
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
- Tao Zhong
- Masato Saeki
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_visualization
Purpose
The autoware_traffic_light_visualization is a package that includes two visualizing nodes:
traffic_light_map_visualizer
The node shows traffic light’s color and position on rviz as markers.

- The estimated traffic light color is visualized using map information like the traffic light at the center of the image.
- May not be possible to visualize without information on each of the lights (light_bulbs) at the traffic lights.
traffic_light_roi_visualizer
The node draws the result of traffic light recognition on the input image as shown in the following figure and publishes it.
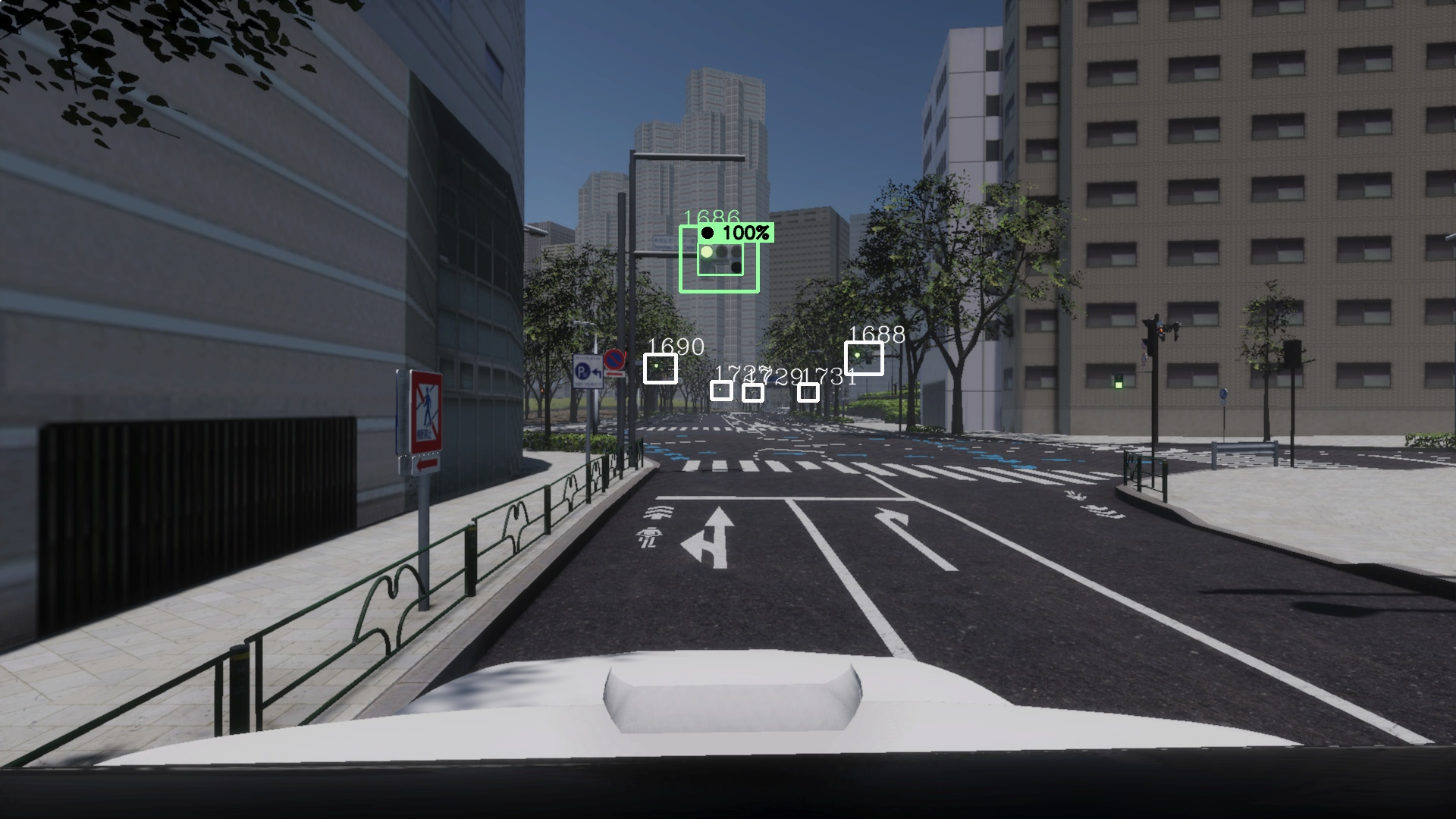
- The colors
~/input/roisand~/input/rough/roisare the same ascolorwhoseshapeis CIRCLE in~/input/traffic_signals(unknown shows as white). - The labels in the upper left of
~/input/roisshowsshapeandconfidencein~/input/traffic_signals. - The type of
shapeshould be referred to images directory. There are only 3 types of arrows in the image, but they can represent 8 directions.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
autoware_perception_msgs::msg::TrafficLightGroupArray | status of traffic lights |
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray | marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | status of traffic lights |
~/input/image |
sensor_msgs::msg::Image | the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image | output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
{{json_to_markdown(“perception/autoware_traffic_light_visualization/schema/traffic_light_roi_visualizer.schema.json”)}}
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Changelog for package autoware_traffic_light_visualization
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- fix: add missing ament_index_cpp dependency (#11875)
- fix: add cv_bridge.hpp support (#11873)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
- style(pre-commit): update to clang-format-20 (#11088) Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- Contributors: Mete Fatih Cırıt
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
-
Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
-
chore(autoware_traffic_light_visualization): modify docs (#10345)
- fix docs
- style(pre-commit): autofix
- add images of docs
- fix path in json
* fix typo ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
-
Contributors: Masato Saeki, Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
-
Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
-
chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
-
chore(perception): refactor perception launch (#10186)
- fundamental change
- style(pre-commit): autofix
- fix typo
- fix params and modify some packages
- pre-commit
- fix
- fix spell check
- fix typo
- integrate model and label path
- style(pre-commit): autofix
- for pre-commit
- run pre-commit
- for awsim
- for simulatior
- style(pre-commit): autofix
- fix grammer in launcher
- add schema for yolox_tlr
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- use_high_accuracy_detection [default: true]
- use_image_transport [default: true]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
- Tao Zhong
- Masato Saeki
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_visualization
