion_predictor.launch.xml
-
- input/cloud [default: /sensing/lidar/concatenated/pointcloud]
- input/vector_map [default: /map/vector_map]
- input/camera_info
- input/rois
- input/car/traffic_signals
- input/pedestrian/traffic_signals
- output/traffic_signals
- param_path [default: $(find-pkg-share autoware_traffic_light_occlusion_predictor)/config/traffic_light_occlusion_predictor.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_occlusion_predictor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tao Zhong
- Masato Saeki
- Yoshi Ri
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_occlusion_predictor
Overview
autoware_traffic_light_occlusion_predictor receives the detected traffic lights rois and calculates the occlusion ratios of each roi with point cloud.
If that rois is judged as occlusion, color, shape, and confidence of ~/output/traffic_signals become UNKNOWN, UNKNOWN, and 0.0.
This node publishes when each car and pedestrian traffic_signals is arrived and processed.
For each traffic light roi, hundreds of pixels would be selected and projected into the 3D space. Then from the camera point of view, the number of projected pixels that are occluded by the point cloud is counted and used for calculating the occlusion ratio for the roi. As shown in follow image, the red pixels are occluded and the occlusion ratio is the number of red pixels divided by the total pixel numbers.
If no point cloud is received or all point clouds have very large stamp difference with the camera image, the occlusion ratio of each roi would be set as 0.
Input topics
| Name | Type | Description |
|---|---|---|
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
~/input/car/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | vehicular traffic light signals |
~/input/pedestrian/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | pedestrian traffic light signals |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | traffic light detections |
~/input/camera_info |
sensor_msgs::msg::CameraInfo | target camera parameter |
~/input/cloud |
sensor_msgs::msg::PointCloud2 | LiDAR point cloud |
Output topics
| Name | Type | Description |
|---|---|---|
~/output/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | traffic light signals which occluded image results overwritten |
Node parameters
{{ json_to_markdown(“perception/autoware_traffic_light_occlusion_predictor/schema/traffic_light_occlusion_predictor.schema.json”) }}
Changelog for package autoware_traffic_light_occlusion_predictor
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- feat(traffic_light_occlusion_predictor): improve type safety (#11916)
- refactor(traffic_light_occlusion_predictor): rename synchronizer_ to synchronizer_car_ (#11915)
- docs(traffic_light_occlusion_predictor): add doxygen comments (#11914)
- refactor(traffic_light_occlusion_predictor): reorganize includes, remove unused (#11913)
- fix(traffic_light_occlusion_predictor): use array of bools instead (#11883)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- fix: tf2 uses hpp headers in rolling (and is backported) (#11620)
- Contributors: Ryohsuke Mitsudome, Tim Clephas
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
- Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
- chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
- Contributors: Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- Contributors: Hayato Mizushima, Yutaka Kondo
0.42.0 (2025-03-03)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
-
chore: refine maintainer list (#10110)
- chore: remove Miura from maintainer
* chore: add Taekjin-san to perception_utils package maintainer ---------
-
chore(traffic_light_occlusion_predictor): created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file (#9998)
- feat(traffic_light_occlusion_predictor): Created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_occlusion_predictor.launch.xml
-
- input/cloud [default: /sensing/lidar/concatenated/pointcloud]
- input/vector_map [default: /map/vector_map]
- input/camera_info
- input/rois
- input/car/traffic_signals
- input/pedestrian/traffic_signals
- output/traffic_signals
- param_path [default: $(find-pkg-share autoware_traffic_light_occlusion_predictor)/config/traffic_light_occlusion_predictor.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_occlusion_predictor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tao Zhong
- Masato Saeki
- Yoshi Ri
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_occlusion_predictor
Overview
autoware_traffic_light_occlusion_predictor receives the detected traffic lights rois and calculates the occlusion ratios of each roi with point cloud.
If that rois is judged as occlusion, color, shape, and confidence of ~/output/traffic_signals become UNKNOWN, UNKNOWN, and 0.0.
This node publishes when each car and pedestrian traffic_signals is arrived and processed.
For each traffic light roi, hundreds of pixels would be selected and projected into the 3D space. Then from the camera point of view, the number of projected pixels that are occluded by the point cloud is counted and used for calculating the occlusion ratio for the roi. As shown in follow image, the red pixels are occluded and the occlusion ratio is the number of red pixels divided by the total pixel numbers.
If no point cloud is received or all point clouds have very large stamp difference with the camera image, the occlusion ratio of each roi would be set as 0.
