
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Masayuki Aino
- Asei Inoue
- Toru Hishinuma
- Kosuke Takeuchi
- Takamasa Horibe
- Takayuki Murooka
Authors
Control data collecting tool
This package provides tools for automatically collecting data using pure pursuit control within a specified rectangular area.
Overview
- This package aims to collect a dataset consisting of control inputs (i.e.
control_cmd) and observation variables (i.e.kinematic_state,steering_status, etc). - The collected dataset can be used as training dataset for learning-based controllers, including smart_mpc.
- Data collecting approach is as follows:
- Following the trajectory using a pure pursuit control law.
- Adding noises to the trajectory and the control command for data diversity, improving the prediction accuracy of learning model.
- Setting the trajectory from the following types of trajectories ( [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle,along_road] ).-
COURSE_NAME: eight_course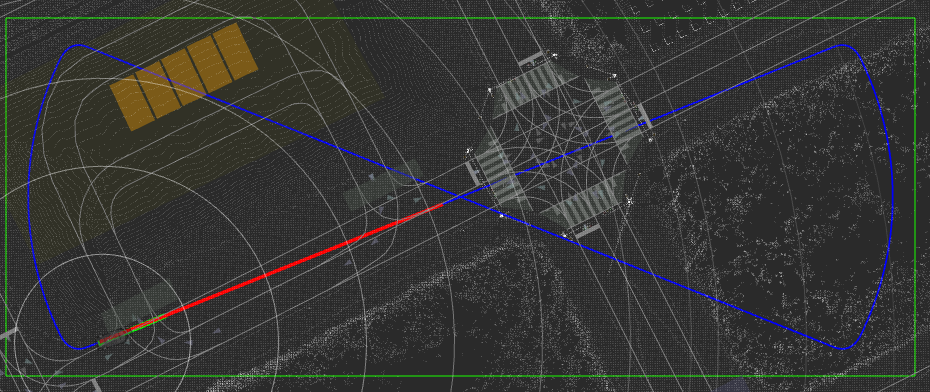
-
COURSE_NAME: u_shaped_return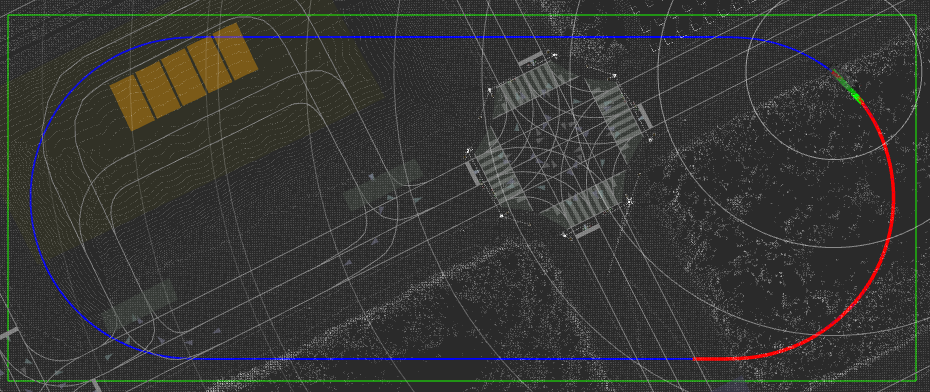
-
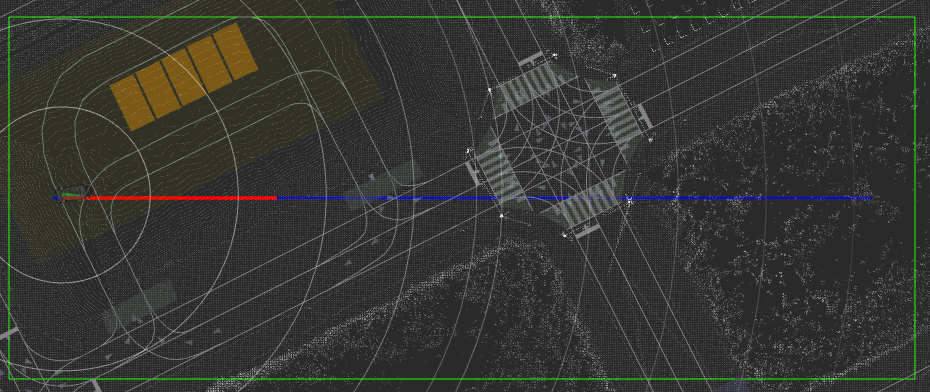
COURSE_NAME: straight_line_positiveorCOURSE_NAME: straight_line_negative( Both “straight_line_positive” and “straight_line_negative” represent straight line courses, but the direction of travel of the course is reversed.)
-
COURSE_NAME: reversal_loop_circleDrive within a circle while adding trajectories and collect data.
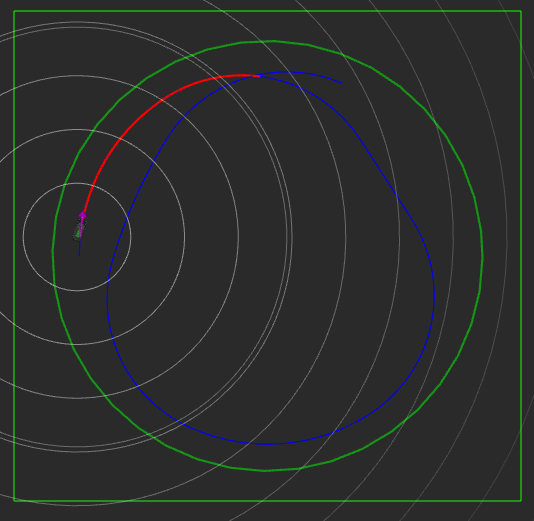
-
COURSE_NAME: along_roadGenerate trajectories along the road. This is particularly useful when drawing long straight paths along the road.
In this course, data collection is conducted only on long straight trajectories, while constant velocity,
velocity_on_curve, is maintained when driving on sections that include curves.The minimum length of these long straight trajectories can be specified using the parameter
minimum_length_of_straight_line(These two parametersvelocity_on_curveandminimum_length_of_straight_linecan be configured in./config/course_param/along_road_param.yaml).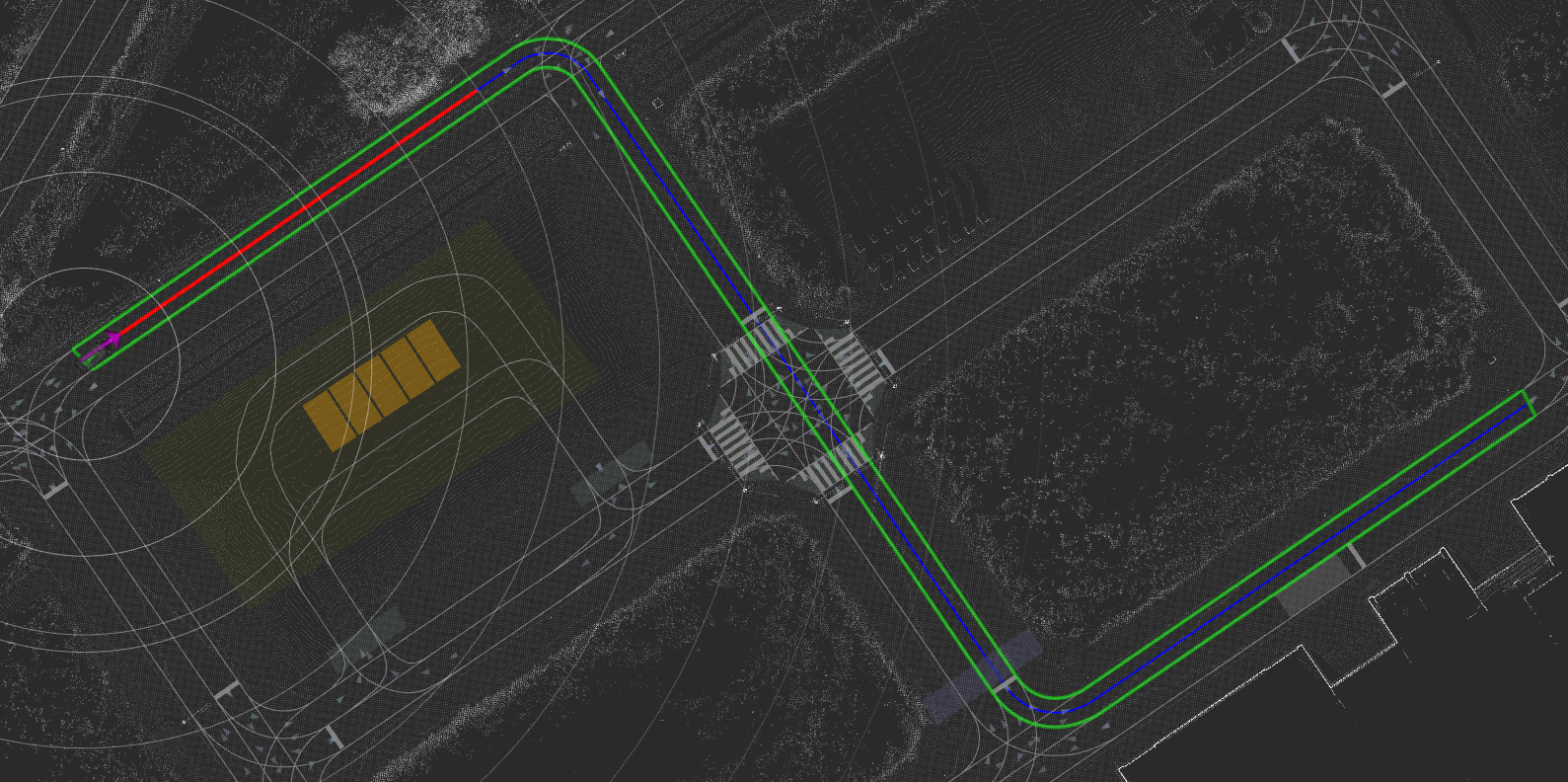
-
How to Use
- Launch Autoware.