Purpose
The autoware_traffic_light_visualization is a package that includes two visualizing nodes:
traffic_light_map_visualizer
The node shows traffic light’s color and position on rviz as markers.
- The estimated traffic light color is visualized using map information like the traffic light at the center of the image.
- May not be possible to visualize without information on each of the lights (light_bulbs) at the traffic lights.
traffic_light_roi_visualizer
The node draws the result of traffic light recognition on the input image as shown in the following figure and publishes it.
- The colors
~/input/roisand~/input/rough/roisare the same ascolorwhoseshapeis CIRCLE in~/input/traffic_signals(unknown shows as white). - The labels in the upper left of
~/input/roisshowsshapeandconfidencein~/input/traffic_signals. - The type of
shapeshould be referred to images directory. There are only 3 types of arrows in the image, but they can represent 8 directions.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
autoware_perception_msgs::msg::TrafficLightGroupArray | status of traffic lights |
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray | marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | status of traffic lights |
~/input/image |
sensor_msgs::msg::Image | the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image | output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
{{json_to_markdown(“perception/autoware_traffic_light_visualization/schema/traffic_light_roi_visualizer.schema.json”)}}
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Changelog for package autoware_traffic_light_visualization
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- fix: add missing ament_index_cpp dependency (#11875)
- fix: add cv_bridge.hpp support (#11873)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
- style(pre-commit): update to clang-format-20 (#11088) Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- Contributors: Mete Fatih Cırıt
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
-
Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
-
chore(autoware_traffic_light_visualization): modify docs (#10345)
- fix docs
- style(pre-commit): autofix
- add images of docs
- fix path in json
* fix typo ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
-
Contributors: Masato Saeki, Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
-
Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
-
chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
-
chore(perception): refactor perception launch (#10186)
- fundamental change
- style(pre-commit): autofix
- fix typo
- fix params and modify some packages
- pre-commit
- fix
- fix spell check
- fix typo
- integrate model and label path
- style(pre-commit): autofix
- for pre-commit
- run pre-commit
- for awsim
- for simulatior
- style(pre-commit): autofix
- fix grammer in launcher
- add schema for yolox_tlr
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- use_high_accuracy_detection [default: true]
- use_image_transport [default: true]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
- Tao Zhong
- Masato Saeki
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_visualization
Purpose
The autoware_traffic_light_visualization is a package that includes two visualizing nodes:
traffic_light_map_visualizer
The node shows traffic light’s color and position on rviz as markers.
