
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Berkay Karaman
Authors
- Berkay Karaman
Reaction Analyzer
Description
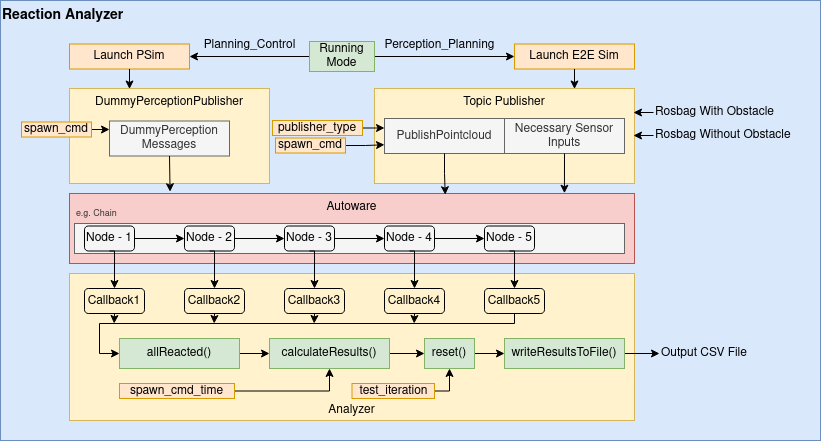
The main purpose of the reaction analyzer package is to measure the reaction times of various nodes within a ROS-based
autonomous driving simulation environment by subscribing to pre-determined topics. This tool is particularly useful for
evaluating the performance of perception, planning, and control pipelines in response to dynamic changes in the
environment, such as sudden obstacles. To be able to measure both control outputs and perception outputs, it was
necessary to divide the node into two running_mode: planning_control and perception_planning.
Planning Control Mode
In this mode, the reaction analyzer creates a dummy publisher for the PredictedObjects and PointCloud2 topics. In the
beginning of the test, it publishes the initial position of the ego vehicle and the goal position to set the test
environment. Then, it spawns a sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to
search reacted messages of the planning and control nodes in the pre-determined topics. When all the topics are reacted,
it calculates the reaction time of the nodes and statistics by comparing reacted_times of each of the nodes
with spawn_cmd_time, and it creates a csv file to store the results.
Perception Planning Mode
In this mode, the reaction analyzer reads the rosbag files which are recorded from AWSIM, and it creates a topic
publisher for each topic inside the rosbag to replay the rosbag. It reads two rosbag files: path_bag_without_object
and path_bag_with_object. Firstly, it replays the path_bag_without_object to set the initial position of the ego
vehicle and the goal position. After spawn_time_after_init seconds , it replays the path_bag_with_object to spawn a
sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to search the reacted messages of
the perception and planning nodes in the pre-determined topics. When all the topics are reacted, it calculates the
reaction time of the nodes and statistics by comparing reacted_times of each of the nodes with spawn_cmd_time, and
it creates a csv file to store the results.
Point Cloud Publisher Type
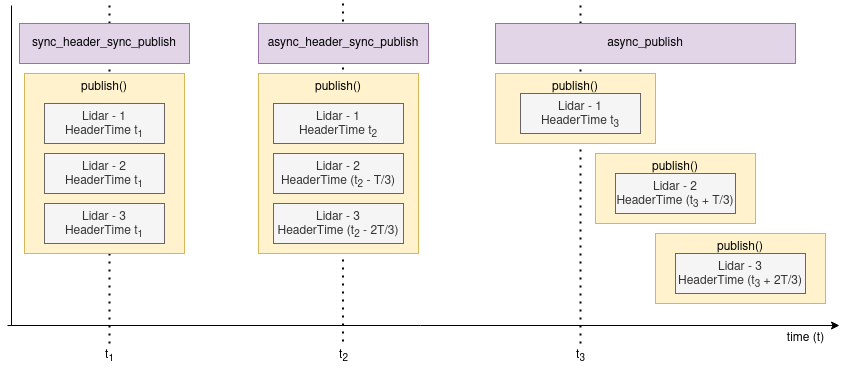
To get better analyze for Perception & Sensing pipeline, the reaction analyzer can publish the point cloud messages in 3
different ways: async_header_sync_publish, sync_header_sync_publish or async_publish. (T is the period of the
lidar’s output)
-
async_header_sync_publish: It publishes the point cloud messages synchronously with asynchronous header times. It means that each of the lidar’s output will be published at the same time, but the headers of the point cloud messages includes different timestamps because of the phase difference. -
sync_header_sync_publish: It publishes the point cloud messages synchronously with synchronous header times. It means that each of the lidar’s output will be published at the same time, and the headers of the point cloud messages includes the same timestamps. -
async_publish: It publishes the point cloud messages asynchronously. It means that each of the lidar’s output will be published at different times.
Usage
The common parameters you need to define for both running modes are output_file_path, test_iteration,
and reaction_chain list. output_file_path is the output file path is the path where the results and statistics
will be stored. test_iteration defines how many tests will be performed. The reaction_chain list is the list of the
pre-defined topics you want to measure their reaction times.
IMPORTANT: Ensure the reaction_chain list is correctly defined:
- For
perception_planningmode, do not defineControlnodes. - For
planning_controlmode, do not definePerceptionnodes.
Prepared Test Environment
- Download the demonstration test map from the
link here. After
downloading,
extract the zip file and use its path as
[MAP_PATH]in the following commands.
Planning Control Mode
- You need to define only Planning and Control nodes in the
reaction_chainlist. With the default parameters, you can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=planning_control vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit map_path:=[MAP_PATH]
After the command, the simple_planning_simulator and the reaction_analyzer will be launched. It will automatically
start to test. After the test is completed, the results will be stored in the output_file_path you defined.
Perception Planning Mode
- Download the rosbag files from the Google Drive link <❌ link is no longer available.>.
- Extract the zip file and set the path of the
.db3files to parameterspath_bag_without_objectandpath_bag_with_object. - You can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=perception_planning vehicle_model:=sample_vehicle sensor_model:=awsim_labs_sensor_kit map_path:=[MAP_PATH]
- On the first run of the tool in perception_planning mode, initialization might take longer than expected. Please allow some time for the process to complete.
After the command, the e2e_simulator and the reaction_analyzer will be launched. It will automatically start
to test. After the test is completed, the results will be stored in the output_file_path you defined.