Input topics
| Name | Type | Description |
|---|---|---|
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
~/input/car/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | vehicular traffic light signals |
~/input/pedestrian/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | pedestrian traffic light signals |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | traffic light detections |
~/input/camera_info |
sensor_msgs::msg::CameraInfo | target camera parameter |
~/input/cloud |
sensor_msgs::msg::PointCloud2 | LiDAR point cloud |
Output topics
| Name | Type | Description |
|---|---|---|
~/output/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | traffic light signals which occluded image results overwritten |
Node parameters
{{ json_to_markdown(“perception/autoware_traffic_light_occlusion_predictor/schema/traffic_light_occlusion_predictor.schema.json”) }}
Changelog for package autoware_traffic_light_occlusion_predictor
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- feat(traffic_light_occlusion_predictor): improve type safety (#11916)
- refactor(traffic_light_occlusion_predictor): rename synchronizer_ to synchronizer_car_ (#11915)
- docs(traffic_light_occlusion_predictor): add doxygen comments (#11914)
- refactor(traffic_light_occlusion_predictor): reorganize includes, remove unused (#11913)
- fix(traffic_light_occlusion_predictor): use array of bools instead (#11883)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- fix: tf2 uses hpp headers in rolling (and is backported) (#11620)
- Contributors: Ryohsuke Mitsudome, Tim Clephas
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
- Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
- chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
- Contributors: Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- Contributors: Hayato Mizushima, Yutaka Kondo
0.42.0 (2025-03-03)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
-
chore: refine maintainer list (#10110)
- chore: remove Miura from maintainer
* chore: add Taekjin-san to perception_utils package maintainer ---------
-
chore(traffic_light_occlusion_predictor): created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file (#9998)
- feat(traffic_light_occlusion_predictor): Created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_occlusion_predictor.launch.xml
-
- input/cloud [default: /sensing/lidar/concatenated/pointcloud]
- input/vector_map [default: /map/vector_map]
- input/camera_info
- input/rois
- input/car/traffic_signals
- input/pedestrian/traffic_signals
- output/traffic_signals
- param_path [default: $(find-pkg-share autoware_traffic_light_occlusion_predictor)/config/traffic_light_occlusion_predictor.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_occlusion_predictor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tao Zhong
- Masato Saeki
- Yoshi Ri
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_occlusion_predictor
Overview
autoware_traffic_light_occlusion_predictor receives the detected traffic lights rois and calculates the occlusion ratios of each roi with point cloud.
If that rois is judged as occlusion, color, shape, and confidence of ~/output/traffic_signals become UNKNOWN, UNKNOWN, and 0.0.
This node publishes when each car and pedestrian traffic_signals is arrived and processed.
For each traffic light roi, hundreds of pixels would be selected and projected into the 3D space. Then from the camera point of view, the number of projected pixels that are occluded by the point cloud is counted and used for calculating the occlusion ratio for the roi. As shown in follow image, the red pixels are occluded and the occlusion ratio is the number of red pixels divided by the total pixel numbers.
If no point cloud is received or all point clouds have very large stamp difference with the camera image, the occlusion ratio of each roi would be set as 0.
Input topics
| Name | Type | Description |
|---|---|---|
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
~/input/car/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | vehicular traffic light signals |
~/input/pedestrian/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | pedestrian traffic light signals |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | traffic light detections |
~/input/camera_info |
sensor_msgs::msg::CameraInfo | target camera parameter |
~/input/cloud |
sensor_msgs::msg::PointCloud2 | LiDAR point cloud |
Output topics
| Name | Type | Description |
|---|---|---|
~/output/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | traffic light signals which occluded image results overwritten |
Node parameters
{{ json_to_markdown(“perception/autoware_traffic_light_occlusion_predictor/schema/traffic_light_occlusion_predictor.schema.json”) }}
Changelog for package autoware_traffic_light_occlusion_predictor
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- feat(traffic_light_occlusion_predictor): improve type safety (#11916)
- refactor(traffic_light_occlusion_predictor): rename synchronizer_ to synchronizer_car_ (#11915)
- docs(traffic_light_occlusion_predictor): add doxygen comments (#11914)
- refactor(traffic_light_occlusion_predictor): reorganize includes, remove unused (#11913)
- fix(traffic_light_occlusion_predictor): use array of bools instead (#11883)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- fix: tf2 uses hpp headers in rolling (and is backported) (#11620)
- Contributors: Ryohsuke Mitsudome, Tim Clephas
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
- Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
- chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
- Contributors: Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- Contributors: Hayato Mizushima, Yutaka Kondo
0.42.0 (2025-03-03)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
-
chore: refine maintainer list (#10110)
- chore: remove Miura from maintainer
* chore: add Taekjin-san to perception_utils package maintainer ---------
-
chore(traffic_light_occlusion_predictor): created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file (#9998)
- feat(traffic_light_occlusion_predictor): Created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_occlusion_predictor.launch.xml
-
- input/cloud [default: /sensing/lidar/concatenated/pointcloud]
- input/vector_map [default: /map/vector_map]
- input/camera_info
- input/rois
- input/car/traffic_signals
- input/pedestrian/traffic_signals
- output/traffic_signals
- param_path [default: $(find-pkg-share autoware_traffic_light_occlusion_predictor)/config/traffic_light_occlusion_predictor.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_occlusion_predictor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tao Zhong
- Masato Saeki
- Yoshi Ri
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_occlusion_predictor
Overview
autoware_traffic_light_occlusion_predictor receives the detected traffic lights rois and calculates the occlusion ratios of each roi with point cloud.