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
-
Set an initial pose, see here.
-
Add the DataCollectingAreaSelectionTool and DataCollectingGoalPlugin RViz plugins by clicking the “+” icon at the top of the RViz window.
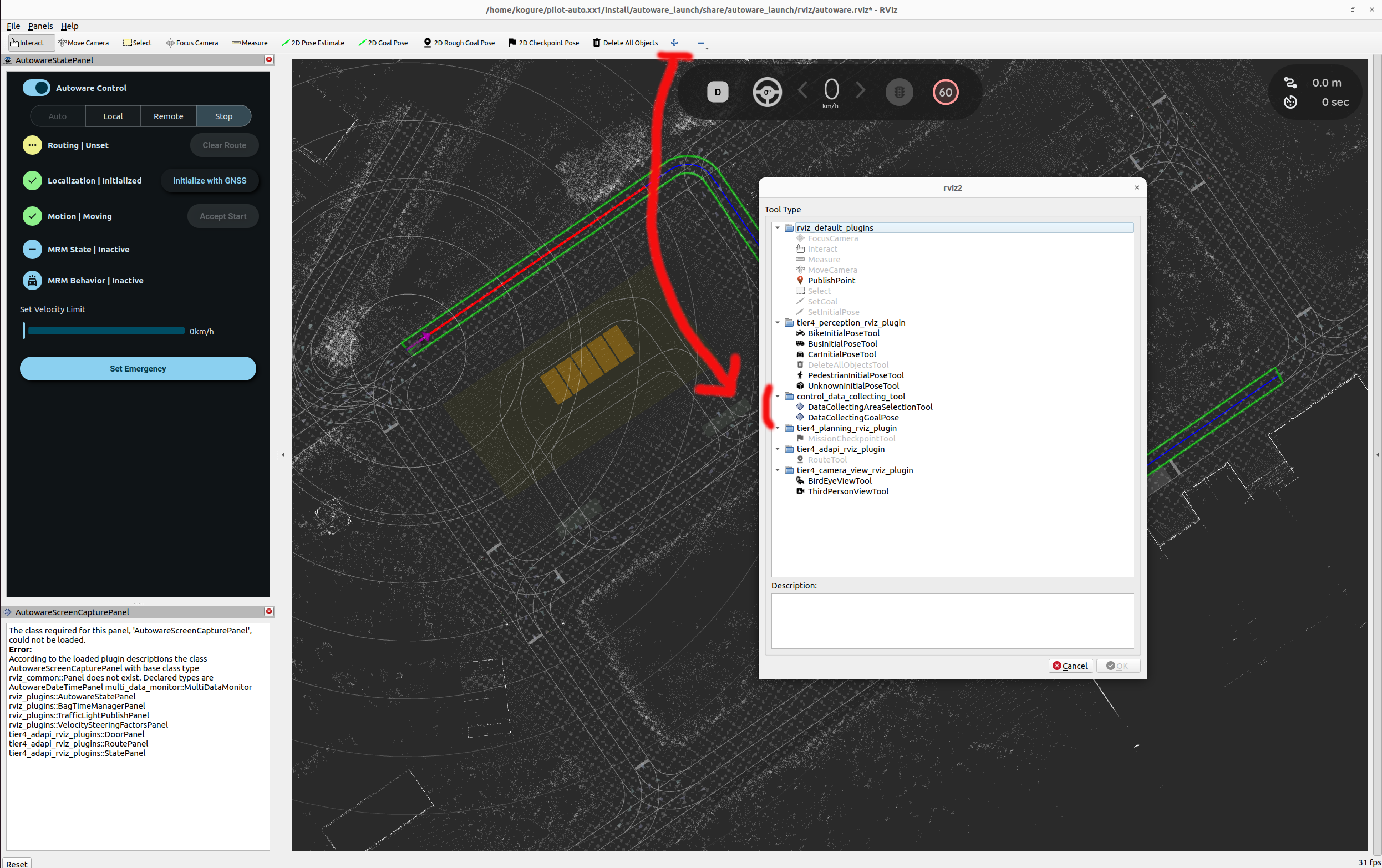
-
Launch control_data_collecting_tool.
ros2 launch control_data_collecting_tool control_data_collecting_tool.launch.py map_path:=$HOME/autoware_map/sample-map-planning accel_brake_map_path:=/path/to/your/accel_brake_map_dir
- If you use the `along_road` course, please specify the same map for `map_path` as the one used when launching Autoware. `map_path` is not necessary when using courses other than `along_road`.
- If you set CONTROL_MODE to actuation_cmd or external_actuation_cmd, please specify the directory where the accel/brake maps used by your control system are located.
- Control data collecting tool automatically records topics included in `config/topics.yaml` when the above command is executed. Topics will be saved in rosbag2 format in the current directory.
- The data from `/localization/kinematic_state` and `/localization/acceleration` located in the directory (rosbag2 format) where the command is executed will be automatically loaded and reflected in the data count for these topics.
(If `LOAD_ROSBAG2_FILES` in `config/param.yaml` is set to `false`, the data is not loaded.)
