
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Akiro Harada
Authors
tier4_control_rviz_plugin
This package is to mimic external control for simulation.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/control/current_gate_mode |
tier4_control_msgs::msg::GateMode |
Current GATE mode |
/vehicle/status/velocity_status |
autoware_vehicle_msgs::msg::VelocityReport |
Current velocity status |
/api/autoware/get/engage |
tier4_external_api_msgs::srv::Engage |
Getting Engage |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The state of GEAR |
Output
| Name | Type | Description |
|---|---|---|
/control/gate_mode_cmd |
tier4_control_msgs::msg::GateMode |
GATE mode |
/external/selected/control_cmd |
autoware_control_msgs::msg::ControlCommand |
Control command |
/external/selected/gear_cmd |
autoware_vehicle_msgs::msg::GearCommand |
GEAR |
Usage
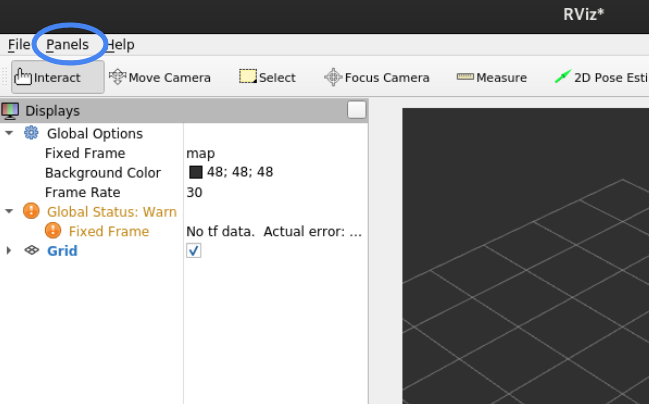
-
Start rviz and select Panels.
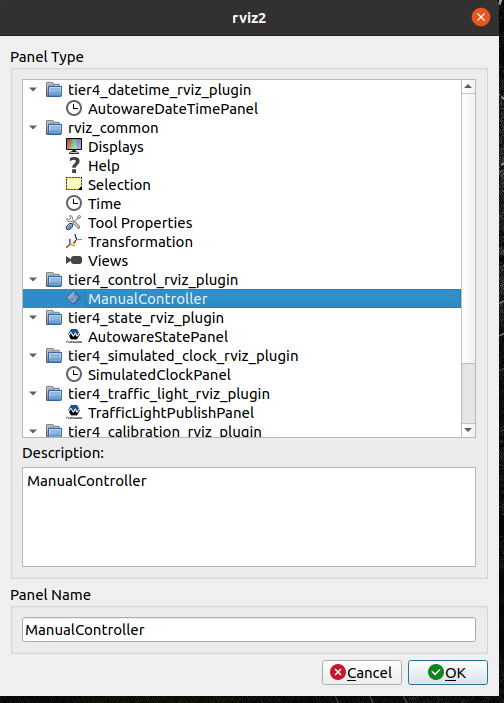
-
Select tier4_control_rviz_plugin/ManualController and press OK.
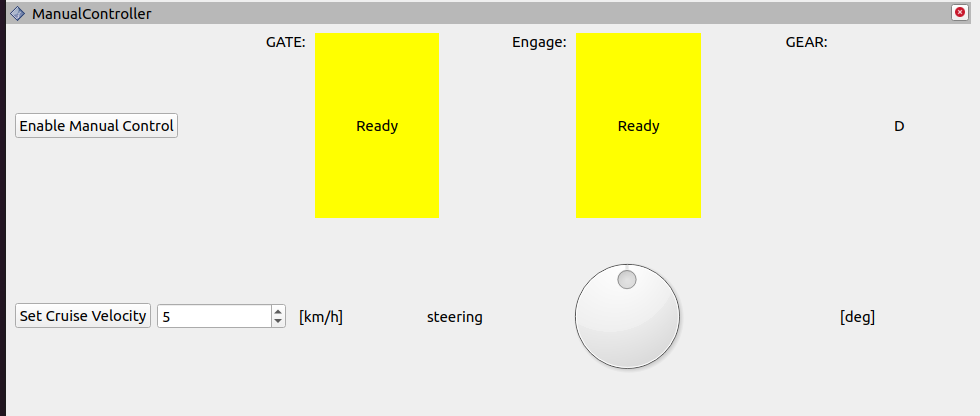
-
Enter velocity in “Set Cruise Velocity” and Press the button to confirm. You can notice that GEAR shows D (DRIVE).