If that rois is judged as occlusion, color, shape, and confidence of ~/output/traffic_signals become UNKNOWN, UNKNOWN, and 0.0.
This node publishes when each car and pedestrian traffic_signals is arrived and processed.
For each traffic light roi, hundreds of pixels would be selected and projected into the 3D space. Then from the camera point of view, the number of projected pixels that are occluded by the point cloud is counted and used for calculating the occlusion ratio for the roi. As shown in follow image, the red pixels are occluded and the occlusion ratio is the number of red pixels divided by the total pixel numbers.
If no point cloud is received or all point clouds have very large stamp difference with the camera image, the occlusion ratio of each roi would be set as 0.
Input topics
| Name | Type | Description |
|---|---|---|
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
~/input/car/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | vehicular traffic light signals |
~/input/pedestrian/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | pedestrian traffic light signals |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | traffic light detections |
~/input/camera_info |
sensor_msgs::msg::CameraInfo | target camera parameter |
~/input/cloud |
sensor_msgs::msg::PointCloud2 | LiDAR point cloud |
Output topics
| Name | Type | Description |
|---|---|---|
~/output/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | traffic light signals which occluded image results overwritten |
Node parameters
{{ json_to_markdown(“perception/autoware_traffic_light_occlusion_predictor/schema/traffic_light_occlusion_predictor.schema.json”) }}
Changelog for package autoware_traffic_light_occlusion_predictor
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- feat(traffic_light_occlusion_predictor): improve type safety (#11916)
- refactor(traffic_light_occlusion_predictor): rename synchronizer_ to synchronizer_car_ (#11915)
- docs(traffic_light_occlusion_predictor): add doxygen comments (#11914)
- refactor(traffic_light_occlusion_predictor): reorganize includes, remove unused (#11913)
- fix(traffic_light_occlusion_predictor): use array of bools instead (#11883)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- fix: tf2 uses hpp headers in rolling (and is backported) (#11620)
- Contributors: Ryohsuke Mitsudome, Tim Clephas
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
- Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
- chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
- Contributors: Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- Contributors: Hayato Mizushima, Yutaka Kondo
0.42.0 (2025-03-03)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
-
chore: refine maintainer list (#10110)
- chore: remove Miura from maintainer
* chore: add Taekjin-san to perception_utils package maintainer ---------
-
chore(traffic_light_occlusion_predictor): created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file (#9998)
- feat(traffic_light_occlusion_predictor): Created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_occlusion_predictor.launch.xml
-
- input/cloud [default: /sensing/lidar/concatenated/pointcloud]
- input/vector_map [default: /map/vector_map]
- input/camera_info
- input/rois
- input/car/traffic_signals
- input/pedestrian/traffic_signals
- output/traffic_signals
- param_path [default: $(find-pkg-share autoware_traffic_light_occlusion_predictor)/config/traffic_light_occlusion_predictor.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_occlusion_predictor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tao Zhong
- Masato Saeki
- Yoshi Ri
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_occlusion_predictor
Overview
autoware_traffic_light_occlusion_predictor receives the detected traffic lights rois and calculates the occlusion ratios of each roi with point cloud.
If that rois is judged as occlusion, color, shape, and confidence of ~/output/traffic_signals become UNKNOWN, UNKNOWN, and 0.0.
This node publishes when each car and pedestrian traffic_signals is arrived and processed.