- The estimated traffic light color is visualized using map information like the traffic light at the center of the image.
- May not be possible to visualize without information on each of the lights (light_bulbs) at the traffic lights.
traffic_light_roi_visualizer
The node draws the result of traffic light recognition on the input image as shown in the following figure and publishes it.
- The colors
~/input/roisand~/input/rough/roisare the same ascolorwhoseshapeis CIRCLE in~/input/traffic_signals(unknown shows as white). - The labels in the upper left of
~/input/roisshowsshapeandconfidencein~/input/traffic_signals. - The type of
shapeshould be referred to images directory. There are only 3 types of arrows in the image, but they can represent 8 directions.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
autoware_perception_msgs::msg::TrafficLightGroupArray | status of traffic lights |
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray | marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | status of traffic lights |
~/input/image |
sensor_msgs::msg::Image | the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image | output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
{{json_to_markdown(“perception/autoware_traffic_light_visualization/schema/traffic_light_roi_visualizer.schema.json”)}}
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Changelog for package autoware_traffic_light_visualization
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- fix: add missing ament_index_cpp dependency (#11875)
- fix: add cv_bridge.hpp support (#11873)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
- style(pre-commit): update to clang-format-20 (#11088) Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- Contributors: Mete Fatih Cırıt
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
-
Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
-
chore(autoware_traffic_light_visualization): modify docs (#10345)
- fix docs
- style(pre-commit): autofix
- add images of docs
- fix path in json
* fix typo ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
-
Contributors: Masato Saeki, Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
-
Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
-
chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
-
chore(perception): refactor perception launch (#10186)
- fundamental change
- style(pre-commit): autofix
- fix typo
- fix params and modify some packages
- pre-commit
- fix
- fix spell check
- fix typo
- integrate model and label path
- style(pre-commit): autofix
- for pre-commit
- run pre-commit
- for awsim
- for simulatior
- style(pre-commit): autofix
- fix grammer in launcher
- add schema for yolox_tlr
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- use_high_accuracy_detection [default: true]
- use_image_transport [default: true]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
- Tao Zhong
- Masato Saeki
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_visualization
Purpose
The autoware_traffic_light_visualization is a package that includes two visualizing nodes:
traffic_light_map_visualizer
The node shows traffic light’s color and position on rviz as markers.
- The estimated traffic light color is visualized using map information like the traffic light at the center of the image.
- May not be possible to visualize without information on each of the lights (light_bulbs) at the traffic lights.
traffic_light_roi_visualizer
The node draws the result of traffic light recognition on the input image as shown in the following figure and publishes it.
- The colors
~/input/roisand~/input/rough/roisare the same ascolorwhoseshapeis CIRCLE in~/input/traffic_signals(unknown shows as white). - The labels in the upper left of
~/input/roisshowsshapeandconfidencein~/input/traffic_signals. - The type of
shapeshould be referred to images directory. There are only 3 types of arrows in the image, but they can represent 8 directions.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
autoware_perception_msgs::msg::TrafficLightGroupArray | status of traffic lights |
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray | marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | status of traffic lights |
~/input/image |
sensor_msgs::msg::Image | the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image | output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
{{json_to_markdown(“perception/autoware_traffic_light_visualization/schema/traffic_light_roi_visualizer.schema.json”)}}
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Changelog for package autoware_traffic_light_visualization
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- fix: add missing ament_index_cpp dependency (#11875)
- fix: add cv_bridge.hpp support (#11873)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
- style(pre-commit): update to clang-format-20 (#11088) Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- Contributors: Mete Fatih Cırıt
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
-
Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
-
chore(autoware_traffic_light_visualization): modify docs (#10345)
- fix docs
- style(pre-commit): autofix
- add images of docs
- fix path in json
* fix typo ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
-
Contributors: Masato Saeki, Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
-
Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
-
chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
-
chore(perception): refactor perception launch (#10186)
- fundamental change
- style(pre-commit): autofix
- fix typo
- fix params and modify some packages
- pre-commit
- fix
- fix spell check
- fix typo
- integrate model and label path
- style(pre-commit): autofix
- for pre-commit
- run pre-commit
- for awsim
- for simulatior
- style(pre-commit): autofix
- fix grammer in launcher
- add schema for yolox_tlr
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- use_high_accuracy_detection [default: true]
- use_image_transport [default: true]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
- Tao Zhong
- Masato Saeki
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_visualization
Purpose
The autoware_traffic_light_visualization is a package that includes two visualizing nodes:
traffic_light_map_visualizer
The node shows traffic light’s color and position on rviz as markers.