-
Add visualization in rviz:
-
/data_collecting_area- Type: Polygon
-
/data_collecting_trajectory_marker_array- Type: MarkerArray
-
/data_collecting_lookahead_marker_array- Type: MarkerArray
-
-
The following actions differ depending on the selected course. If you select the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], please proceed to 6.1. If you select the trajectory from [along_road], please proceed to 6.2.-
6.1 If you choose the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], selectDataCollectingAreaSelectionToolplugin.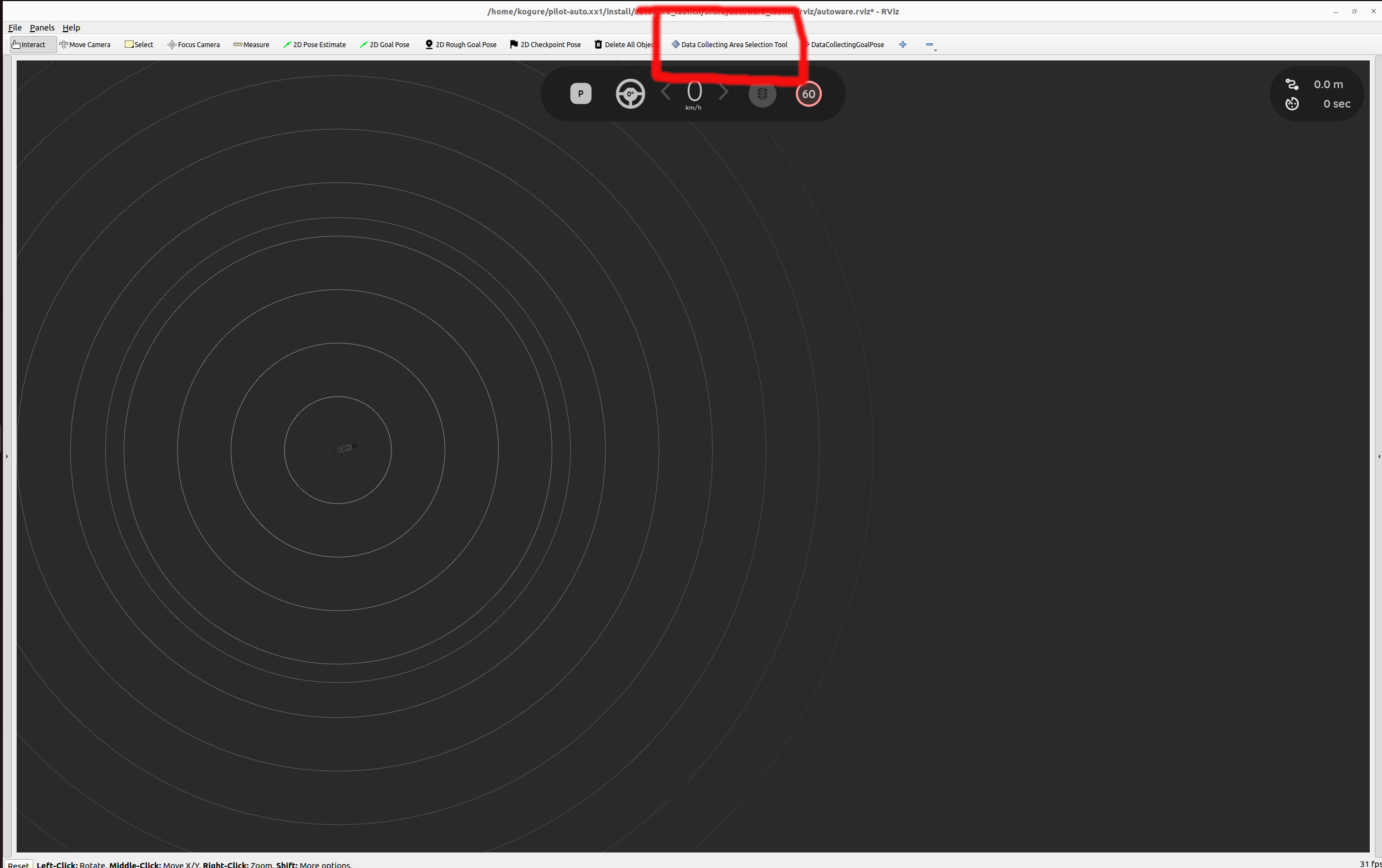
Highlight the data collecting area by dragging the mouse over it.
[!NOTE] You cannot change the data collecting area while driving.
-
6.2 If you choose the trajectory from [
along_road], selectDataCollectingGoalPoseplugin.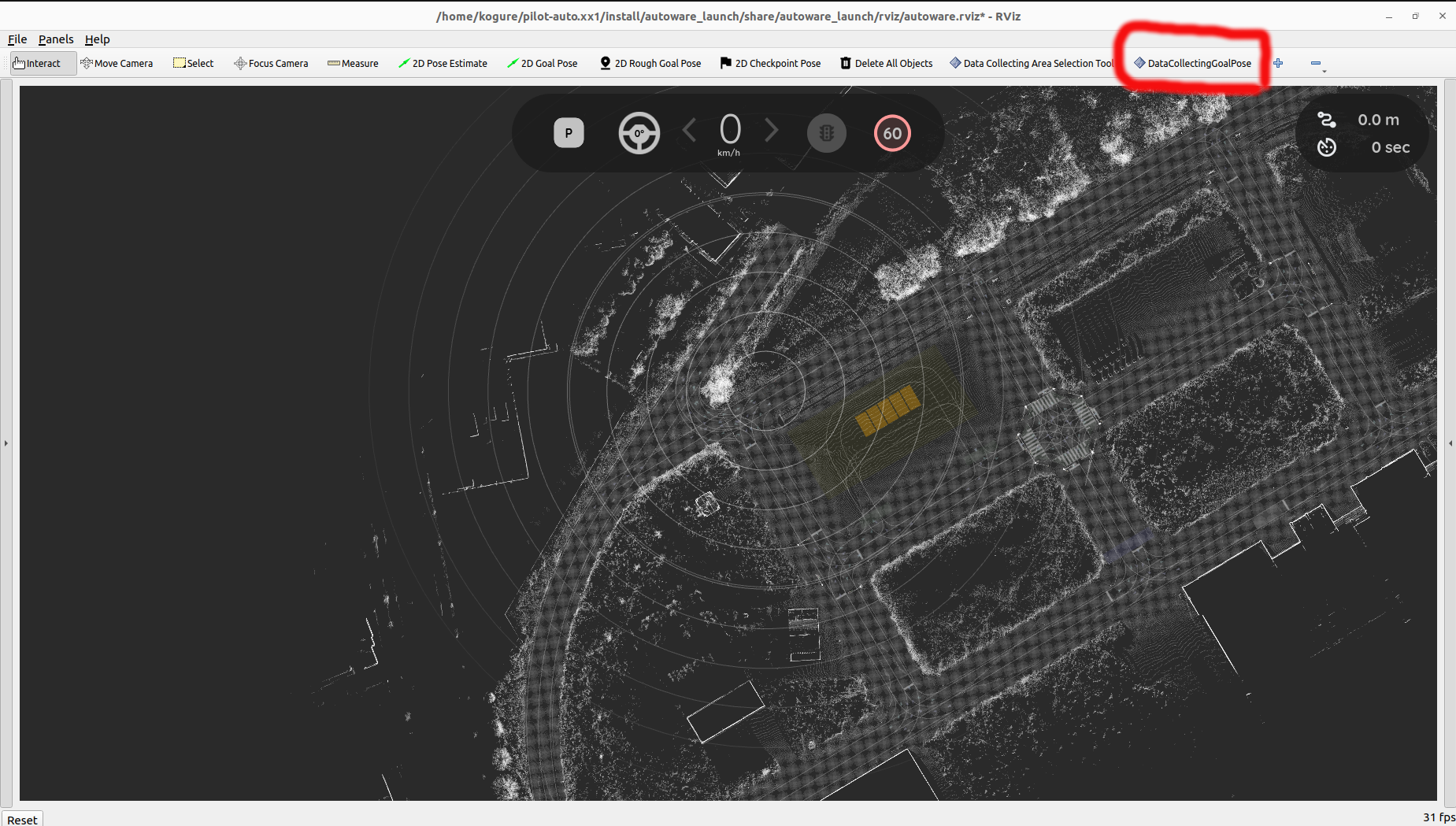
-
File truncated at 100 lines see the full file
Changelog for package control_data_collecting_tool
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
-
style(pre-commit): autofix (#275)
- apply pre-commit
* fix: add maintainer in planning_debug tools package.xml ---------
-
Contributors: Kyoichi Sugahara
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
feat(control_data_collecting_tool): add constant acceleration/actuation mode (#185)
- Add actuation mode
- Temporarily added data_collecting_pure_pursuit_trajectory_follower.py
- Remove data_collecting_pure_pursuit_trajectory_follower.py
- Add constant cmd scripts
- Add pedal threshold for data counting
- pre-commit run
- Add some comments
- Update install programs
- Update params
- pre-commit run
- Update README
- The bullet points were changed from numbers to letters.
- Update print message
- Fix bug and typo
- Update README
- pre-commit run
* Update control_data_collecting_tool/README.md ---------Co-authored-by: Kosuke Takeuchi <<kosuke.tnp@gmail.com>>
-
feat(control_data_collecting_tool): improve README and a slight modification to the data collection logic (#179)
- Improve README
- Modify data collction logic
- Final adjustment
- Spelling correction
- pre-commit run
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(control_data_collecting_tool): add masks to specify data collection range (#167)
- Add trajectory inside circle
- Fix bug
- Add lanelet2 trajectory
- pre-commit run
- Fix bug
- pre-commit
- Update README.md
- Add parameter descriptions to the README
- style(pre-commit): autofix
- Revise the content
- style(pre-commit): autofix
- Update README
- Update README
- Add comments
- Update prameters for along_road course
- style(pre-commit): autofix
- Add default mask and mask selector
- Add mask to plotter
- Data collection concerning Mask
- Modify the code to publish the pose
- style(pre-commit): autofix
- Modify to work even when map_path is not provided
- Add steer rate plot
- Update README.md and fix typo
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged control_data_collecting_tool at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Masayuki Aino
- Asei Inoue
- Toru Hishinuma
- Kosuke Takeuchi
- Takamasa Horibe
- Takayuki Murooka
Authors
Control data collecting tool
This package provides tools for automatically collecting data using pure pursuit control within a specified rectangular area.