-
Press “Enable Manual Control” and you can notice that “GATE” and “Engage” turn “Ready” and the vehicle starts!
Changelog for package tier4_control_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
add time to gear cmd (#128)
-
feat(tier4_control_rviz_plugin): change to read topic by polling and add missing subscriber (#51)
- add vscode files to gitignore
- replace rclcpp::Subscription to tier4_autoware_utils::InterProcessPollingSubscriber
- add Akiro Harada as a maintainer in tier4_control_rviz_plugin/package.xml
- style(pre-commit): autofix
- replace tier4_autoware_utils to autoware_universe_utils
* fix namespace ---------Co-authored-by: Autumn60 <<akiro.harada@tier4.jp>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat!: change from autoware_auto_msgs to autoware_msgs (#30)
- feat!: replace autoware_auto_msgs with autoware_msgs
- style(pre-commit): autofix
- feat: port remaining autoware_auto_msgs to autoware_msgs (#32)
- feat: port remaining autoware_auto_msgs to autoware_msgs
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- remove <depend>autoware_msgs</depend>
* remove non-existent dep ---------Co-authored-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<mfc@leodrive.ai>>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_control_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Akiro Harada
Authors
tier4_control_rviz_plugin
This package is to mimic external control for simulation.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/control/current_gate_mode |
tier4_control_msgs::msg::GateMode |
Current GATE mode |
/vehicle/status/velocity_status |
autoware_vehicle_msgs::msg::VelocityReport |
Current velocity status |
/api/autoware/get/engage |
tier4_external_api_msgs::srv::Engage |
Getting Engage |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The state of GEAR |
Output
| Name | Type | Description |
|---|---|---|
/control/gate_mode_cmd |
tier4_control_msgs::msg::GateMode |
GATE mode |
/external/selected/control_cmd |
autoware_control_msgs::msg::ControlCommand |
Control command |
/external/selected/gear_cmd |
autoware_vehicle_msgs::msg::GearCommand |
GEAR |
Usage
-
Start rviz and select Panels.
-
Select tier4_control_rviz_plugin/ManualController and press OK.
-
Enter velocity in “Set Cruise Velocity” and Press the button to confirm. You can notice that GEAR shows D (DRIVE).
-
Press “Enable Manual Control” and you can notice that “GATE” and “Engage” turn “Ready” and the vehicle starts!
Changelog for package tier4_control_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
add time to gear cmd (#128)
-
feat(tier4_control_rviz_plugin): change to read topic by polling and add missing subscriber (#51)
- add vscode files to gitignore
- replace rclcpp::Subscription to tier4_autoware_utils::InterProcessPollingSubscriber
- add Akiro Harada as a maintainer in tier4_control_rviz_plugin/package.xml
- style(pre-commit): autofix
- replace tier4_autoware_utils to autoware_universe_utils
* fix namespace ---------Co-authored-by: Autumn60 <<akiro.harada@tier4.jp>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat!: change from autoware_auto_msgs to autoware_msgs (#30)
- feat!: replace autoware_auto_msgs with autoware_msgs
- style(pre-commit): autofix
- feat: port remaining autoware_auto_msgs to autoware_msgs (#32)
- feat: port remaining autoware_auto_msgs to autoware_msgs
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- remove <depend>autoware_msgs</depend>
* remove non-existent dep ---------Co-authored-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<mfc@leodrive.ai>>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_control_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Akiro Harada
Authors
tier4_control_rviz_plugin
This package is to mimic external control for simulation.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/control/current_gate_mode |
tier4_control_msgs::msg::GateMode |
Current GATE mode |
/vehicle/status/velocity_status |
autoware_vehicle_msgs::msg::VelocityReport |
Current velocity status |
/api/autoware/get/engage |
tier4_external_api_msgs::srv::Engage |
Getting Engage |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The state of GEAR |
Output
| Name | Type | Description |
|---|---|---|
/control/gate_mode_cmd |
tier4_control_msgs::msg::GateMode |
GATE mode |
/external/selected/control_cmd |
autoware_control_msgs::msg::ControlCommand |
Control command |
/external/selected/gear_cmd |
autoware_vehicle_msgs::msg::GearCommand |
GEAR |
Usage
-
Start rviz and select Panels.
-
Select tier4_control_rviz_plugin/ManualController and press OK.
-
Enter velocity in “Set Cruise Velocity” and Press the button to confirm. You can notice that GEAR shows D (DRIVE).
-
Press “Enable Manual Control” and you can notice that “GATE” and “Engage” turn “Ready” and the vehicle starts!