For each traffic light roi, hundreds of pixels would be selected and projected into the 3D space. Then from the camera point of view, the number of projected pixels that are occluded by the point cloud is counted and used for calculating the occlusion ratio for the roi. As shown in follow image, the red pixels are occluded and the occlusion ratio is the number of red pixels divided by the total pixel numbers.
If no point cloud is received or all point clouds have very large stamp difference with the camera image, the occlusion ratio of each roi would be set as 0.
Input topics
| Name | Type | Description |
|---|---|---|
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
~/input/car/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | vehicular traffic light signals |
~/input/pedestrian/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | pedestrian traffic light signals |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | traffic light detections |
~/input/camera_info |
sensor_msgs::msg::CameraInfo | target camera parameter |
~/input/cloud |
sensor_msgs::msg::PointCloud2 | LiDAR point cloud |
Output topics
| Name | Type | Description |
|---|---|---|
~/output/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | traffic light signals which occluded image results overwritten |
Node parameters
{{ json_to_markdown(“perception/autoware_traffic_light_occlusion_predictor/schema/traffic_light_occlusion_predictor.schema.json”) }}
Changelog for package autoware_traffic_light_occlusion_predictor
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- feat(traffic_light_occlusion_predictor): improve type safety (#11916)
- refactor(traffic_light_occlusion_predictor): rename synchronizer_ to synchronizer_car_ (#11915)
- docs(traffic_light_occlusion_predictor): add doxygen comments (#11914)
- refactor(traffic_light_occlusion_predictor): reorganize includes, remove unused (#11913)
- fix(traffic_light_occlusion_predictor): use array of bools instead (#11883)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- fix: tf2 uses hpp headers in rolling (and is backported) (#11620)
- Contributors: Ryohsuke Mitsudome, Tim Clephas
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
- Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
- chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
- Contributors: Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- Contributors: Hayato Mizushima, Yutaka Kondo
0.42.0 (2025-03-03)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
-
chore: refine maintainer list (#10110)
- chore: remove Miura from maintainer
* chore: add Taekjin-san to perception_utils package maintainer ---------
-
chore(traffic_light_occlusion_predictor): created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file (#9998)
- feat(traffic_light_occlusion_predictor): Created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_occlusion_predictor.launch.xml
-
- input/cloud [default: /sensing/lidar/concatenated/pointcloud]
- input/vector_map [default: /map/vector_map]
- input/camera_info
- input/rois
- input/car/traffic_signals
- input/pedestrian/traffic_signals
- output/traffic_signals
- param_path [default: $(find-pkg-share autoware_traffic_light_occlusion_predictor)/config/traffic_light_occlusion_predictor.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_occlusion_predictor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tao Zhong
- Masato Saeki
- Yoshi Ri
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_occlusion_predictor
Overview
autoware_traffic_light_occlusion_predictor receives the detected traffic lights rois and calculates the occlusion ratios of each roi with point cloud.
If that rois is judged as occlusion, color, shape, and confidence of ~/output/traffic_signals become UNKNOWN, UNKNOWN, and 0.0.
This node publishes when each car and pedestrian traffic_signals is arrived and processed.
For each traffic light roi, hundreds of pixels would be selected and projected into the 3D space. Then from the camera point of view, the number of projected pixels that are occluded by the point cloud is counted and used for calculating the occlusion ratio for the roi. As shown in follow image, the red pixels are occluded and the occlusion ratio is the number of red pixels divided by the total pixel numbers.
If no point cloud is received or all point clouds have very large stamp difference with the camera image, the occlusion ratio of each roi would be set as 0.