Overview
- This package aims to collect a dataset consisting of control inputs (i.e.
control_cmd) and observation variables (i.e.kinematic_state,steering_status, etc). - The collected dataset can be used as training dataset for learning-based controllers, including smart_mpc.
- Data collecting approach is as follows:
- Following the trajectory using a pure pursuit control law.
- Adding noises to the trajectory and the control command for data diversity, improving the prediction accuracy of learning model.
- Setting the trajectory from the following types of trajectories ( [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle,along_road] ).-
COURSE_NAME: eight_course -
COURSE_NAME: u_shaped_return -
COURSE_NAME: straight_line_positiveorCOURSE_NAME: straight_line_negative( Both “straight_line_positive” and “straight_line_negative” represent straight line courses, but the direction of travel of the course is reversed.)
-
COURSE_NAME: reversal_loop_circleDrive within a circle while adding trajectories and collect data.
-
COURSE_NAME: along_roadGenerate trajectories along the road. This is particularly useful when drawing long straight paths along the road.
In this course, data collection is conducted only on long straight trajectories, while constant velocity,
velocity_on_curve, is maintained when driving on sections that include curves.The minimum length of these long straight trajectories can be specified using the parameter
minimum_length_of_straight_line(These two parametersvelocity_on_curveandminimum_length_of_straight_linecan be configured in./config/course_param/along_road_param.yaml).
-
How to Use
- Launch Autoware.
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
-
Set an initial pose, see here.
-
Add the DataCollectingAreaSelectionTool and DataCollectingGoalPlugin RViz plugins by clicking the “+” icon at the top of the RViz window.
-
Launch control_data_collecting_tool.
ros2 launch control_data_collecting_tool control_data_collecting_tool.launch.py map_path:=$HOME/autoware_map/sample-map-planning accel_brake_map_path:=/path/to/your/accel_brake_map_dir
- If you use the `along_road` course, please specify the same map for `map_path` as the one used when launching Autoware. `map_path` is not necessary when using courses other than `along_road`.
- If you set CONTROL_MODE to actuation_cmd or external_actuation_cmd, please specify the directory where the accel/brake maps used by your control system are located.
- Control data collecting tool automatically records topics included in `config/topics.yaml` when the above command is executed. Topics will be saved in rosbag2 format in the current directory.
- The data from `/localization/kinematic_state` and `/localization/acceleration` located in the directory (rosbag2 format) where the command is executed will be automatically loaded and reflected in the data count for these topics.
(If `LOAD_ROSBAG2_FILES` in `config/param.yaml` is set to `false`, the data is not loaded.)
-
Add visualization in rviz:
-
/data_collecting_area- Type: Polygon
-
/data_collecting_trajectory_marker_array- Type: MarkerArray
-
/data_collecting_lookahead_marker_array- Type: MarkerArray
-
-
The following actions differ depending on the selected course. If you select the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], please proceed to 6.1. If you select the trajectory from [along_road], please proceed to 6.2.-
6.1 If you choose the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], selectDataCollectingAreaSelectionToolplugin.Highlight the data collecting area by dragging the mouse over it.
[!NOTE] You cannot change the data collecting area while driving.
-
6.2 If you choose the trajectory from [
along_road], selectDataCollectingGoalPoseplugin.
-
File truncated at 100 lines see the full file
Changelog for package control_data_collecting_tool
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
-
style(pre-commit): autofix (#275)
- apply pre-commit
* fix: add maintainer in planning_debug tools package.xml ---------
-
Contributors: Kyoichi Sugahara
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
feat(control_data_collecting_tool): add constant acceleration/actuation mode (#185)
- Add actuation mode
- Temporarily added data_collecting_pure_pursuit_trajectory_follower.py
- Remove data_collecting_pure_pursuit_trajectory_follower.py
- Add constant cmd scripts
- Add pedal threshold for data counting
- pre-commit run
- Add some comments
- Update install programs
- Update params
- pre-commit run
- Update README
- The bullet points were changed from numbers to letters.
- Update print message
- Fix bug and typo
- Update README
- pre-commit run
* Update control_data_collecting_tool/README.md ---------Co-authored-by: Kosuke Takeuchi <<kosuke.tnp@gmail.com>>
-
feat(control_data_collecting_tool): improve README and a slight modification to the data collection logic (#179)
- Improve README
- Modify data collction logic
- Final adjustment
- Spelling correction
- pre-commit run
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(control_data_collecting_tool): add masks to specify data collection range (#167)
- Add trajectory inside circle
- Fix bug
- Add lanelet2 trajectory
- pre-commit run
- Fix bug
- pre-commit
- Update README.md
- Add parameter descriptions to the README
- style(pre-commit): autofix
- Revise the content
- style(pre-commit): autofix
- Update README
- Update README
- Add comments
- Update prameters for along_road course
- style(pre-commit): autofix
- Add default mask and mask selector
- Add mask to plotter
- Data collection concerning Mask
- Modify the code to publish the pose
- style(pre-commit): autofix
- Modify to work even when map_path is not provided
- Add steer rate plot
- Update README.md and fix typo
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged control_data_collecting_tool at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Masayuki Aino
- Asei Inoue
- Toru Hishinuma
- Kosuke Takeuchi
- Takamasa Horibe
- Takayuki Murooka
Authors
Control data collecting tool
This package provides tools for automatically collecting data using pure pursuit control within a specified rectangular area.
Overview
- This package aims to collect a dataset consisting of control inputs (i.e.
control_cmd) and observation variables (i.e.kinematic_state,steering_status, etc). - The collected dataset can be used as training dataset for learning-based controllers, including smart_mpc.
- Data collecting approach is as follows:
- Following the trajectory using a pure pursuit control law.
- Adding noises to the trajectory and the control command for data diversity, improving the prediction accuracy of learning model.
- Setting the trajectory from the following types of trajectories ( [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle,along_road] ).-
COURSE_NAME: eight_course -
COURSE_NAME: u_shaped_return -
COURSE_NAME: straight_line_positiveorCOURSE_NAME: straight_line_negative( Both “straight_line_positive” and “straight_line_negative” represent straight line courses, but the direction of travel of the course is reversed.)
-
COURSE_NAME: reversal_loop_circleDrive within a circle while adding trajectories and collect data.
-
COURSE_NAME: along_roadGenerate trajectories along the road. This is particularly useful when drawing long straight paths along the road.
In this course, data collection is conducted only on long straight trajectories, while constant velocity,
velocity_on_curve, is maintained when driving on sections that include curves.The minimum length of these long straight trajectories can be specified using the parameter
minimum_length_of_straight_line(These two parametersvelocity_on_curveandminimum_length_of_straight_linecan be configured in./config/course_param/along_road_param.yaml).
-
How to Use
- Launch Autoware.
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
-
Set an initial pose, see here.
-
Add the DataCollectingAreaSelectionTool and DataCollectingGoalPlugin RViz plugins by clicking the “+” icon at the top of the RViz window.
-
Launch control_data_collecting_tool.
ros2 launch control_data_collecting_tool control_data_collecting_tool.launch.py map_path:=$HOME/autoware_map/sample-map-planning accel_brake_map_path:=/path/to/your/accel_brake_map_dir
- If you use the `along_road` course, please specify the same map for `map_path` as the one used when launching Autoware. `map_path` is not necessary when using courses other than `along_road`.
- If you set CONTROL_MODE to actuation_cmd or external_actuation_cmd, please specify the directory where the accel/brake maps used by your control system are located.
- Control data collecting tool automatically records topics included in `config/topics.yaml` when the above command is executed. Topics will be saved in rosbag2 format in the current directory.
- The data from `/localization/kinematic_state` and `/localization/acceleration` located in the directory (rosbag2 format) where the command is executed will be automatically loaded and reflected in the data count for these topics.
(If `LOAD_ROSBAG2_FILES` in `config/param.yaml` is set to `false`, the data is not loaded.)
-
Add visualization in rviz:
-
/data_collecting_area- Type: Polygon
-
/data_collecting_trajectory_marker_array- Type: MarkerArray
-
/data_collecting_lookahead_marker_array- Type: MarkerArray
-
-
The following actions differ depending on the selected course. If you select the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], please proceed to 6.1. If you select the trajectory from [along_road], please proceed to 6.2.-
6.1 If you choose the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], selectDataCollectingAreaSelectionToolplugin.Highlight the data collecting area by dragging the mouse over it.
[!NOTE] You cannot change the data collecting area while driving.
-
6.2 If you choose the trajectory from [
along_road], selectDataCollectingGoalPoseplugin.