Prepared Test Environment
Scene without object:
File truncated at 100 lines see the full file
Changelog for package reaction_analyzer
0.6.0 (2026-02-14)
- chore: match package versions
- feat(reaction_analyzer): move package from autoware_universe (#329) this package is moved from https://github.com/autowarefoundation/autoware_universe/pull/11807 ---------Co-authored-by: Berkay Karaman <<berkay@leodrive.ai>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>> Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: kobayu858 <<129580202+kobayu858@users.noreply.github.com>> Co-authored-by: SakodaShintaro <<shintaro.sakoda@tier4.jp>> Co-authored-by: Batuhan Beytekin <<71197983+batuhanbeytekin@users.noreply.github.com>> Co-authored-by: Yutaka Kondo <<yutaka.kondo@youtalk.jp>> Co-authored-by: Esteve Fernandez <<33620+esteve@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: 心刚 <<90366790+liuXinGangChina@users.noreply.github.com>> Co-authored-by: Hayato Mizushima <<hayato-m126@users.noreply.github.com>> Co-authored-by: Taiki Yamada <<129915538+TaikiYamada4@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Mete Fatih Cırıt <<mfc@autoware.org>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Takatoshi Kondo <<redboltz@gmail.com>> Co-authored-by: Shumpei Wakabayashi <<42209144+shmpwk@users.noreply.github.com>> Co-authored-by: Junya Sasaki <<junya.sasaki@tier4.jp>>
- Contributors: Ryohsuke Mitsudome, Takagi, Isamu
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
| libpcl-all-dev |
Dependant Packages
Launch files
- launch/reaction_analyzer.launch.xml
-
- reaction_analyzer_param_path [default: $(find-pkg-share reaction_analyzer)/param/reaction_analyzer.param.yaml]
- launch_simulator_perception_modules [default: false]
- laserscan_based_occupancy_grid_map_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/laserscan_based_occupancy_grid_map.param.yaml]
- occupancy_grid_map_updater [default: binary_bayes_filter]
- occupancy_grid_map_updater_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/$(var occupancy_grid_map_updater)_updater.param.yaml]
- running_mode [default: planning_control]
- map_path
- vehicle_model [default: sample_vehicle]
- sensor_model [default: sample_sensor_kit]
Messages
Services
Plugins
Recent questions tagged reaction_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Berkay Karaman
Authors
- Berkay Karaman
Reaction Analyzer
Description
The main purpose of the reaction analyzer package is to measure the reaction times of various nodes within a ROS-based
autonomous driving simulation environment by subscribing to pre-determined topics. This tool is particularly useful for
evaluating the performance of perception, planning, and control pipelines in response to dynamic changes in the
environment, such as sudden obstacles. To be able to measure both control outputs and perception outputs, it was
necessary to divide the node into two running_mode: planning_control and perception_planning.
Planning Control Mode
In this mode, the reaction analyzer creates a dummy publisher for the PredictedObjects and PointCloud2 topics. In the
beginning of the test, it publishes the initial position of the ego vehicle and the goal position to set the test
environment. Then, it spawns a sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to
search reacted messages of the planning and control nodes in the pre-determined topics. When all the topics are reacted,
it calculates the reaction time of the nodes and statistics by comparing reacted_times of each of the nodes
with spawn_cmd_time, and it creates a csv file to store the results.
Perception Planning Mode
In this mode, the reaction analyzer reads the rosbag files which are recorded from AWSIM, and it creates a topic
publisher for each topic inside the rosbag to replay the rosbag. It reads two rosbag files: path_bag_without_object
and path_bag_with_object. Firstly, it replays the path_bag_without_object to set the initial position of the ego
vehicle and the goal position. After spawn_time_after_init seconds , it replays the path_bag_with_object to spawn a
sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to search the reacted messages of
the perception and planning nodes in the pre-determined topics. When all the topics are reacted, it calculates the
reaction time of the nodes and statistics by comparing reacted_times of each of the nodes with spawn_cmd_time, and
it creates a csv file to store the results.
Point Cloud Publisher Type
To get better analyze for Perception & Sensing pipeline, the reaction analyzer can publish the point cloud messages in 3
different ways: async_header_sync_publish, sync_header_sync_publish or async_publish. (T is the period of the
lidar’s output)
-
async_header_sync_publish: It publishes the point cloud messages synchronously with asynchronous header times. It means that each of the lidar’s output will be published at the same time, but the headers of the point cloud messages includes different timestamps because of the phase difference. -
sync_header_sync_publish: It publishes the point cloud messages synchronously with synchronous header times. It means that each of the lidar’s output will be published at the same time, and the headers of the point cloud messages includes the same timestamps. -
async_publish: It publishes the point cloud messages asynchronously. It means that each of the lidar’s output will be published at different times.
Usage
The common parameters you need to define for both running modes are output_file_path, test_iteration,
and reaction_chain list. output_file_path is the output file path is the path where the results and statistics
will be stored. test_iteration defines how many tests will be performed. The reaction_chain list is the list of the
pre-defined topics you want to measure their reaction times.
IMPORTANT: Ensure the reaction_chain list is correctly defined:
- For
perception_planningmode, do not defineControlnodes. - For
planning_controlmode, do not definePerceptionnodes.
Prepared Test Environment
- Download the demonstration test map from the
link here. After
downloading,
extract the zip file and use its path as
[MAP_PATH]in the following commands.
Planning Control Mode
- You need to define only Planning and Control nodes in the
reaction_chainlist. With the default parameters, you can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=planning_control vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit map_path:=[MAP_PATH]
After the command, the simple_planning_simulator and the reaction_analyzer will be launched. It will automatically
start to test. After the test is completed, the results will be stored in the output_file_path you defined.
Perception Planning Mode
- Download the rosbag files from the Google Drive link <❌ link is no longer available.>.
- Extract the zip file and set the path of the
.db3files to parameterspath_bag_without_objectandpath_bag_with_object. - You can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=perception_planning vehicle_model:=sample_vehicle sensor_model:=awsim_labs_sensor_kit map_path:=[MAP_PATH]
- On the first run of the tool in perception_planning mode, initialization might take longer than expected. Please allow some time for the process to complete.
After the command, the e2e_simulator and the reaction_analyzer will be launched. It will automatically start
to test. After the test is completed, the results will be stored in the output_file_path you defined.
Prepared Test Environment
Scene without object:
File truncated at 100 lines see the full file
Changelog for package reaction_analyzer
0.6.0 (2026-02-14)
- chore: match package versions
- feat(reaction_analyzer): move package from autoware_universe (#329) this package is moved from https://github.com/autowarefoundation/autoware_universe/pull/11807 ---------Co-authored-by: Berkay Karaman <<berkay@leodrive.ai>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>> Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: kobayu858 <<129580202+kobayu858@users.noreply.github.com>> Co-authored-by: SakodaShintaro <<shintaro.sakoda@tier4.jp>> Co-authored-by: Batuhan Beytekin <<71197983+batuhanbeytekin@users.noreply.github.com>> Co-authored-by: Yutaka Kondo <<yutaka.kondo@youtalk.jp>> Co-authored-by: Esteve Fernandez <<33620+esteve@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: 心刚 <<90366790+liuXinGangChina@users.noreply.github.com>> Co-authored-by: Hayato Mizushima <<hayato-m126@users.noreply.github.com>> Co-authored-by: Taiki Yamada <<129915538+TaikiYamada4@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Mete Fatih Cırıt <<mfc@autoware.org>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Takatoshi Kondo <<redboltz@gmail.com>> Co-authored-by: Shumpei Wakabayashi <<42209144+shmpwk@users.noreply.github.com>> Co-authored-by: Junya Sasaki <<junya.sasaki@tier4.jp>>
- Contributors: Ryohsuke Mitsudome, Takagi, Isamu
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
| libpcl-all-dev |
Dependant Packages
Launch files
- launch/reaction_analyzer.launch.xml
-
- reaction_analyzer_param_path [default: $(find-pkg-share reaction_analyzer)/param/reaction_analyzer.param.yaml]
- launch_simulator_perception_modules [default: false]
- laserscan_based_occupancy_grid_map_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/laserscan_based_occupancy_grid_map.param.yaml]
- occupancy_grid_map_updater [default: binary_bayes_filter]
- occupancy_grid_map_updater_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/$(var occupancy_grid_map_updater)_updater.param.yaml]
- running_mode [default: planning_control]
- map_path
- vehicle_model [default: sample_vehicle]
- sensor_model [default: sample_sensor_kit]
Messages
Services
Plugins
Recent questions tagged reaction_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Berkay Karaman
Authors
- Berkay Karaman
Reaction Analyzer
Description
The main purpose of the reaction analyzer package is to measure the reaction times of various nodes within a ROS-based
autonomous driving simulation environment by subscribing to pre-determined topics. This tool is particularly useful for
evaluating the performance of perception, planning, and control pipelines in response to dynamic changes in the
environment, such as sudden obstacles. To be able to measure both control outputs and perception outputs, it was
necessary to divide the node into two running_mode: planning_control and perception_planning.