Changelog for package tier4_control_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
add time to gear cmd (#128)
-
feat(tier4_control_rviz_plugin): change to read topic by polling and add missing subscriber (#51)
- add vscode files to gitignore
- replace rclcpp::Subscription to tier4_autoware_utils::InterProcessPollingSubscriber
- add Akiro Harada as a maintainer in tier4_control_rviz_plugin/package.xml
- style(pre-commit): autofix
- replace tier4_autoware_utils to autoware_universe_utils
* fix namespace ---------Co-authored-by: Autumn60 <<akiro.harada@tier4.jp>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat!: change from autoware_auto_msgs to autoware_msgs (#30)
- feat!: replace autoware_auto_msgs with autoware_msgs
- style(pre-commit): autofix
- feat: port remaining autoware_auto_msgs to autoware_msgs (#32)
- feat: port remaining autoware_auto_msgs to autoware_msgs
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- remove <depend>autoware_msgs</depend>
* remove non-existent dep ---------Co-authored-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<mfc@leodrive.ai>>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_control_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Akiro Harada
Authors
tier4_control_rviz_plugin
This package is to mimic external control for simulation.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/control/current_gate_mode |
tier4_control_msgs::msg::GateMode |
Current GATE mode |
/vehicle/status/velocity_status |
autoware_vehicle_msgs::msg::VelocityReport |
Current velocity status |
/api/autoware/get/engage |
tier4_external_api_msgs::srv::Engage |
Getting Engage |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The state of GEAR |
Output
| Name | Type | Description |
|---|---|---|
/control/gate_mode_cmd |
tier4_control_msgs::msg::GateMode |
GATE mode |
/external/selected/control_cmd |
autoware_control_msgs::msg::ControlCommand |
Control command |
/external/selected/gear_cmd |
autoware_vehicle_msgs::msg::GearCommand |
GEAR |
Usage
-
Start rviz and select Panels.
-
Select tier4_control_rviz_plugin/ManualController and press OK.
-
Enter velocity in “Set Cruise Velocity” and Press the button to confirm. You can notice that GEAR shows D (DRIVE).
-
Press “Enable Manual Control” and you can notice that “GATE” and “Engage” turn “Ready” and the vehicle starts!
Changelog for package tier4_control_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
add time to gear cmd (#128)
-
feat(tier4_control_rviz_plugin): change to read topic by polling and add missing subscriber (#51)
- add vscode files to gitignore
- replace rclcpp::Subscription to tier4_autoware_utils::InterProcessPollingSubscriber
- add Akiro Harada as a maintainer in tier4_control_rviz_plugin/package.xml
- style(pre-commit): autofix
- replace tier4_autoware_utils to autoware_universe_utils
* fix namespace ---------Co-authored-by: Autumn60 <<akiro.harada@tier4.jp>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat!: change from autoware_auto_msgs to autoware_msgs (#30)
- feat!: replace autoware_auto_msgs with autoware_msgs
- style(pre-commit): autofix
- feat: port remaining autoware_auto_msgs to autoware_msgs (#32)
- feat: port remaining autoware_auto_msgs to autoware_msgs
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- remove <depend>autoware_msgs</depend>
* remove non-existent dep ---------Co-authored-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<mfc@leodrive.ai>>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_control_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Akiro Harada
Authors
tier4_control_rviz_plugin
This package is to mimic external control for simulation.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/control/current_gate_mode |
tier4_control_msgs::msg::GateMode |
Current GATE mode |
/vehicle/status/velocity_status |
autoware_vehicle_msgs::msg::VelocityReport |
Current velocity status |
/api/autoware/get/engage |
tier4_external_api_msgs::srv::Engage |
Getting Engage |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The state of GEAR |
Output
| Name | Type | Description |
|---|---|---|
/control/gate_mode_cmd |
tier4_control_msgs::msg::GateMode |
GATE mode |
/external/selected/control_cmd |
autoware_control_msgs::msg::ControlCommand |
Control command |
/external/selected/gear_cmd |
autoware_vehicle_msgs::msg::GearCommand |
GEAR |
Usage
-
Start rviz and select Panels.
-
Select tier4_control_rviz_plugin/ManualController and press OK.
-
Enter velocity in “Set Cruise Velocity” and Press the button to confirm. You can notice that GEAR shows D (DRIVE).
-
Press “Enable Manual Control” and you can notice that “GATE” and “Engage” turn “Ready” and the vehicle starts!