-
File truncated at 100 lines see the full file
Changelog for package control_data_collecting_tool
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
-
style(pre-commit): autofix (#275)
- apply pre-commit
* fix: add maintainer in planning_debug tools package.xml ---------
-
Contributors: Kyoichi Sugahara
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
feat(control_data_collecting_tool): add constant acceleration/actuation mode (#185)
- Add actuation mode
- Temporarily added data_collecting_pure_pursuit_trajectory_follower.py
- Remove data_collecting_pure_pursuit_trajectory_follower.py
- Add constant cmd scripts
- Add pedal threshold for data counting
- pre-commit run
- Add some comments
- Update install programs
- Update params
- pre-commit run
- Update README
- The bullet points were changed from numbers to letters.
- Update print message
- Fix bug and typo
- Update README
- pre-commit run
* Update control_data_collecting_tool/README.md ---------Co-authored-by: Kosuke Takeuchi <<kosuke.tnp@gmail.com>>
-
feat(control_data_collecting_tool): improve README and a slight modification to the data collection logic (#179)
- Improve README
- Modify data collction logic
- Final adjustment
- Spelling correction
- pre-commit run
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(control_data_collecting_tool): add masks to specify data collection range (#167)
- Add trajectory inside circle
- Fix bug
- Add lanelet2 trajectory
- pre-commit run
- Fix bug
- pre-commit
- Update README.md
- Add parameter descriptions to the README
- style(pre-commit): autofix
- Revise the content
- style(pre-commit): autofix
- Update README
- Update README
- Add comments
- Update prameters for along_road course
- style(pre-commit): autofix
- Add default mask and mask selector
- Add mask to plotter
- Data collection concerning Mask
- Modify the code to publish the pose
- style(pre-commit): autofix
- Modify to work even when map_path is not provided
- Add steer rate plot
- Update README.md and fix typo
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged control_data_collecting_tool at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Masayuki Aino
- Asei Inoue
- Toru Hishinuma
- Kosuke Takeuchi
- Takamasa Horibe
- Takayuki Murooka
Authors
Control data collecting tool
This package provides tools for automatically collecting data using pure pursuit control within a specified rectangular area.
Overview
- This package aims to collect a dataset consisting of control inputs (i.e.
control_cmd) and observation variables (i.e.kinematic_state,steering_status, etc). - The collected dataset can be used as training dataset for learning-based controllers, including smart_mpc.
- Data collecting approach is as follows:
- Following the trajectory using a pure pursuit control law.
- Adding noises to the trajectory and the control command for data diversity, improving the prediction accuracy of learning model.
- Setting the trajectory from the following types of trajectories ( [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle,along_road] ).-
COURSE_NAME: eight_course -
COURSE_NAME: u_shaped_return -
COURSE_NAME: straight_line_positiveorCOURSE_NAME: straight_line_negative( Both “straight_line_positive” and “straight_line_negative” represent straight line courses, but the direction of travel of the course is reversed.)
-
COURSE_NAME: reversal_loop_circleDrive within a circle while adding trajectories and collect data.
-
COURSE_NAME: along_roadGenerate trajectories along the road. This is particularly useful when drawing long straight paths along the road.
In this course, data collection is conducted only on long straight trajectories, while constant velocity,
velocity_on_curve, is maintained when driving on sections that include curves.The minimum length of these long straight trajectories can be specified using the parameter
minimum_length_of_straight_line(These two parametersvelocity_on_curveandminimum_length_of_straight_linecan be configured in./config/course_param/along_road_param.yaml).
-
How to Use
- Launch Autoware.
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
-
Set an initial pose, see here.
-
Add the DataCollectingAreaSelectionTool and DataCollectingGoalPlugin RViz plugins by clicking the “+” icon at the top of the RViz window.
-
Launch control_data_collecting_tool.
ros2 launch control_data_collecting_tool control_data_collecting_tool.launch.py map_path:=$HOME/autoware_map/sample-map-planning accel_brake_map_path:=/path/to/your/accel_brake_map_dir
- If you use the `along_road` course, please specify the same map for `map_path` as the one used when launching Autoware. `map_path` is not necessary when using courses other than `along_road`.
- If you set CONTROL_MODE to actuation_cmd or external_actuation_cmd, please specify the directory where the accel/brake maps used by your control system are located.
- Control data collecting tool automatically records topics included in `config/topics.yaml` when the above command is executed. Topics will be saved in rosbag2 format in the current directory.
- The data from `/localization/kinematic_state` and `/localization/acceleration` located in the directory (rosbag2 format) where the command is executed will be automatically loaded and reflected in the data count for these topics.
(If `LOAD_ROSBAG2_FILES` in `config/param.yaml` is set to `false`, the data is not loaded.)
-
Add visualization in rviz:
-
/data_collecting_area- Type: Polygon
-
/data_collecting_trajectory_marker_array- Type: MarkerArray
-
/data_collecting_lookahead_marker_array- Type: MarkerArray
-
-
The following actions differ depending on the selected course. If you select the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], please proceed to 6.1. If you select the trajectory from [along_road], please proceed to 6.2.-
6.1 If you choose the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], selectDataCollectingAreaSelectionToolplugin.Highlight the data collecting area by dragging the mouse over it.
[!NOTE] You cannot change the data collecting area while driving.
-
6.2 If you choose the trajectory from [
along_road], selectDataCollectingGoalPoseplugin.
-
File truncated at 100 lines see the full file
Changelog for package control_data_collecting_tool
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
-
style(pre-commit): autofix (#275)
- apply pre-commit
* fix: add maintainer in planning_debug tools package.xml ---------
-
Contributors: Kyoichi Sugahara
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
feat(control_data_collecting_tool): add constant acceleration/actuation mode (#185)
- Add actuation mode
- Temporarily added data_collecting_pure_pursuit_trajectory_follower.py
- Remove data_collecting_pure_pursuit_trajectory_follower.py
- Add constant cmd scripts
- Add pedal threshold for data counting
- pre-commit run
- Add some comments
- Update install programs
- Update params
- pre-commit run
- Update README
- The bullet points were changed from numbers to letters.
- Update print message
- Fix bug and typo
- Update README
- pre-commit run
* Update control_data_collecting_tool/README.md ---------Co-authored-by: Kosuke Takeuchi <<kosuke.tnp@gmail.com>>
-
feat(control_data_collecting_tool): improve README and a slight modification to the data collection logic (#179)
- Improve README
- Modify data collction logic
- Final adjustment
- Spelling correction
- pre-commit run
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(control_data_collecting_tool): add masks to specify data collection range (#167)
- Add trajectory inside circle
- Fix bug
- Add lanelet2 trajectory
- pre-commit run
- Fix bug
- pre-commit
- Update README.md
- Add parameter descriptions to the README
- style(pre-commit): autofix
- Revise the content
- style(pre-commit): autofix
- Update README
- Update README
- Add comments
- Update prameters for along_road course
- style(pre-commit): autofix
- Add default mask and mask selector
- Add mask to plotter
- Data collection concerning Mask
- Modify the code to publish the pose
- style(pre-commit): autofix
- Modify to work even when map_path is not provided
- Add steer rate plot
- Update README.md and fix typo
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged control_data_collecting_tool at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Masayuki Aino
- Asei Inoue
- Toru Hishinuma
- Kosuke Takeuchi
- Takamasa Horibe
- Takayuki Murooka
Authors
Control data collecting tool
This package provides tools for automatically collecting data using pure pursuit control within a specified rectangular area.
Overview
- This package aims to collect a dataset consisting of control inputs (i.e.
control_cmd) and observation variables (i.e.kinematic_state,steering_status, etc). - The collected dataset can be used as training dataset for learning-based controllers, including smart_mpc.
- Data collecting approach is as follows:
- Following the trajectory using a pure pursuit control law.
- Adding noises to the trajectory and the control command for data diversity, improving the prediction accuracy of learning model.
- Setting the trajectory from the following types of trajectories ( [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle,along_road] ).-
COURSE_NAME: eight_course -
COURSE_NAME: u_shaped_return -
COURSE_NAME: straight_line_positiveorCOURSE_NAME: straight_line_negative( Both “straight_line_positive” and “straight_line_negative” represent straight line courses, but the direction of travel of the course is reversed.)
-
COURSE_NAME: reversal_loop_circleDrive within a circle while adding trajectories and collect data.
-
COURSE_NAME: along_roadGenerate trajectories along the road. This is particularly useful when drawing long straight paths along the road.