Planning Control Mode
In this mode, the reaction analyzer creates a dummy publisher for the PredictedObjects and PointCloud2 topics. In the
beginning of the test, it publishes the initial position of the ego vehicle and the goal position to set the test
environment. Then, it spawns a sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to
search reacted messages of the planning and control nodes in the pre-determined topics. When all the topics are reacted,
it calculates the reaction time of the nodes and statistics by comparing reacted_times of each of the nodes
with spawn_cmd_time, and it creates a csv file to store the results.
Perception Planning Mode
In this mode, the reaction analyzer reads the rosbag files which are recorded from AWSIM, and it creates a topic
publisher for each topic inside the rosbag to replay the rosbag. It reads two rosbag files: path_bag_without_object
and path_bag_with_object. Firstly, it replays the path_bag_without_object to set the initial position of the ego
vehicle and the goal position. After spawn_time_after_init seconds , it replays the path_bag_with_object to spawn a
sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to search the reacted messages of
the perception and planning nodes in the pre-determined topics. When all the topics are reacted, it calculates the
reaction time of the nodes and statistics by comparing reacted_times of each of the nodes with spawn_cmd_time, and
it creates a csv file to store the results.
Point Cloud Publisher Type
To get better analyze for Perception & Sensing pipeline, the reaction analyzer can publish the point cloud messages in 3
different ways: async_header_sync_publish, sync_header_sync_publish or async_publish. (T is the period of the
lidar’s output)
-
async_header_sync_publish: It publishes the point cloud messages synchronously with asynchronous header times. It means that each of the lidar’s output will be published at the same time, but the headers of the point cloud messages includes different timestamps because of the phase difference. -
sync_header_sync_publish: It publishes the point cloud messages synchronously with synchronous header times. It means that each of the lidar’s output will be published at the same time, and the headers of the point cloud messages includes the same timestamps. -
async_publish: It publishes the point cloud messages asynchronously. It means that each of the lidar’s output will be published at different times.
Usage
The common parameters you need to define for both running modes are output_file_path, test_iteration,
and reaction_chain list. output_file_path is the output file path is the path where the results and statistics
will be stored. test_iteration defines how many tests will be performed. The reaction_chain list is the list of the
pre-defined topics you want to measure their reaction times.
IMPORTANT: Ensure the reaction_chain list is correctly defined:
- For
perception_planningmode, do not defineControlnodes. - For
planning_controlmode, do not definePerceptionnodes.
Prepared Test Environment
- Download the demonstration test map from the
link here. After
downloading,
extract the zip file and use its path as
[MAP_PATH]in the following commands.
Planning Control Mode
- You need to define only Planning and Control nodes in the
reaction_chainlist. With the default parameters, you can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=planning_control vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit map_path:=[MAP_PATH]
After the command, the simple_planning_simulator and the reaction_analyzer will be launched. It will automatically
start to test. After the test is completed, the results will be stored in the output_file_path you defined.
Perception Planning Mode
- Download the rosbag files from the Google Drive link <❌ link is no longer available.>.
- Extract the zip file and set the path of the
.db3files to parameterspath_bag_without_objectandpath_bag_with_object. - You can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=perception_planning vehicle_model:=sample_vehicle sensor_model:=awsim_labs_sensor_kit map_path:=[MAP_PATH]
- On the first run of the tool in perception_planning mode, initialization might take longer than expected. Please allow some time for the process to complete.
After the command, the e2e_simulator and the reaction_analyzer will be launched. It will automatically start
to test. After the test is completed, the results will be stored in the output_file_path you defined.
Prepared Test Environment
Scene without object:
File truncated at 100 lines see the full file
Changelog for package reaction_analyzer
0.6.0 (2026-02-14)
- chore: match package versions
- feat(reaction_analyzer): move package from autoware_universe (#329) this package is moved from https://github.com/autowarefoundation/autoware_universe/pull/11807 ---------Co-authored-by: Berkay Karaman <<berkay@leodrive.ai>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>> Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: kobayu858 <<129580202+kobayu858@users.noreply.github.com>> Co-authored-by: SakodaShintaro <<shintaro.sakoda@tier4.jp>> Co-authored-by: Batuhan Beytekin <<71197983+batuhanbeytekin@users.noreply.github.com>> Co-authored-by: Yutaka Kondo <<yutaka.kondo@youtalk.jp>> Co-authored-by: Esteve Fernandez <<33620+esteve@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: 心刚 <<90366790+liuXinGangChina@users.noreply.github.com>> Co-authored-by: Hayato Mizushima <<hayato-m126@users.noreply.github.com>> Co-authored-by: Taiki Yamada <<129915538+TaikiYamada4@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Mete Fatih Cırıt <<mfc@autoware.org>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Takatoshi Kondo <<redboltz@gmail.com>> Co-authored-by: Shumpei Wakabayashi <<42209144+shmpwk@users.noreply.github.com>> Co-authored-by: Junya Sasaki <<junya.sasaki@tier4.jp>>
- Contributors: Ryohsuke Mitsudome, Takagi, Isamu
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
| libpcl-all-dev |
Dependant Packages
Launch files
- launch/reaction_analyzer.launch.xml
-
- reaction_analyzer_param_path [default: $(find-pkg-share reaction_analyzer)/param/reaction_analyzer.param.yaml]
- launch_simulator_perception_modules [default: false]
- laserscan_based_occupancy_grid_map_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/laserscan_based_occupancy_grid_map.param.yaml]
- occupancy_grid_map_updater [default: binary_bayes_filter]
- occupancy_grid_map_updater_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/$(var occupancy_grid_map_updater)_updater.param.yaml]
- running_mode [default: planning_control]
- map_path
- vehicle_model [default: sample_vehicle]
- sensor_model [default: sample_sensor_kit]
Messages
Services
Plugins
Recent questions tagged reaction_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Berkay Karaman
Authors
- Berkay Karaman
Reaction Analyzer
Description
The main purpose of the reaction analyzer package is to measure the reaction times of various nodes within a ROS-based
autonomous driving simulation environment by subscribing to pre-determined topics. This tool is particularly useful for
evaluating the performance of perception, planning, and control pipelines in response to dynamic changes in the
environment, such as sudden obstacles. To be able to measure both control outputs and perception outputs, it was
necessary to divide the node into two running_mode: planning_control and perception_planning.
Planning Control Mode
In this mode, the reaction analyzer creates a dummy publisher for the PredictedObjects and PointCloud2 topics. In the
beginning of the test, it publishes the initial position of the ego vehicle and the goal position to set the test
environment. Then, it spawns a sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to
search reacted messages of the planning and control nodes in the pre-determined topics. When all the topics are reacted,
it calculates the reaction time of the nodes and statistics by comparing reacted_times of each of the nodes
with spawn_cmd_time, and it creates a csv file to store the results.