- The estimated traffic light color is visualized using map information like the traffic light at the center of the image.
- May not be possible to visualize without information on each of the lights (light_bulbs) at the traffic lights.
traffic_light_roi_visualizer
The node draws the result of traffic light recognition on the input image as shown in the following figure and publishes it.
- The colors
~/input/roisand~/input/rough/roisare the same ascolorwhoseshapeis CIRCLE in~/input/traffic_signals(unknown shows as white). - The labels in the upper left of
~/input/roisshowsshapeandconfidencein~/input/traffic_signals. - The type of
shapeshould be referred to images directory. There are only 3 types of arrows in the image, but they can represent 8 directions.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
autoware_perception_msgs::msg::TrafficLightGroupArray | status of traffic lights |
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray | marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | status of traffic lights |
~/input/image |
sensor_msgs::msg::Image | the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image | output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
{{json_to_markdown(“perception/autoware_traffic_light_visualization/schema/traffic_light_roi_visualizer.schema.json”)}}
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Changelog for package autoware_traffic_light_visualization
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- fix: add missing ament_index_cpp dependency (#11875)
- fix: add cv_bridge.hpp support (#11873)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
- style(pre-commit): update to clang-format-20 (#11088) Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- Contributors: Mete Fatih Cırıt
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
-
Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
-
chore(autoware_traffic_light_visualization): modify docs (#10345)
- fix docs
- style(pre-commit): autofix
- add images of docs
- fix path in json
* fix typo ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
-
Contributors: Masato Saeki, Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
-
Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
-
chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
-
chore(perception): refactor perception launch (#10186)
- fundamental change
- style(pre-commit): autofix
- fix typo
- fix params and modify some packages
- pre-commit
- fix
- fix spell check
- fix typo
- integrate model and label path
- style(pre-commit): autofix
- for pre-commit
- run pre-commit
- for awsim
- for simulatior
- style(pre-commit): autofix
- fix grammer in launcher
- add schema for yolox_tlr
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- use_high_accuracy_detection [default: true]
- use_image_transport [default: true]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
- Tao Zhong
- Masato Saeki
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_visualization
Purpose
The autoware_traffic_light_visualization is a package that includes two visualizing nodes:
traffic_light_map_visualizer
The node shows traffic light’s color and position on rviz as markers.
- The estimated traffic light color is visualized using map information like the traffic light at the center of the image.
- May not be possible to visualize without information on each of the lights (light_bulbs) at the traffic lights.
traffic_light_roi_visualizer
The node draws the result of traffic light recognition on the input image as shown in the following figure and publishes it.
- The colors
~/input/roisand~/input/rough/roisare the same ascolorwhoseshapeis CIRCLE in~/input/traffic_signals(unknown shows as white). - The labels in the upper left of
~/input/roisshowsshapeandconfidencein~/input/traffic_signals. - The type of
shapeshould be referred to images directory. There are only 3 types of arrows in the image, but they can represent 8 directions.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
autoware_perception_msgs::msg::TrafficLightGroupArray | status of traffic lights |
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray | marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | status of traffic lights |
~/input/image |
sensor_msgs::msg::Image | the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image | output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
{{json_to_markdown(“perception/autoware_traffic_light_visualization/schema/traffic_light_roi_visualizer.schema.json”)}}
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Changelog for package autoware_traffic_light_visualization
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- fix: add missing ament_index_cpp dependency (#11875)
- fix: add cv_bridge.hpp support (#11873)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
- style(pre-commit): update to clang-format-20 (#11088) Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- Contributors: Mete Fatih Cırıt
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
-
Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
-
chore(autoware_traffic_light_visualization): modify docs (#10345)
- fix docs
- style(pre-commit): autofix
- add images of docs
- fix path in json
* fix typo ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
-
Contributors: Masato Saeki, Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
-
Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
-
chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
-
chore(perception): refactor perception launch (#10186)
- fundamental change
- style(pre-commit): autofix
- fix typo
- fix params and modify some packages
- pre-commit
- fix
- fix spell check
- fix typo
- integrate model and label path
- style(pre-commit): autofix
- for pre-commit
- run pre-commit
- for awsim
- for simulatior
- style(pre-commit): autofix
- fix grammer in launcher
- add schema for yolox_tlr
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- use_high_accuracy_detection [default: true]
- use_image_transport [default: true]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
- Tao Zhong
- Masato Saeki
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_visualization
Purpose
The autoware_traffic_light_visualization is a package that includes two visualizing nodes:
traffic_light_map_visualizer
The node shows traffic light’s color and position on rviz as markers.