In this course, data collection is conducted only on long straight trajectories, while constant velocity,
velocity_on_curve, is maintained when driving on sections that include curves.The minimum length of these long straight trajectories can be specified using the parameter
minimum_length_of_straight_line(These two parametersvelocity_on_curveandminimum_length_of_straight_linecan be configured in./config/course_param/along_road_param.yaml).
-
How to Use
- Launch Autoware.
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
-
Set an initial pose, see here.
-
Add the DataCollectingAreaSelectionTool and DataCollectingGoalPlugin RViz plugins by clicking the “+” icon at the top of the RViz window.
-
Launch control_data_collecting_tool.
ros2 launch control_data_collecting_tool control_data_collecting_tool.launch.py map_path:=$HOME/autoware_map/sample-map-planning accel_brake_map_path:=/path/to/your/accel_brake_map_dir
- If you use the `along_road` course, please specify the same map for `map_path` as the one used when launching Autoware. `map_path` is not necessary when using courses other than `along_road`.
- If you set CONTROL_MODE to actuation_cmd or external_actuation_cmd, please specify the directory where the accel/brake maps used by your control system are located.
- Control data collecting tool automatically records topics included in `config/topics.yaml` when the above command is executed. Topics will be saved in rosbag2 format in the current directory.
- The data from `/localization/kinematic_state` and `/localization/acceleration` located in the directory (rosbag2 format) where the command is executed will be automatically loaded and reflected in the data count for these topics.
(If `LOAD_ROSBAG2_FILES` in `config/param.yaml` is set to `false`, the data is not loaded.)
-
Add visualization in rviz:
-
/data_collecting_area- Type: Polygon
-
/data_collecting_trajectory_marker_array- Type: MarkerArray
-
/data_collecting_lookahead_marker_array- Type: MarkerArray
-
-
The following actions differ depending on the selected course. If you select the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], please proceed to 6.1. If you select the trajectory from [along_road], please proceed to 6.2.-
6.1 If you choose the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], selectDataCollectingAreaSelectionToolplugin.Highlight the data collecting area by dragging the mouse over it.
[!NOTE] You cannot change the data collecting area while driving.
-
6.2 If you choose the trajectory from [
along_road], selectDataCollectingGoalPoseplugin.
-
File truncated at 100 lines see the full file
Changelog for package control_data_collecting_tool
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
-
style(pre-commit): autofix (#275)
- apply pre-commit
* fix: add maintainer in planning_debug tools package.xml ---------
-
Contributors: Kyoichi Sugahara
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
feat(control_data_collecting_tool): add constant acceleration/actuation mode (#185)
- Add actuation mode
- Temporarily added data_collecting_pure_pursuit_trajectory_follower.py
- Remove data_collecting_pure_pursuit_trajectory_follower.py
- Add constant cmd scripts
- Add pedal threshold for data counting
- pre-commit run
- Add some comments
- Update install programs
- Update params
- pre-commit run
- Update README
- The bullet points were changed from numbers to letters.
- Update print message
- Fix bug and typo
- Update README
- pre-commit run
* Update control_data_collecting_tool/README.md ---------Co-authored-by: Kosuke Takeuchi <<kosuke.tnp@gmail.com>>
-
feat(control_data_collecting_tool): improve README and a slight modification to the data collection logic (#179)
- Improve README
- Modify data collction logic
- Final adjustment
- Spelling correction
- pre-commit run
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(control_data_collecting_tool): add masks to specify data collection range (#167)
- Add trajectory inside circle
- Fix bug
- Add lanelet2 trajectory
- pre-commit run
- Fix bug
- pre-commit
- Update README.md
- Add parameter descriptions to the README
- style(pre-commit): autofix
- Revise the content
- style(pre-commit): autofix
- Update README
- Update README
- Add comments
- Update prameters for along_road course
- style(pre-commit): autofix
- Add default mask and mask selector
- Add mask to plotter
- Data collection concerning Mask
- Modify the code to publish the pose
- style(pre-commit): autofix
- Modify to work even when map_path is not provided
- Add steer rate plot
- Update README.md and fix typo
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged control_data_collecting_tool at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Masayuki Aino
- Asei Inoue
- Toru Hishinuma
- Kosuke Takeuchi
- Takamasa Horibe
- Takayuki Murooka
Authors
Control data collecting tool
This package provides tools for automatically collecting data using pure pursuit control within a specified rectangular area.
Overview
- This package aims to collect a dataset consisting of control inputs (i.e.
control_cmd) and observation variables (i.e.kinematic_state,steering_status, etc). - The collected dataset can be used as training dataset for learning-based controllers, including smart_mpc.
- Data collecting approach is as follows:
- Following the trajectory using a pure pursuit control law.
- Adding noises to the trajectory and the control command for data diversity, improving the prediction accuracy of learning model.
- Setting the trajectory from the following types of trajectories ( [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle,along_road] ).-
COURSE_NAME: eight_course -
COURSE_NAME: u_shaped_return -
COURSE_NAME: straight_line_positiveorCOURSE_NAME: straight_line_negative( Both “straight_line_positive” and “straight_line_negative” represent straight line courses, but the direction of travel of the course is reversed.)
-
COURSE_NAME: reversal_loop_circleDrive within a circle while adding trajectories and collect data.
-
COURSE_NAME: along_roadGenerate trajectories along the road. This is particularly useful when drawing long straight paths along the road.
In this course, data collection is conducted only on long straight trajectories, while constant velocity,
velocity_on_curve, is maintained when driving on sections that include curves.The minimum length of these long straight trajectories can be specified using the parameter
minimum_length_of_straight_line(These two parametersvelocity_on_curveandminimum_length_of_straight_linecan be configured in./config/course_param/along_road_param.yaml).
-
How to Use
- Launch Autoware.
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
-
Set an initial pose, see here.
-
Add the DataCollectingAreaSelectionTool and DataCollectingGoalPlugin RViz plugins by clicking the “+” icon at the top of the RViz window.
-
Launch control_data_collecting_tool.
ros2 launch control_data_collecting_tool control_data_collecting_tool.launch.py map_path:=$HOME/autoware_map/sample-map-planning accel_brake_map_path:=/path/to/your/accel_brake_map_dir
- If you use the `along_road` course, please specify the same map for `map_path` as the one used when launching Autoware. `map_path` is not necessary when using courses other than `along_road`.
- If you set CONTROL_MODE to actuation_cmd or external_actuation_cmd, please specify the directory where the accel/brake maps used by your control system are located.
- Control data collecting tool automatically records topics included in `config/topics.yaml` when the above command is executed. Topics will be saved in rosbag2 format in the current directory.
- The data from `/localization/kinematic_state` and `/localization/acceleration` located in the directory (rosbag2 format) where the command is executed will be automatically loaded and reflected in the data count for these topics.
(If `LOAD_ROSBAG2_FILES` in `config/param.yaml` is set to `false`, the data is not loaded.)
-
Add visualization in rviz:
-
/data_collecting_area- Type: Polygon
-
/data_collecting_trajectory_marker_array- Type: MarkerArray
-
/data_collecting_lookahead_marker_array- Type: MarkerArray
-
-
The following actions differ depending on the selected course. If you select the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], please proceed to 6.1. If you select the trajectory from [along_road], please proceed to 6.2.-
6.1 If you choose the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], selectDataCollectingAreaSelectionToolplugin.Highlight the data collecting area by dragging the mouse over it.
[!NOTE] You cannot change the data collecting area while driving.
-
6.2 If you choose the trajectory from [
along_road], selectDataCollectingGoalPoseplugin.
-
File truncated at 100 lines see the full file
Changelog for package control_data_collecting_tool
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
-
style(pre-commit): autofix (#275)
- apply pre-commit
* fix: add maintainer in planning_debug tools package.xml ---------
-
Contributors: Kyoichi Sugahara
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
feat(control_data_collecting_tool): add constant acceleration/actuation mode (#185)
- Add actuation mode
- Temporarily added data_collecting_pure_pursuit_trajectory_follower.py
- Remove data_collecting_pure_pursuit_trajectory_follower.py
- Add constant cmd scripts
- Add pedal threshold for data counting
- pre-commit run
- Add some comments
- Update install programs
- Update params
- pre-commit run
- Update README
- The bullet points were changed from numbers to letters.