Perception Planning Mode
In this mode, the reaction analyzer reads the rosbag files which are recorded from AWSIM, and it creates a topic
publisher for each topic inside the rosbag to replay the rosbag. It reads two rosbag files: path_bag_without_object
and path_bag_with_object. Firstly, it replays the path_bag_without_object to set the initial position of the ego
vehicle and the goal position. After spawn_time_after_init seconds , it replays the path_bag_with_object to spawn a
sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to search the reacted messages of
the perception and planning nodes in the pre-determined topics. When all the topics are reacted, it calculates the
reaction time of the nodes and statistics by comparing reacted_times of each of the nodes with spawn_cmd_time, and
it creates a csv file to store the results.
Point Cloud Publisher Type
To get better analyze for Perception & Sensing pipeline, the reaction analyzer can publish the point cloud messages in 3
different ways: async_header_sync_publish, sync_header_sync_publish or async_publish. (T is the period of the
lidar’s output)
-
async_header_sync_publish: It publishes the point cloud messages synchronously with asynchronous header times. It means that each of the lidar’s output will be published at the same time, but the headers of the point cloud messages includes different timestamps because of the phase difference. -
sync_header_sync_publish: It publishes the point cloud messages synchronously with synchronous header times. It means that each of the lidar’s output will be published at the same time, and the headers of the point cloud messages includes the same timestamps. -
async_publish: It publishes the point cloud messages asynchronously. It means that each of the lidar’s output will be published at different times.
Usage
The common parameters you need to define for both running modes are output_file_path, test_iteration,
and reaction_chain list. output_file_path is the output file path is the path where the results and statistics
will be stored. test_iteration defines how many tests will be performed. The reaction_chain list is the list of the
pre-defined topics you want to measure their reaction times.
IMPORTANT: Ensure the reaction_chain list is correctly defined:
- For
perception_planningmode, do not defineControlnodes. - For
planning_controlmode, do not definePerceptionnodes.
Prepared Test Environment
- Download the demonstration test map from the
link here. After
downloading,
extract the zip file and use its path as
[MAP_PATH]in the following commands.
Planning Control Mode
- You need to define only Planning and Control nodes in the
reaction_chainlist. With the default parameters, you can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=planning_control vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit map_path:=[MAP_PATH]
After the command, the simple_planning_simulator and the reaction_analyzer will be launched. It will automatically
start to test. After the test is completed, the results will be stored in the output_file_path you defined.
Perception Planning Mode
- Download the rosbag files from the Google Drive link <❌ link is no longer available.>.
- Extract the zip file and set the path of the
.db3files to parameterspath_bag_without_objectandpath_bag_with_object. - You can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=perception_planning vehicle_model:=sample_vehicle sensor_model:=awsim_labs_sensor_kit map_path:=[MAP_PATH]
- On the first run of the tool in perception_planning mode, initialization might take longer than expected. Please allow some time for the process to complete.
After the command, the e2e_simulator and the reaction_analyzer will be launched. It will automatically start
to test. After the test is completed, the results will be stored in the output_file_path you defined.
Prepared Test Environment
Scene without object:
File truncated at 100 lines see the full file
Changelog for package reaction_analyzer
0.6.0 (2026-02-14)
- chore: match package versions
- feat(reaction_analyzer): move package from autoware_universe (#329) this package is moved from https://github.com/autowarefoundation/autoware_universe/pull/11807 ---------Co-authored-by: Berkay Karaman <<berkay@leodrive.ai>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>> Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: kobayu858 <<129580202+kobayu858@users.noreply.github.com>> Co-authored-by: SakodaShintaro <<shintaro.sakoda@tier4.jp>> Co-authored-by: Batuhan Beytekin <<71197983+batuhanbeytekin@users.noreply.github.com>> Co-authored-by: Yutaka Kondo <<yutaka.kondo@youtalk.jp>> Co-authored-by: Esteve Fernandez <<33620+esteve@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: 心刚 <<90366790+liuXinGangChina@users.noreply.github.com>> Co-authored-by: Hayato Mizushima <<hayato-m126@users.noreply.github.com>> Co-authored-by: Taiki Yamada <<129915538+TaikiYamada4@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Mete Fatih Cırıt <<mfc@autoware.org>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Takatoshi Kondo <<redboltz@gmail.com>> Co-authored-by: Shumpei Wakabayashi <<42209144+shmpwk@users.noreply.github.com>> Co-authored-by: Junya Sasaki <<junya.sasaki@tier4.jp>>
- Contributors: Ryohsuke Mitsudome, Takagi, Isamu
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
| libpcl-all-dev |
Dependant Packages
Launch files
- launch/reaction_analyzer.launch.xml
-
- reaction_analyzer_param_path [default: $(find-pkg-share reaction_analyzer)/param/reaction_analyzer.param.yaml]
- launch_simulator_perception_modules [default: false]
- laserscan_based_occupancy_grid_map_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/laserscan_based_occupancy_grid_map.param.yaml]
- occupancy_grid_map_updater [default: binary_bayes_filter]
- occupancy_grid_map_updater_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/$(var occupancy_grid_map_updater)_updater.param.yaml]
- running_mode [default: planning_control]
- map_path
- vehicle_model [default: sample_vehicle]
- sensor_model [default: sample_sensor_kit]
Messages
Services
Plugins
Recent questions tagged reaction_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Berkay Karaman
Authors
- Berkay Karaman
Reaction Analyzer
Description
The main purpose of the reaction analyzer package is to measure the reaction times of various nodes within a ROS-based
autonomous driving simulation environment by subscribing to pre-determined topics. This tool is particularly useful for
evaluating the performance of perception, planning, and control pipelines in response to dynamic changes in the
environment, such as sudden obstacles. To be able to measure both control outputs and perception outputs, it was
necessary to divide the node into two running_mode: planning_control and perception_planning.
Planning Control Mode
In this mode, the reaction analyzer creates a dummy publisher for the PredictedObjects and PointCloud2 topics. In the
beginning of the test, it publishes the initial position of the ego vehicle and the goal position to set the test
environment. Then, it spawns a sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to
search reacted messages of the planning and control nodes in the pre-determined topics. When all the topics are reacted,
it calculates the reaction time of the nodes and statistics by comparing reacted_times of each of the nodes
with spawn_cmd_time, and it creates a csv file to store the results.
Perception Planning Mode
In this mode, the reaction analyzer reads the rosbag files which are recorded from AWSIM, and it creates a topic
publisher for each topic inside the rosbag to replay the rosbag. It reads two rosbag files: path_bag_without_object
and path_bag_with_object. Firstly, it replays the path_bag_without_object to set the initial position of the ego
vehicle and the goal position. After spawn_time_after_init seconds , it replays the path_bag_with_object to spawn a
sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to search the reacted messages of
the perception and planning nodes in the pre-determined topics. When all the topics are reacted, it calculates the
reaction time of the nodes and statistics by comparing reacted_times of each of the nodes with spawn_cmd_time, and
it creates a csv file to store the results.
Point Cloud Publisher Type
To get better analyze for Perception & Sensing pipeline, the reaction analyzer can publish the point cloud messages in 3
different ways: async_header_sync_publish, sync_header_sync_publish or async_publish. (T is the period of the
lidar’s output)
-
async_header_sync_publish: It publishes the point cloud messages synchronously with asynchronous header times. It means that each of the lidar’s output will be published at the same time, but the headers of the point cloud messages includes different timestamps because of the phase difference. -
sync_header_sync_publish: It publishes the point cloud messages synchronously with synchronous header times. It means that each of the lidar’s output will be published at the same time, and the headers of the point cloud messages includes the same timestamps. -
async_publish: It publishes the point cloud messages asynchronously. It means that each of the lidar’s output will be published at different times.