- The estimated traffic light color is visualized using map information like the traffic light at the center of the image.
- May not be possible to visualize without information on each of the lights (light_bulbs) at the traffic lights.
traffic_light_roi_visualizer
The node draws the result of traffic light recognition on the input image as shown in the following figure and publishes it.
- The colors
~/input/roisand~/input/rough/roisare the same ascolorwhoseshapeis CIRCLE in~/input/traffic_signals(unknown shows as white). - The labels in the upper left of
~/input/roisshowsshapeandconfidencein~/input/traffic_signals. - The type of
shapeshould be referred to images directory. There are only 3 types of arrows in the image, but they can represent 8 directions.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
autoware_perception_msgs::msg::TrafficLightGroupArray | status of traffic lights |
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray | marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | status of traffic lights |
~/input/image |
sensor_msgs::msg::Image | the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image | output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
{{json_to_markdown(“perception/autoware_traffic_light_visualization/schema/traffic_light_roi_visualizer.schema.json”)}}
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Changelog for package autoware_traffic_light_visualization
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- fix: add missing ament_index_cpp dependency (#11875)
- fix: add cv_bridge.hpp support (#11873)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
- style(pre-commit): update to clang-format-20 (#11088) Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- Contributors: Mete Fatih Cırıt
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
-
Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
-
chore(autoware_traffic_light_visualization): modify docs (#10345)
- fix docs
- style(pre-commit): autofix
- add images of docs
- fix path in json
* fix typo ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
-
Contributors: Masato Saeki, Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
-
Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
-
chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
-
chore(perception): refactor perception launch (#10186)
- fundamental change
- style(pre-commit): autofix
- fix typo
- fix params and modify some packages
- pre-commit
- fix
- fix spell check
- fix typo
- integrate model and label path
- style(pre-commit): autofix
- for pre-commit
- run pre-commit
- for awsim
- for simulatior
- style(pre-commit): autofix
- fix grammer in launcher
- add schema for yolox_tlr
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- use_high_accuracy_detection [default: true]
- use_image_transport [default: true]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
- Tao Zhong
- Masato Saeki
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_visualization
Purpose
The autoware_traffic_light_visualization is a package that includes two visualizing nodes:
traffic_light_map_visualizer
The node shows traffic light’s color and position on rviz as markers.
- The estimated traffic light color is visualized using map information like the traffic light at the center of the image.
- May not be possible to visualize without information on each of the lights (light_bulbs) at the traffic lights.
traffic_light_roi_visualizer
The node draws the result of traffic light recognition on the input image as shown in the following figure and publishes it.
- The colors
~/input/roisand~/input/rough/roisare the same ascolorwhoseshapeis CIRCLE in~/input/traffic_signals(unknown shows as white). - The labels in the upper left of
~/input/roisshowsshapeandconfidencein~/input/traffic_signals. - The type of
shapeshould be referred to images directory. There are only 3 types of arrows in the image, but they can represent 8 directions.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
autoware_perception_msgs::msg::TrafficLightGroupArray | status of traffic lights |
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray | marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | status of traffic lights |
~/input/image |
sensor_msgs::msg::Image | the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image | output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
{{json_to_markdown(“perception/autoware_traffic_light_visualization/schema/traffic_light_roi_visualizer.schema.json”)}}
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Changelog for package autoware_traffic_light_visualization
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- fix: add missing ament_index_cpp dependency (#11875)
- fix: add cv_bridge.hpp support (#11873)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
- style(pre-commit): update to clang-format-20 (#11088) Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- Contributors: Mete Fatih Cırıt
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
-
Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
-
chore(autoware_traffic_light_visualization): modify docs (#10345)
- fix docs
- style(pre-commit): autofix
- add images of docs
- fix path in json
* fix typo ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
-
Contributors: Masato Saeki, Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
-
Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
-
chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
-
chore(perception): refactor perception launch (#10186)
- fundamental change
- style(pre-commit): autofix
- fix typo
- fix params and modify some packages
- pre-commit
- fix
- fix spell check
- fix typo
- integrate model and label path
- style(pre-commit): autofix
- for pre-commit
- run pre-commit
- for awsim
- for simulatior
- style(pre-commit): autofix
- fix grammer in launcher
- add schema for yolox_tlr
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- use_high_accuracy_detection [default: true]
- use_image_transport [default: true]
Messages
Services
Plugins
Recent questions tagged autoware_traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
- Tao Zhong
- Masato Saeki
- Taekjin Lee
- Masaki Baba
Authors
autoware_traffic_light_visualization
Purpose
The autoware_traffic_light_visualization is a package that includes two visualizing nodes:
traffic_light_map_visualizer
The node shows traffic light’s color and position on rviz as markers.