- Update print message
- Fix bug and typo
- Update README
- pre-commit run
* Update control_data_collecting_tool/README.md ---------Co-authored-by: Kosuke Takeuchi <<kosuke.tnp@gmail.com>>
-
feat(control_data_collecting_tool): improve README and a slight modification to the data collection logic (#179)
- Improve README
- Modify data collction logic
- Final adjustment
- Spelling correction
- pre-commit run
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(control_data_collecting_tool): add masks to specify data collection range (#167)
- Add trajectory inside circle
- Fix bug
- Add lanelet2 trajectory
- pre-commit run
- Fix bug
- pre-commit
- Update README.md
- Add parameter descriptions to the README
- style(pre-commit): autofix
- Revise the content
- style(pre-commit): autofix
- Update README
- Update README
- Add comments
- Update prameters for along_road course
- style(pre-commit): autofix
- Add default mask and mask selector
- Add mask to plotter
- Data collection concerning Mask
- Modify the code to publish the pose
- style(pre-commit): autofix
- Modify to work even when map_path is not provided
- Add steer rate plot
- Update README.md and fix typo
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged control_data_collecting_tool at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Masayuki Aino
- Asei Inoue
- Toru Hishinuma
- Kosuke Takeuchi
- Takamasa Horibe
- Takayuki Murooka
Authors
Control data collecting tool
This package provides tools for automatically collecting data using pure pursuit control within a specified rectangular area.
Overview
- This package aims to collect a dataset consisting of control inputs (i.e.
control_cmd) and observation variables (i.e.kinematic_state,steering_status, etc). - The collected dataset can be used as training dataset for learning-based controllers, including smart_mpc.
- Data collecting approach is as follows:
- Following the trajectory using a pure pursuit control law.
- Adding noises to the trajectory and the control command for data diversity, improving the prediction accuracy of learning model.
- Setting the trajectory from the following types of trajectories ( [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle,along_road] ).-
COURSE_NAME: eight_course -
COURSE_NAME: u_shaped_return -
COURSE_NAME: straight_line_positiveorCOURSE_NAME: straight_line_negative( Both “straight_line_positive” and “straight_line_negative” represent straight line courses, but the direction of travel of the course is reversed.)
-
COURSE_NAME: reversal_loop_circleDrive within a circle while adding trajectories and collect data.
-
COURSE_NAME: along_roadGenerate trajectories along the road. This is particularly useful when drawing long straight paths along the road.
In this course, data collection is conducted only on long straight trajectories, while constant velocity,
velocity_on_curve, is maintained when driving on sections that include curves.The minimum length of these long straight trajectories can be specified using the parameter
minimum_length_of_straight_line(These two parametersvelocity_on_curveandminimum_length_of_straight_linecan be configured in./config/course_param/along_road_param.yaml).
-
How to Use
- Launch Autoware.
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
-
Set an initial pose, see here.
-
Add the DataCollectingAreaSelectionTool and DataCollectingGoalPlugin RViz plugins by clicking the “+” icon at the top of the RViz window.
-
Launch control_data_collecting_tool.
ros2 launch control_data_collecting_tool control_data_collecting_tool.launch.py map_path:=$HOME/autoware_map/sample-map-planning accel_brake_map_path:=/path/to/your/accel_brake_map_dir
- If you use the `along_road` course, please specify the same map for `map_path` as the one used when launching Autoware. `map_path` is not necessary when using courses other than `along_road`.
- If you set CONTROL_MODE to actuation_cmd or external_actuation_cmd, please specify the directory where the accel/brake maps used by your control system are located.
- Control data collecting tool automatically records topics included in `config/topics.yaml` when the above command is executed. Topics will be saved in rosbag2 format in the current directory.
- The data from `/localization/kinematic_state` and `/localization/acceleration` located in the directory (rosbag2 format) where the command is executed will be automatically loaded and reflected in the data count for these topics.
(If `LOAD_ROSBAG2_FILES` in `config/param.yaml` is set to `false`, the data is not loaded.)
-
Add visualization in rviz:
-
/data_collecting_area- Type: Polygon
-
/data_collecting_trajectory_marker_array- Type: MarkerArray
-
/data_collecting_lookahead_marker_array- Type: MarkerArray
-
-
The following actions differ depending on the selected course. If you select the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], please proceed to 6.1. If you select the trajectory from [along_road], please proceed to 6.2.-
6.1 If you choose the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], selectDataCollectingAreaSelectionToolplugin.Highlight the data collecting area by dragging the mouse over it.
[!NOTE] You cannot change the data collecting area while driving.
-
6.2 If you choose the trajectory from [
along_road], selectDataCollectingGoalPoseplugin.
-
File truncated at 100 lines see the full file
Changelog for package control_data_collecting_tool
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
-
style(pre-commit): autofix (#275)
- apply pre-commit
* fix: add maintainer in planning_debug tools package.xml ---------
-
Contributors: Kyoichi Sugahara
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
feat(control_data_collecting_tool): add constant acceleration/actuation mode (#185)
- Add actuation mode
- Temporarily added data_collecting_pure_pursuit_trajectory_follower.py
- Remove data_collecting_pure_pursuit_trajectory_follower.py
- Add constant cmd scripts
- Add pedal threshold for data counting
- pre-commit run
- Add some comments
- Update install programs
- Update params
- pre-commit run
- Update README
- The bullet points were changed from numbers to letters.
- Update print message
- Fix bug and typo
- Update README
- pre-commit run
* Update control_data_collecting_tool/README.md ---------Co-authored-by: Kosuke Takeuchi <<kosuke.tnp@gmail.com>>
-
feat(control_data_collecting_tool): improve README and a slight modification to the data collection logic (#179)
- Improve README
- Modify data collction logic
- Final adjustment
- Spelling correction
- pre-commit run
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(control_data_collecting_tool): add masks to specify data collection range (#167)
- Add trajectory inside circle
- Fix bug
- Add lanelet2 trajectory
- pre-commit run
- Fix bug
- pre-commit
- Update README.md
- Add parameter descriptions to the README
- style(pre-commit): autofix
- Revise the content
- style(pre-commit): autofix
- Update README
- Update README
- Add comments
- Update prameters for along_road course
- style(pre-commit): autofix
- Add default mask and mask selector
- Add mask to plotter
- Data collection concerning Mask
- Modify the code to publish the pose
- style(pre-commit): autofix
- Modify to work even when map_path is not provided
- Add steer rate plot
- Update README.md and fix typo
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged control_data_collecting_tool at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Masayuki Aino
- Asei Inoue
- Toru Hishinuma
- Kosuke Takeuchi
- Takamasa Horibe
- Takayuki Murooka
Authors
Control data collecting tool
This package provides tools for automatically collecting data using pure pursuit control within a specified rectangular area.
Overview
- This package aims to collect a dataset consisting of control inputs (i.e.
control_cmd) and observation variables (i.e.kinematic_state,steering_status, etc). - The collected dataset can be used as training dataset for learning-based controllers, including smart_mpc.
- Data collecting approach is as follows:
- Following the trajectory using a pure pursuit control law.
- Adding noises to the trajectory and the control command for data diversity, improving the prediction accuracy of learning model.
- Setting the trajectory from the following types of trajectories ( [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle,along_road] ).-
COURSE_NAME: eight_course -
COURSE_NAME: u_shaped_return -
COURSE_NAME: straight_line_positiveorCOURSE_NAME: straight_line_negative( Both “straight_line_positive” and “straight_line_negative” represent straight line courses, but the direction of travel of the course is reversed.)
-
COURSE_NAME: reversal_loop_circleDrive within a circle while adding trajectories and collect data.
-
COURSE_NAME: along_roadGenerate trajectories along the road. This is particularly useful when drawing long straight paths along the road.
In this course, data collection is conducted only on long straight trajectories, while constant velocity,
velocity_on_curve, is maintained when driving on sections that include curves.The minimum length of these long straight trajectories can be specified using the parameter
minimum_length_of_straight_line(These two parametersvelocity_on_curveandminimum_length_of_straight_linecan be configured in./config/course_param/along_road_param.yaml).
-
How to Use
- Launch Autoware.
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
-
Set an initial pose, see here.
-
Add the DataCollectingAreaSelectionTool and DataCollectingGoalPlugin RViz plugins by clicking the “+” icon at the top of the RViz window.
-
Launch control_data_collecting_tool.
ros2 launch control_data_collecting_tool control_data_collecting_tool.launch.py map_path:=$HOME/autoware_map/sample-map-planning accel_brake_map_path:=/path/to/your/accel_brake_map_dir
- If you use the `along_road` course, please specify the same map for `map_path` as the one used when launching Autoware. `map_path` is not necessary when using courses other than `along_road`.
- If you set CONTROL_MODE to actuation_cmd or external_actuation_cmd, please specify the directory where the accel/brake maps used by your control system are located.