Usage
The common parameters you need to define for both running modes are output_file_path, test_iteration,
and reaction_chain list. output_file_path is the output file path is the path where the results and statistics
will be stored. test_iteration defines how many tests will be performed. The reaction_chain list is the list of the
pre-defined topics you want to measure their reaction times.
IMPORTANT: Ensure the reaction_chain list is correctly defined:
- For
perception_planningmode, do not defineControlnodes. - For
planning_controlmode, do not definePerceptionnodes.
Prepared Test Environment
- Download the demonstration test map from the
link here. After
downloading,
extract the zip file and use its path as
[MAP_PATH]in the following commands.
Planning Control Mode
- You need to define only Planning and Control nodes in the
reaction_chainlist. With the default parameters, you can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=planning_control vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit map_path:=[MAP_PATH]
After the command, the simple_planning_simulator and the reaction_analyzer will be launched. It will automatically
start to test. After the test is completed, the results will be stored in the output_file_path you defined.
Perception Planning Mode
- Download the rosbag files from the Google Drive link <❌ link is no longer available.>.
- Extract the zip file and set the path of the
.db3files to parameterspath_bag_without_objectandpath_bag_with_object. - You can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=perception_planning vehicle_model:=sample_vehicle sensor_model:=awsim_labs_sensor_kit map_path:=[MAP_PATH]
- On the first run of the tool in perception_planning mode, initialization might take longer than expected. Please allow some time for the process to complete.
After the command, the e2e_simulator and the reaction_analyzer will be launched. It will automatically start
to test. After the test is completed, the results will be stored in the output_file_path you defined.
Prepared Test Environment
Scene without object:
File truncated at 100 lines see the full file
Changelog for package reaction_analyzer
0.6.0 (2026-02-14)
- chore: match package versions
- feat(reaction_analyzer): move package from autoware_universe (#329) this package is moved from https://github.com/autowarefoundation/autoware_universe/pull/11807 ---------Co-authored-by: Berkay Karaman <<berkay@leodrive.ai>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>> Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: kobayu858 <<129580202+kobayu858@users.noreply.github.com>> Co-authored-by: SakodaShintaro <<shintaro.sakoda@tier4.jp>> Co-authored-by: Batuhan Beytekin <<71197983+batuhanbeytekin@users.noreply.github.com>> Co-authored-by: Yutaka Kondo <<yutaka.kondo@youtalk.jp>> Co-authored-by: Esteve Fernandez <<33620+esteve@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: 心刚 <<90366790+liuXinGangChina@users.noreply.github.com>> Co-authored-by: Hayato Mizushima <<hayato-m126@users.noreply.github.com>> Co-authored-by: Taiki Yamada <<129915538+TaikiYamada4@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Mete Fatih Cırıt <<mfc@autoware.org>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Takatoshi Kondo <<redboltz@gmail.com>> Co-authored-by: Shumpei Wakabayashi <<42209144+shmpwk@users.noreply.github.com>> Co-authored-by: Junya Sasaki <<junya.sasaki@tier4.jp>>
- Contributors: Ryohsuke Mitsudome, Takagi, Isamu
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
| libpcl-all-dev |
Dependant Packages
Launch files
- launch/reaction_analyzer.launch.xml
-
- reaction_analyzer_param_path [default: $(find-pkg-share reaction_analyzer)/param/reaction_analyzer.param.yaml]
- launch_simulator_perception_modules [default: false]
- laserscan_based_occupancy_grid_map_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/laserscan_based_occupancy_grid_map.param.yaml]
- occupancy_grid_map_updater [default: binary_bayes_filter]
- occupancy_grid_map_updater_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/$(var occupancy_grid_map_updater)_updater.param.yaml]
- running_mode [default: planning_control]
- map_path
- vehicle_model [default: sample_vehicle]
- sensor_model [default: sample_sensor_kit]
Messages
Services
Plugins
Recent questions tagged reaction_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Berkay Karaman
Authors
- Berkay Karaman
Reaction Analyzer
Description
The main purpose of the reaction analyzer package is to measure the reaction times of various nodes within a ROS-based
autonomous driving simulation environment by subscribing to pre-determined topics. This tool is particularly useful for
evaluating the performance of perception, planning, and control pipelines in response to dynamic changes in the
environment, such as sudden obstacles. To be able to measure both control outputs and perception outputs, it was
necessary to divide the node into two running_mode: planning_control and perception_planning.
Planning Control Mode
In this mode, the reaction analyzer creates a dummy publisher for the PredictedObjects and PointCloud2 topics. In the
beginning of the test, it publishes the initial position of the ego vehicle and the goal position to set the test
environment. Then, it spawns a sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to
search reacted messages of the planning and control nodes in the pre-determined topics. When all the topics are reacted,
it calculates the reaction time of the nodes and statistics by comparing reacted_times of each of the nodes
with spawn_cmd_time, and it creates a csv file to store the results.
Perception Planning Mode
In this mode, the reaction analyzer reads the rosbag files which are recorded from AWSIM, and it creates a topic
publisher for each topic inside the rosbag to replay the rosbag. It reads two rosbag files: path_bag_without_object
and path_bag_with_object. Firstly, it replays the path_bag_without_object to set the initial position of the ego
vehicle and the goal position. After spawn_time_after_init seconds , it replays the path_bag_with_object to spawn a
sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to search the reacted messages of
the perception and planning nodes in the pre-determined topics. When all the topics are reacted, it calculates the
reaction time of the nodes and statistics by comparing reacted_times of each of the nodes with spawn_cmd_time, and
it creates a csv file to store the results.
Point Cloud Publisher Type
To get better analyze for Perception & Sensing pipeline, the reaction analyzer can publish the point cloud messages in 3
different ways: async_header_sync_publish, sync_header_sync_publish or async_publish. (T is the period of the
lidar’s output)
-
async_header_sync_publish: It publishes the point cloud messages synchronously with asynchronous header times. It means that each of the lidar’s output will be published at the same time, but the headers of the point cloud messages includes different timestamps because of the phase difference. -
sync_header_sync_publish: It publishes the point cloud messages synchronously with synchronous header times. It means that each of the lidar’s output will be published at the same time, and the headers of the point cloud messages includes the same timestamps. -
async_publish: It publishes the point cloud messages asynchronously. It means that each of the lidar’s output will be published at different times.
Usage
The common parameters you need to define for both running modes are output_file_path, test_iteration,
and reaction_chain list. output_file_path is the output file path is the path where the results and statistics
will be stored. test_iteration defines how many tests will be performed. The reaction_chain list is the list of the
pre-defined topics you want to measure their reaction times.
IMPORTANT: Ensure the reaction_chain list is correctly defined:
- For
perception_planningmode, do not defineControlnodes. - For
planning_controlmode, do not definePerceptionnodes.
Prepared Test Environment
- Download the demonstration test map from the
link here. After
downloading,
extract the zip file and use its path as
[MAP_PATH]in the following commands.
Planning Control Mode
- You need to define only Planning and Control nodes in the
reaction_chainlist. With the default parameters, you can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=planning_control vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit map_path:=[MAP_PATH]
After the command, the simple_planning_simulator and the reaction_analyzer will be launched. It will automatically
start to test. After the test is completed, the results will be stored in the output_file_path you defined.
Perception Planning Mode
- Download the rosbag files from the Google Drive link <❌ link is no longer available.>.