- The estimated traffic light color is visualized using map information like the traffic light at the center of the image.
- May not be possible to visualize without information on each of the lights (light_bulbs) at the traffic lights.
traffic_light_roi_visualizer
The node draws the result of traffic light recognition on the input image as shown in the following figure and publishes it.
- The colors
~/input/roisand~/input/rough/roisare the same ascolorwhoseshapeis CIRCLE in~/input/traffic_signals(unknown shows as white). - The labels in the upper left of
~/input/roisshowsshapeandconfidencein~/input/traffic_signals. - The type of
shapeshould be referred to images directory. There are only 3 types of arrows in the image, but they can represent 8 directions.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
autoware_perception_msgs::msg::TrafficLightGroupArray | status of traffic lights |
~/input/vector_map |
autoware_map_msgs::msg::LaneletMapBin | vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray | marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/traffic_signals |
tier4_perception_msgs::msg::TrafficLightArray | status of traffic lights |
~/input/image |
sensor_msgs::msg::Image | the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray | the ROIs detected by autoware_traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image | output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
{{json_to_markdown(“perception/autoware_traffic_light_visualization/schema/traffic_light_roi_visualizer.schema.json”)}}
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Changelog for package autoware_traffic_light_visualization
0.50.0 (2026-02-14)
- Merge remote-tracking branch 'origin/main' into humble
- fix: add missing ament_index_cpp dependency (#11875)
- fix: add cv_bridge.hpp support (#11873)
- Contributors: Mete Fatih Cırıt, Ryohsuke Mitsudome
0.49.0 (2025-12-30)
-
Merge remote-tracking branch 'origin/main' into prepare-0.49.0-changelog
-
feat(autoware_lanelet2_utils): replace from/toBinMsg (Sensing, Visualization and Perception Component) (#11785)
- perception component toBinMsg replacement
- visualization component fromBinMsg replacement
- sensing component fromBinMsg replacement
* perception component fromBinMsg replacement ---------
-
Contributors: Ryohsuke Mitsudome, Sarun MUKDAPITAK
0.48.0 (2025-11-18)
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
- style(pre-commit): update to clang-format-20 (#11088) Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- Contributors: Mete Fatih Cırıt
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
-
Merge remote-tracking branch 'origin/main' into tmp/notbot/bump_version_base
-
chore(autoware_traffic_light_visualization): modify docs (#10345)
- fix docs
- style(pre-commit): autofix
- add images of docs
- fix path in json
* fix typo ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: update traffic light packages code owner (#10644) chore: add Taekjin Lee as maintainer to multiple perception packages
-
Contributors: Masato Saeki, Taekjin LEE, TaikiYamada4
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
-
Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
-
chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
-
chore(perception): refactor perception launch (#10186)
- fundamental change
- style(pre-commit): autofix
- fix typo
- fix params and modify some packages
- pre-commit
- fix
- fix spell check
- fix typo
- integrate model and label path
- style(pre-commit): autofix
- for pre-commit
- run pre-commit
- for awsim
- for simulatior
- style(pre-commit): autofix
- fix grammer in launcher
- add schema for yolox_tlr
- style(pre-commit): autofix
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| tier4_perception_launch |
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- use_high_accuracy_detection [default: true]
- use_image_transport [default: true]