- Control data collecting tool automatically records topics included in `config/topics.yaml` when the above command is executed. Topics will be saved in rosbag2 format in the current directory.
- The data from `/localization/kinematic_state` and `/localization/acceleration` located in the directory (rosbag2 format) where the command is executed will be automatically loaded and reflected in the data count for these topics.
(If `LOAD_ROSBAG2_FILES` in `config/param.yaml` is set to `false`, the data is not loaded.)
-
Add visualization in rviz:
-
/data_collecting_area- Type: Polygon
-
/data_collecting_trajectory_marker_array- Type: MarkerArray
-
/data_collecting_lookahead_marker_array- Type: MarkerArray
-
-
The following actions differ depending on the selected course. If you select the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], please proceed to 6.1. If you select the trajectory from [along_road], please proceed to 6.2.-
6.1 If you choose the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], selectDataCollectingAreaSelectionToolplugin.Highlight the data collecting area by dragging the mouse over it.
[!NOTE] You cannot change the data collecting area while driving.
-
6.2 If you choose the trajectory from [
along_road], selectDataCollectingGoalPoseplugin.
-
File truncated at 100 lines see the full file
Changelog for package control_data_collecting_tool
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
-
style(pre-commit): autofix (#275)
- apply pre-commit
* fix: add maintainer in planning_debug tools package.xml ---------
-
Contributors: Kyoichi Sugahara
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
feat(control_data_collecting_tool): add constant acceleration/actuation mode (#185)
- Add actuation mode
- Temporarily added data_collecting_pure_pursuit_trajectory_follower.py
- Remove data_collecting_pure_pursuit_trajectory_follower.py
- Add constant cmd scripts
- Add pedal threshold for data counting
- pre-commit run
- Add some comments
- Update install programs
- Update params
- pre-commit run
- Update README
- The bullet points were changed from numbers to letters.
- Update print message
- Fix bug and typo
- Update README
- pre-commit run
* Update control_data_collecting_tool/README.md ---------Co-authored-by: Kosuke Takeuchi <<kosuke.tnp@gmail.com>>
-
feat(control_data_collecting_tool): improve README and a slight modification to the data collection logic (#179)
- Improve README
- Modify data collction logic
- Final adjustment
- Spelling correction
- pre-commit run
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(control_data_collecting_tool): add masks to specify data collection range (#167)
- Add trajectory inside circle
- Fix bug
- Add lanelet2 trajectory
- pre-commit run
- Fix bug
- pre-commit
- Update README.md
- Add parameter descriptions to the README
- style(pre-commit): autofix
- Revise the content
- style(pre-commit): autofix
- Update README
- Update README
- Add comments
- Update prameters for along_road course
- style(pre-commit): autofix
- Add default mask and mask selector
- Add mask to plotter
- Data collection concerning Mask
- Modify the code to publish the pose
- style(pre-commit): autofix
- Modify to work even when map_path is not provided
- Add steer rate plot
- Update README.md and fix typo
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged control_data_collecting_tool at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Masayuki Aino
- Asei Inoue
- Toru Hishinuma
- Kosuke Takeuchi
- Takamasa Horibe
- Takayuki Murooka
Authors
Control data collecting tool
This package provides tools for automatically collecting data using pure pursuit control within a specified rectangular area.
Overview
- This package aims to collect a dataset consisting of control inputs (i.e.
control_cmd) and observation variables (i.e.kinematic_state,steering_status, etc). - The collected dataset can be used as training dataset for learning-based controllers, including smart_mpc.
- Data collecting approach is as follows:
- Following the trajectory using a pure pursuit control law.
- Adding noises to the trajectory and the control command for data diversity, improving the prediction accuracy of learning model.
- Setting the trajectory from the following types of trajectories ( [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle,along_road] ).-
COURSE_NAME: eight_course -
COURSE_NAME: u_shaped_return -
COURSE_NAME: straight_line_positiveorCOURSE_NAME: straight_line_negative( Both “straight_line_positive” and “straight_line_negative” represent straight line courses, but the direction of travel of the course is reversed.)
-
COURSE_NAME: reversal_loop_circleDrive within a circle while adding trajectories and collect data.
-
COURSE_NAME: along_roadGenerate trajectories along the road. This is particularly useful when drawing long straight paths along the road.
In this course, data collection is conducted only on long straight trajectories, while constant velocity,
velocity_on_curve, is maintained when driving on sections that include curves.The minimum length of these long straight trajectories can be specified using the parameter
minimum_length_of_straight_line(These two parametersvelocity_on_curveandminimum_length_of_straight_linecan be configured in./config/course_param/along_road_param.yaml).
-
How to Use
- Launch Autoware.
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
-
Set an initial pose, see here.
-
Add the DataCollectingAreaSelectionTool and DataCollectingGoalPlugin RViz plugins by clicking the “+” icon at the top of the RViz window.
-
Launch control_data_collecting_tool.
ros2 launch control_data_collecting_tool control_data_collecting_tool.launch.py map_path:=$HOME/autoware_map/sample-map-planning accel_brake_map_path:=/path/to/your/accel_brake_map_dir
- If you use the `along_road` course, please specify the same map for `map_path` as the one used when launching Autoware. `map_path` is not necessary when using courses other than `along_road`.
- If you set CONTROL_MODE to actuation_cmd or external_actuation_cmd, please specify the directory where the accel/brake maps used by your control system are located.
- Control data collecting tool automatically records topics included in `config/topics.yaml` when the above command is executed. Topics will be saved in rosbag2 format in the current directory.
- The data from `/localization/kinematic_state` and `/localization/acceleration` located in the directory (rosbag2 format) where the command is executed will be automatically loaded and reflected in the data count for these topics.
(If `LOAD_ROSBAG2_FILES` in `config/param.yaml` is set to `false`, the data is not loaded.)
-
Add visualization in rviz:
-
/data_collecting_area- Type: Polygon
-
/data_collecting_trajectory_marker_array- Type: MarkerArray
-
/data_collecting_lookahead_marker_array- Type: MarkerArray
-
-
The following actions differ depending on the selected course. If you select the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], please proceed to 6.1. If you select the trajectory from [along_road], please proceed to 6.2.-
6.1 If you choose the trajectory from [
eight_course,u_shaped_return,straight_line_positive,straight_line_negative,reversal_loop_circle], selectDataCollectingAreaSelectionToolplugin.Highlight the data collecting area by dragging the mouse over it.
[!NOTE] You cannot change the data collecting area while driving.
-
6.2 If you choose the trajectory from [
along_road], selectDataCollectingGoalPoseplugin.
-
File truncated at 100 lines see the full file
Changelog for package control_data_collecting_tool
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
-
style(pre-commit): autofix (#275)
- apply pre-commit
* fix: add maintainer in planning_debug tools package.xml ---------
-
Contributors: Kyoichi Sugahara
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
feat(control_data_collecting_tool): add constant acceleration/actuation mode (#185)
- Add actuation mode
- Temporarily added data_collecting_pure_pursuit_trajectory_follower.py
- Remove data_collecting_pure_pursuit_trajectory_follower.py
- Add constant cmd scripts
- Add pedal threshold for data counting
- pre-commit run
- Add some comments
- Update install programs
- Update params
- pre-commit run
- Update README
- The bullet points were changed from numbers to letters.
- Update print message
- Fix bug and typo
- Update README
- pre-commit run
* Update control_data_collecting_tool/README.md ---------Co-authored-by: Kosuke Takeuchi <<kosuke.tnp@gmail.com>>
-
feat(control_data_collecting_tool): improve README and a slight modification to the data collection logic (#179)
- Improve README
- Modify data collction logic
- Final adjustment
- Spelling correction
- pre-commit run
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
chore: sync files (#11) Co-authored-by: github-actions <<github-actions@github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat(control_data_collecting_tool): add masks to specify data collection range (#167)
- Add trajectory inside circle
- Fix bug
- Add lanelet2 trajectory
- pre-commit run
- Fix bug
- pre-commit
- Update README.md
- Add parameter descriptions to the README
- style(pre-commit): autofix
- Revise the content
- style(pre-commit): autofix
- Update README
- Update README
- Add comments
- Update prameters for along_road course
- style(pre-commit): autofix
- Add default mask and mask selector
- Add mask to plotter
- Data collection concerning Mask
- Modify the code to publish the pose
- style(pre-commit): autofix
- Modify to work even when map_path is not provided
- Add steer rate plot
- Update README.md and fix typo
File truncated at 100 lines see the full file