- Extract the zip file and set the path of the
.db3files to parameterspath_bag_without_objectandpath_bag_with_object. - You can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=perception_planning vehicle_model:=sample_vehicle sensor_model:=awsim_labs_sensor_kit map_path:=[MAP_PATH]
- On the first run of the tool in perception_planning mode, initialization might take longer than expected. Please allow some time for the process to complete.
After the command, the e2e_simulator and the reaction_analyzer will be launched. It will automatically start
to test. After the test is completed, the results will be stored in the output_file_path you defined.
Prepared Test Environment
Scene without object:
File truncated at 100 lines see the full file
Changelog for package reaction_analyzer
0.6.0 (2026-02-14)
- chore: match package versions
- feat(reaction_analyzer): move package from autoware_universe (#329) this package is moved from https://github.com/autowarefoundation/autoware_universe/pull/11807 ---------Co-authored-by: Berkay Karaman <<berkay@leodrive.ai>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>> Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: kobayu858 <<129580202+kobayu858@users.noreply.github.com>> Co-authored-by: SakodaShintaro <<shintaro.sakoda@tier4.jp>> Co-authored-by: Batuhan Beytekin <<71197983+batuhanbeytekin@users.noreply.github.com>> Co-authored-by: Yutaka Kondo <<yutaka.kondo@youtalk.jp>> Co-authored-by: Esteve Fernandez <<33620+esteve@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: 心刚 <<90366790+liuXinGangChina@users.noreply.github.com>> Co-authored-by: Hayato Mizushima <<hayato-m126@users.noreply.github.com>> Co-authored-by: Taiki Yamada <<129915538+TaikiYamada4@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Mete Fatih Cırıt <<mfc@autoware.org>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Takatoshi Kondo <<redboltz@gmail.com>> Co-authored-by: Shumpei Wakabayashi <<42209144+shmpwk@users.noreply.github.com>> Co-authored-by: Junya Sasaki <<junya.sasaki@tier4.jp>>
- Contributors: Ryohsuke Mitsudome, Takagi, Isamu
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
| libpcl-all-dev |
Dependant Packages
Launch files
- launch/reaction_analyzer.launch.xml
-
- reaction_analyzer_param_path [default: $(find-pkg-share reaction_analyzer)/param/reaction_analyzer.param.yaml]
- launch_simulator_perception_modules [default: false]
- laserscan_based_occupancy_grid_map_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/laserscan_based_occupancy_grid_map.param.yaml]
- occupancy_grid_map_updater [default: binary_bayes_filter]
- occupancy_grid_map_updater_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/$(var occupancy_grid_map_updater)_updater.param.yaml]
- running_mode [default: planning_control]
- map_path
- vehicle_model [default: sample_vehicle]
- sensor_model [default: sample_sensor_kit]
Messages
Services
Plugins
Recent questions tagged reaction_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Berkay Karaman
Authors
- Berkay Karaman
Reaction Analyzer
Description
The main purpose of the reaction analyzer package is to measure the reaction times of various nodes within a ROS-based
autonomous driving simulation environment by subscribing to pre-determined topics. This tool is particularly useful for
evaluating the performance of perception, planning, and control pipelines in response to dynamic changes in the
environment, such as sudden obstacles. To be able to measure both control outputs and perception outputs, it was
necessary to divide the node into two running_mode: planning_control and perception_planning.
Planning Control Mode
In this mode, the reaction analyzer creates a dummy publisher for the PredictedObjects and PointCloud2 topics. In the
beginning of the test, it publishes the initial position of the ego vehicle and the goal position to set the test
environment. Then, it spawns a sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to
search reacted messages of the planning and control nodes in the pre-determined topics. When all the topics are reacted,
it calculates the reaction time of the nodes and statistics by comparing reacted_times of each of the nodes
with spawn_cmd_time, and it creates a csv file to store the results.
Perception Planning Mode
In this mode, the reaction analyzer reads the rosbag files which are recorded from AWSIM, and it creates a topic
publisher for each topic inside the rosbag to replay the rosbag. It reads two rosbag files: path_bag_without_object
and path_bag_with_object. Firstly, it replays the path_bag_without_object to set the initial position of the ego
vehicle and the goal position. After spawn_time_after_init seconds , it replays the path_bag_with_object to spawn a
sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to search the reacted messages of
the perception and planning nodes in the pre-determined topics. When all the topics are reacted, it calculates the
reaction time of the nodes and statistics by comparing reacted_times of each of the nodes with spawn_cmd_time, and
it creates a csv file to store the results.
Point Cloud Publisher Type
To get better analyze for Perception & Sensing pipeline, the reaction analyzer can publish the point cloud messages in 3
different ways: async_header_sync_publish, sync_header_sync_publish or async_publish. (T is the period of the
lidar’s output)
-
async_header_sync_publish: It publishes the point cloud messages synchronously with asynchronous header times. It means that each of the lidar’s output will be published at the same time, but the headers of the point cloud messages includes different timestamps because of the phase difference. -
sync_header_sync_publish: It publishes the point cloud messages synchronously with synchronous header times. It means that each of the lidar’s output will be published at the same time, and the headers of the point cloud messages includes the same timestamps. -
async_publish: It publishes the point cloud messages asynchronously. It means that each of the lidar’s output will be published at different times.
Usage
The common parameters you need to define for both running modes are output_file_path, test_iteration,
and reaction_chain list. output_file_path is the output file path is the path where the results and statistics
will be stored. test_iteration defines how many tests will be performed. The reaction_chain list is the list of the
pre-defined topics you want to measure their reaction times.
IMPORTANT: Ensure the reaction_chain list is correctly defined:
- For
perception_planningmode, do not defineControlnodes. - For
planning_controlmode, do not definePerceptionnodes.
Prepared Test Environment
- Download the demonstration test map from the
link here. After
downloading,
extract the zip file and use its path as
[MAP_PATH]in the following commands.
Planning Control Mode
- You need to define only Planning and Control nodes in the
reaction_chainlist. With the default parameters, you can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=planning_control vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit map_path:=[MAP_PATH]
After the command, the simple_planning_simulator and the reaction_analyzer will be launched. It will automatically
start to test. After the test is completed, the results will be stored in the output_file_path you defined.
Perception Planning Mode
- Download the rosbag files from the Google Drive link <❌ link is no longer available.>.
- Extract the zip file and set the path of the
.db3files to parameterspath_bag_without_objectandpath_bag_with_object. - You can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=perception_planning vehicle_model:=sample_vehicle sensor_model:=awsim_labs_sensor_kit map_path:=[MAP_PATH]
- On the first run of the tool in perception_planning mode, initialization might take longer than expected. Please allow some time for the process to complete.
After the command, the e2e_simulator and the reaction_analyzer will be launched. It will automatically start
to test. After the test is completed, the results will be stored in the output_file_path you defined.