Input topics
| Name | Type | Description |
|---|---|---|
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
~/input/car/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | vehicular traffic light signals |
~/input/pedestrian/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | pedestrian traffic light signals |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | traffic light detections |
~/input/camera_info |
sensor_msgs::msg::CameraInfo | target camera parameter |
~/input/cloud |
sensor_msgs::msg::PointCloud2 | LiDAR point cloud |
Output topics
| Name | Type | Description |
|---|---|---|
~/output/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | traffic light signals which occluded image results overwritten |
Node parameters
{{ json_to_markdown(“perception/autoware_traffic_light_occlusion_predictor/schema/traffic_light_occlusion_predictor.schema.json”) }}
Changelog for package autoware_traffic_light_occlusion_predictor
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- feat(traffic_light_occlusion_predictor): improve type safety (#11916)
- refactor(traffic_light_occlusion_predictor): rename synchronizer_ to synchronizer_car_ (#11915)
- docs(traffic_light_occlusion_predictor): add doxygen comments (#11914)
- refactor(traffic_light_occlusion_predictor): reorganize includes, remove unused (#11913)
- fix(traffic_light_occlusion_predictor): use array of bools instead (#11883)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- fix: tf2 uses hpp headers in rolling (and is backported) (#11620)
- Contributors: Ryohsuke Mitsudome, Tim Clephas
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
- Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
- chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
- Contributors: Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- Contributors: Hayato Mizushima, Yutaka Kondo
0.42.0 (2025-03-03)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
-
chore: refine maintainer list (#10110)
- chore: remove Miura from maintainer
* chore: add Taekjin-san to perception_utils package maintainer ---------
-
chore(traffic_light_occlusion_predictor): created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file (#9998)
- feat(traffic_light_occlusion_predictor): Created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_occlusion_predictor.launch.xml
-
- input/cloud [default: /sensing/lidar/concatenated/pointcloud]
- input/vector_map [default: /map/vector_map]
- input/camera_info
- input/rois
- input/car/traffic_signals
- input/pedestrian/traffic_signals
- output/traffic_signals
- param_path [default: $(find-pkg-share autoware_traffic_light_occlusion_predictor)/config/traffic_light_occlusion_predictor.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_occlusion_predictor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-03-18 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Tao Zhong
- Masato Saeki
- Yoshi Ri
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_occlusion_predictor
Overview
autoware_traffic_light_occlusion_predictor receives the detected traffic lights rois and calculates the occlusion ratios of each roi with point cloud.
If that rois is judged as occlusion, color, shape, and confidence of ~/output/traffic_signals become UNKNOWN, UNKNOWN, and 0.0.
This node publishes when each car and pedestrian traffic_signals is arrived and processed.
For each traffic light roi, hundreds of pixels would be selected and projected into the 3D space. Then from the camera point of view, the number of projected pixels that are occluded by the point cloud is counted and used for calculating the occlusion ratio for the roi. As shown in follow image, the red pixels are occluded and the occlusion ratio is the number of red pixels divided by the total pixel numbers.
If no point cloud is received or all point clouds have very large stamp difference with the camera image, the occlusion ratio of each roi would be set as 0.
Input topics
| Name | Type | Description |
|---|---|---|
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
~/input/car/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | vehicular traffic light signals |
~/input/pedestrian/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | pedestrian traffic light signals |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | traffic light detections |
~/input/camera_info |
sensor_msgs::msg::CameraInfo | target camera parameter |
~/input/cloud |
sensor_msgs::msg::PointCloud2 | LiDAR point cloud |
Output topics
| Name | Type | Description |
|---|---|---|
~/output/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | traffic light signals which occluded image results overwritten |
Node parameters
{{ json_to_markdown(“perception/autoware_traffic_light_occlusion_predictor/schema/traffic_light_occlusion_predictor.schema.json”) }}
Changelog for package autoware_traffic_light_occlusion_predictor
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- feat(traffic_light_occlusion_predictor): improve type safety (#11916)
- refactor(traffic_light_occlusion_predictor): rename synchronizer_ to synchronizer_car_ (#11915)
- docs(traffic_light_occlusion_predictor): add doxygen comments (#11914)
- refactor(traffic_light_occlusion_predictor): reorganize includes, remove unused (#11913)
- fix(traffic_light_occlusion_predictor): use array of bools instead (#11883)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- fix: tf2 uses hpp headers in rolling (and is backported) (#11620)
- Contributors: Ryohsuke Mitsudome, Tim Clephas
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
- Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
- chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
- Contributors: Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- Contributors: Hayato Mizushima, Yutaka Kondo
0.42.0 (2025-03-03)
-
Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
-
feat(autoware_utils): replace autoware_universe_utils with autoware_utils (#10191)
-
chore: refine maintainer list (#10110)
- chore: remove Miura from maintainer
* chore: add Taekjin-san to perception_utils package maintainer ---------
-
chore(traffic_light_occlusion_predictor): created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file (#9998)
- feat(traffic_light_occlusion_predictor): Created Schema file and updated ReadME file for parameters setting and deleted default parameter from the node.cpp file
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_occlusion_predictor.launch.xml
-
- input/cloud [default: /sensing/lidar/concatenated/pointcloud]
- input/vector_map [default: /map/vector_map]
- input/camera_info
- input/rois
- input/car/traffic_signals
- input/pedestrian/traffic_signals
- output/traffic_signals
- param_path [default: $(find-pkg-share autoware_traffic_light_occlusion_predictor)/config/traffic_light_occlusion_predictor.param.yaml]