Prepared Test Environment
Scene without object:
File truncated at 100 lines see the full file
Changelog for package reaction_analyzer
0.6.0 (2026-02-14)
- chore: match package versions
- feat(reaction_analyzer): move package from autoware_universe (#329) this package is moved from https://github.com/autowarefoundation/autoware_universe/pull/11807 ---------Co-authored-by: Berkay Karaman <<berkay@leodrive.ai>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>> Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: kobayu858 <<129580202+kobayu858@users.noreply.github.com>> Co-authored-by: SakodaShintaro <<shintaro.sakoda@tier4.jp>> Co-authored-by: Batuhan Beytekin <<71197983+batuhanbeytekin@users.noreply.github.com>> Co-authored-by: Yutaka Kondo <<yutaka.kondo@youtalk.jp>> Co-authored-by: Esteve Fernandez <<33620+esteve@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: 心刚 <<90366790+liuXinGangChina@users.noreply.github.com>> Co-authored-by: Hayato Mizushima <<hayato-m126@users.noreply.github.com>> Co-authored-by: Taiki Yamada <<129915538+TaikiYamada4@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Mete Fatih Cırıt <<mfc@autoware.org>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Takatoshi Kondo <<redboltz@gmail.com>> Co-authored-by: Shumpei Wakabayashi <<42209144+shmpwk@users.noreply.github.com>> Co-authored-by: Junya Sasaki <<junya.sasaki@tier4.jp>>
- Contributors: Ryohsuke Mitsudome, Takagi, Isamu
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
| libpcl-all-dev |
Dependant Packages
Launch files
- launch/reaction_analyzer.launch.xml
-
- reaction_analyzer_param_path [default: $(find-pkg-share reaction_analyzer)/param/reaction_analyzer.param.yaml]
- launch_simulator_perception_modules [default: false]
- laserscan_based_occupancy_grid_map_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/laserscan_based_occupancy_grid_map.param.yaml]
- occupancy_grid_map_updater [default: binary_bayes_filter]
- occupancy_grid_map_updater_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/$(var occupancy_grid_map_updater)_updater.param.yaml]
- running_mode [default: planning_control]
- map_path
- vehicle_model [default: sample_vehicle]
- sensor_model [default: sample_sensor_kit]
Messages
Services
Plugins
Recent questions tagged reaction_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Berkay Karaman
Authors
- Berkay Karaman
Reaction Analyzer
Description
The main purpose of the reaction analyzer package is to measure the reaction times of various nodes within a ROS-based
autonomous driving simulation environment by subscribing to pre-determined topics. This tool is particularly useful for
evaluating the performance of perception, planning, and control pipelines in response to dynamic changes in the
environment, such as sudden obstacles. To be able to measure both control outputs and perception outputs, it was
necessary to divide the node into two running_mode: planning_control and perception_planning.
Planning Control Mode
In this mode, the reaction analyzer creates a dummy publisher for the PredictedObjects and PointCloud2 topics. In the
beginning of the test, it publishes the initial position of the ego vehicle and the goal position to set the test
environment. Then, it spawns a sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to
search reacted messages of the planning and control nodes in the pre-determined topics. When all the topics are reacted,
it calculates the reaction time of the nodes and statistics by comparing reacted_times of each of the nodes
with spawn_cmd_time, and it creates a csv file to store the results.
Perception Planning Mode
In this mode, the reaction analyzer reads the rosbag files which are recorded from AWSIM, and it creates a topic
publisher for each topic inside the rosbag to replay the rosbag. It reads two rosbag files: path_bag_without_object
and path_bag_with_object. Firstly, it replays the path_bag_without_object to set the initial position of the ego
vehicle and the goal position. After spawn_time_after_init seconds , it replays the path_bag_with_object to spawn a
sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to search the reacted messages of
the perception and planning nodes in the pre-determined topics. When all the topics are reacted, it calculates the
reaction time of the nodes and statistics by comparing reacted_times of each of the nodes with spawn_cmd_time, and
it creates a csv file to store the results.
Point Cloud Publisher Type
To get better analyze for Perception & Sensing pipeline, the reaction analyzer can publish the point cloud messages in 3
different ways: async_header_sync_publish, sync_header_sync_publish or async_publish. (T is the period of the
lidar’s output)
-
async_header_sync_publish: It publishes the point cloud messages synchronously with asynchronous header times. It means that each of the lidar’s output will be published at the same time, but the headers of the point cloud messages includes different timestamps because of the phase difference. -
sync_header_sync_publish: It publishes the point cloud messages synchronously with synchronous header times. It means that each of the lidar’s output will be published at the same time, and the headers of the point cloud messages includes the same timestamps. -
async_publish: It publishes the point cloud messages asynchronously. It means that each of the lidar’s output will be published at different times.
Usage
The common parameters you need to define for both running modes are output_file_path, test_iteration,
and reaction_chain list. output_file_path is the output file path is the path where the results and statistics
will be stored. test_iteration defines how many tests will be performed. The reaction_chain list is the list of the
pre-defined topics you want to measure their reaction times.
IMPORTANT: Ensure the reaction_chain list is correctly defined:
- For
perception_planningmode, do not defineControlnodes. - For
planning_controlmode, do not definePerceptionnodes.
Prepared Test Environment
- Download the demonstration test map from the
link here. After
downloading,
extract the zip file and use its path as
[MAP_PATH]in the following commands.
Planning Control Mode
- You need to define only Planning and Control nodes in the
reaction_chainlist. With the default parameters, you can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=planning_control vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit map_path:=[MAP_PATH]
After the command, the simple_planning_simulator and the reaction_analyzer will be launched. It will automatically
start to test. After the test is completed, the results will be stored in the output_file_path you defined.
Perception Planning Mode
- Download the rosbag files from the Google Drive link <❌ link is no longer available.>.
- Extract the zip file and set the path of the
.db3files to parameterspath_bag_without_objectandpath_bag_with_object. - You can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=perception_planning vehicle_model:=sample_vehicle sensor_model:=awsim_labs_sensor_kit map_path:=[MAP_PATH]
- On the first run of the tool in perception_planning mode, initialization might take longer than expected. Please allow some time for the process to complete.
After the command, the e2e_simulator and the reaction_analyzer will be launched. It will automatically start
to test. After the test is completed, the results will be stored in the output_file_path you defined.
Prepared Test Environment
Scene without object:
File truncated at 100 lines see the full file
Changelog for package reaction_analyzer
0.6.0 (2026-02-14)
- chore: match package versions
- feat(reaction_analyzer): move package from autoware_universe (#329) this package is moved from https://github.com/autowarefoundation/autoware_universe/pull/11807 ---------Co-authored-by: Berkay Karaman <<berkay@leodrive.ai>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>> Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: kobayu858 <<129580202+kobayu858@users.noreply.github.com>> Co-authored-by: SakodaShintaro <<shintaro.sakoda@tier4.jp>> Co-authored-by: Batuhan Beytekin <<71197983+batuhanbeytekin@users.noreply.github.com>> Co-authored-by: Yutaka Kondo <<yutaka.kondo@youtalk.jp>> Co-authored-by: Esteve Fernandez <<33620+esteve@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: 心刚 <<90366790+liuXinGangChina@users.noreply.github.com>> Co-authored-by: Hayato Mizushima <<hayato-m126@users.noreply.github.com>> Co-authored-by: Taiki Yamada <<129915538+TaikiYamada4@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Mete Fatih Cırıt <<mfc@autoware.org>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Takatoshi Kondo <<redboltz@gmail.com>> Co-authored-by: Shumpei Wakabayashi <<42209144+shmpwk@users.noreply.github.com>> Co-authored-by: Junya Sasaki <<junya.sasaki@tier4.jp>>
- Contributors: Ryohsuke Mitsudome, Takagi, Isamu
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
| libpcl-all-dev |
Dependant Packages
Launch files
- launch/reaction_analyzer.launch.xml
-
- reaction_analyzer_param_path [default: $(find-pkg-share reaction_analyzer)/param/reaction_analyzer.param.yaml]
- launch_simulator_perception_modules [default: false]
- laserscan_based_occupancy_grid_map_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/laserscan_based_occupancy_grid_map.param.yaml]
- occupancy_grid_map_updater [default: binary_bayes_filter]
- occupancy_grid_map_updater_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/$(var occupancy_grid_map_updater)_updater.param.yaml]
- running_mode [default: planning_control]
- map_path
- vehicle_model [default: sample_vehicle]
- sensor_model [default: sample_sensor_kit]
Messages
Services
Plugins
Recent questions tagged reaction_analyzer at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Berkay Karaman
Authors
- Berkay Karaman
Reaction Analyzer
Description
The main purpose of the reaction analyzer package is to measure the reaction times of various nodes within a ROS-based
autonomous driving simulation environment by subscribing to pre-determined topics. This tool is particularly useful for
evaluating the performance of perception, planning, and control pipelines in response to dynamic changes in the
environment, such as sudden obstacles. To be able to measure both control outputs and perception outputs, it was
necessary to divide the node into two running_mode: planning_control and perception_planning.
Planning Control Mode
In this mode, the reaction analyzer creates a dummy publisher for the PredictedObjects and PointCloud2 topics. In the
beginning of the test, it publishes the initial position of the ego vehicle and the goal position to set the test
environment. Then, it spawns a sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to
search reacted messages of the planning and control nodes in the pre-determined topics. When all the topics are reacted,
it calculates the reaction time of the nodes and statistics by comparing reacted_times of each of the nodes
with spawn_cmd_time, and it creates a csv file to store the results.
Perception Planning Mode
In this mode, the reaction analyzer reads the rosbag files which are recorded from AWSIM, and it creates a topic
publisher for each topic inside the rosbag to replay the rosbag. It reads two rosbag files: path_bag_without_object
and path_bag_with_object. Firstly, it replays the path_bag_without_object to set the initial position of the ego
vehicle and the goal position. After spawn_time_after_init seconds , it replays the path_bag_with_object to spawn a
sudden obstacle in front of the ego vehicle. After the obstacle is spawned, it starts to search the reacted messages of
the perception and planning nodes in the pre-determined topics. When all the topics are reacted, it calculates the
reaction time of the nodes and statistics by comparing reacted_times of each of the nodes with spawn_cmd_time, and
it creates a csv file to store the results.
Point Cloud Publisher Type
To get better analyze for Perception & Sensing pipeline, the reaction analyzer can publish the point cloud messages in 3
different ways: async_header_sync_publish, sync_header_sync_publish or async_publish. (T is the period of the
lidar’s output)
-
async_header_sync_publish: It publishes the point cloud messages synchronously with asynchronous header times. It means that each of the lidar’s output will be published at the same time, but the headers of the point cloud messages includes different timestamps because of the phase difference. -
sync_header_sync_publish: It publishes the point cloud messages synchronously with synchronous header times. It means that each of the lidar’s output will be published at the same time, and the headers of the point cloud messages includes the same timestamps. -
async_publish: It publishes the point cloud messages asynchronously. It means that each of the lidar’s output will be published at different times.
Usage
The common parameters you need to define for both running modes are output_file_path, test_iteration,
and reaction_chain list. output_file_path is the output file path is the path where the results and statistics
will be stored. test_iteration defines how many tests will be performed. The reaction_chain list is the list of the
pre-defined topics you want to measure their reaction times.
IMPORTANT: Ensure the reaction_chain list is correctly defined:
- For
perception_planningmode, do not defineControlnodes. - For
planning_controlmode, do not definePerceptionnodes.
Prepared Test Environment
- Download the demonstration test map from the
link here. After
downloading,
extract the zip file and use its path as
[MAP_PATH]in the following commands.
Planning Control Mode
- You need to define only Planning and Control nodes in the
reaction_chainlist. With the default parameters, you can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=planning_control vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit map_path:=[MAP_PATH]
After the command, the simple_planning_simulator and the reaction_analyzer will be launched. It will automatically
start to test. After the test is completed, the results will be stored in the output_file_path you defined.
Perception Planning Mode
- Download the rosbag files from the Google Drive link <❌ link is no longer available.>.
- Extract the zip file and set the path of the
.db3files to parameterspath_bag_without_objectandpath_bag_with_object. - You can start to test with the following command:
ros2 launch reaction_analyzer reaction_analyzer.launch.xml running_mode:=perception_planning vehicle_model:=sample_vehicle sensor_model:=awsim_labs_sensor_kit map_path:=[MAP_PATH]
- On the first run of the tool in perception_planning mode, initialization might take longer than expected. Please allow some time for the process to complete.
After the command, the e2e_simulator and the reaction_analyzer will be launched. It will automatically start
to test. After the test is completed, the results will be stored in the output_file_path you defined.
Prepared Test Environment
Scene without object:
File truncated at 100 lines see the full file
Changelog for package reaction_analyzer
0.6.0 (2026-02-14)
- chore: match package versions
- feat(reaction_analyzer): move package from autoware_universe (#329) this package is moved from https://github.com/autowarefoundation/autoware_universe/pull/11807 ---------Co-authored-by: Berkay Karaman <<berkay@leodrive.ai>> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: Cynthia Liu <<cynthia.liu@autocore.ai>> Co-authored-by: NorahXiong <<norah.xiong@autocore.ai>> Co-authored-by: beginningfan <<beginning.fan@autocore.ai>> Co-authored-by: Takayuki Murooka <<takayuki5168@gmail.com>> Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: kobayu858 <<129580202+kobayu858@users.noreply.github.com>> Co-authored-by: SakodaShintaro <<shintaro.sakoda@tier4.jp>> Co-authored-by: Batuhan Beytekin <<71197983+batuhanbeytekin@users.noreply.github.com>> Co-authored-by: Yutaka Kondo <<yutaka.kondo@youtalk.jp>> Co-authored-by: Esteve Fernandez <<33620+esteve@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: Fumiya Watanabe <<rej55.g@gmail.com>> Co-authored-by: 心刚 <<90366790+liuXinGangChina@users.noreply.github.com>> Co-authored-by: Hayato Mizushima <<hayato-m126@users.noreply.github.com>> Co-authored-by: Taiki Yamada <<129915538+TaikiYamada4@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Mete Fatih Cırıt <<mfc@autoware.org>> Co-authored-by: Yukihiro Saito <<yukky.saito@gmail.com>> Co-authored-by: Takatoshi Kondo <<redboltz@gmail.com>> Co-authored-by: Shumpei Wakabayashi <<42209144+shmpwk@users.noreply.github.com>> Co-authored-by: Junya Sasaki <<junya.sasaki@tier4.jp>>
- Contributors: Ryohsuke Mitsudome, Takagi, Isamu
Package Dependencies
System Dependencies
| Name |
|---|
| eigen |
| libpcl-all-dev |
Dependant Packages
Launch files
- launch/reaction_analyzer.launch.xml
-
- reaction_analyzer_param_path [default: $(find-pkg-share reaction_analyzer)/param/reaction_analyzer.param.yaml]
- launch_simulator_perception_modules [default: false]
- laserscan_based_occupancy_grid_map_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/laserscan_based_occupancy_grid_map.param.yaml]
- occupancy_grid_map_updater [default: binary_bayes_filter]
- occupancy_grid_map_updater_param_path [default: $(find-pkg-share autoware_launch)/config/perception/occupancy_grid_map/$(var occupancy_grid_map_updater)_updater.param.yaml]
- running_mode [default: planning_control]
- map_path
- vehicle_model [default: sample_vehicle]
- sensor_model [default: sample_sensor_kit]