Changelog for package tier4_control_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
add time to gear cmd (#128)
-
feat(tier4_control_rviz_plugin): change to read topic by polling and add missing subscriber (#51)
- add vscode files to gitignore
- replace rclcpp::Subscription to tier4_autoware_utils::InterProcessPollingSubscriber
- add Akiro Harada as a maintainer in tier4_control_rviz_plugin/package.xml
- style(pre-commit): autofix
- replace tier4_autoware_utils to autoware_universe_utils
* fix namespace ---------Co-authored-by: Autumn60 <<akiro.harada@tier4.jp>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat!: change from autoware_auto_msgs to autoware_msgs (#30)
- feat!: replace autoware_auto_msgs with autoware_msgs
- style(pre-commit): autofix
- feat: port remaining autoware_auto_msgs to autoware_msgs (#32)
- feat: port remaining autoware_auto_msgs to autoware_msgs
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- remove <depend>autoware_msgs</depend>
* remove non-existent dep ---------Co-authored-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<mfc@leodrive.ai>>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_control_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Akiro Harada
Authors
tier4_control_rviz_plugin
This package is to mimic external control for simulation.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/control/current_gate_mode |
tier4_control_msgs::msg::GateMode |
Current GATE mode |
/vehicle/status/velocity_status |
autoware_vehicle_msgs::msg::VelocityReport |
Current velocity status |
/api/autoware/get/engage |
tier4_external_api_msgs::srv::Engage |
Getting Engage |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The state of GEAR |
Output
| Name | Type | Description |
|---|---|---|
/control/gate_mode_cmd |
tier4_control_msgs::msg::GateMode |
GATE mode |
/external/selected/control_cmd |
autoware_control_msgs::msg::ControlCommand |
Control command |
/external/selected/gear_cmd |
autoware_vehicle_msgs::msg::GearCommand |
GEAR |
Usage
-
Start rviz and select Panels.
-
Select tier4_control_rviz_plugin/ManualController and press OK.
-
Enter velocity in “Set Cruise Velocity” and Press the button to confirm. You can notice that GEAR shows D (DRIVE).
-
Press “Enable Manual Control” and you can notice that “GATE” and “Engage” turn “Ready” and the vehicle starts!
Changelog for package tier4_control_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
add time to gear cmd (#128)
-
feat(tier4_control_rviz_plugin): change to read topic by polling and add missing subscriber (#51)
- add vscode files to gitignore
- replace rclcpp::Subscription to tier4_autoware_utils::InterProcessPollingSubscriber
- add Akiro Harada as a maintainer in tier4_control_rviz_plugin/package.xml
- style(pre-commit): autofix
- replace tier4_autoware_utils to autoware_universe_utils
* fix namespace ---------Co-authored-by: Autumn60 <<akiro.harada@tier4.jp>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat!: change from autoware_auto_msgs to autoware_msgs (#30)
- feat!: replace autoware_auto_msgs with autoware_msgs
- style(pre-commit): autofix
- feat: port remaining autoware_auto_msgs to autoware_msgs (#32)
- feat: port remaining autoware_auto_msgs to autoware_msgs
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- remove <depend>autoware_msgs</depend>
* remove non-existent dep ---------Co-authored-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<mfc@leodrive.ai>>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_control_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Akiro Harada
Authors
tier4_control_rviz_plugin
This package is to mimic external control for simulation.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/control/current_gate_mode |
tier4_control_msgs::msg::GateMode |
Current GATE mode |
/vehicle/status/velocity_status |
autoware_vehicle_msgs::msg::VelocityReport |
Current velocity status |
/api/autoware/get/engage |
tier4_external_api_msgs::srv::Engage |
Getting Engage |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The state of GEAR |
Output
| Name | Type | Description |
|---|---|---|
/control/gate_mode_cmd |
tier4_control_msgs::msg::GateMode |
GATE mode |
/external/selected/control_cmd |
autoware_control_msgs::msg::ControlCommand |
Control command |
/external/selected/gear_cmd |
autoware_vehicle_msgs::msg::GearCommand |
GEAR |
Usage
-
Start rviz and select Panels.
-
Select tier4_control_rviz_plugin/ManualController and press OK.
-
Enter velocity in “Set Cruise Velocity” and Press the button to confirm. You can notice that GEAR shows D (DRIVE).
-
Press “Enable Manual Control” and you can notice that “GATE” and “Engage” turn “Ready” and the vehicle starts!
Changelog for package tier4_control_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
add time to gear cmd (#128)
-
feat(tier4_control_rviz_plugin): change to read topic by polling and add missing subscriber (#51)
- add vscode files to gitignore
- replace rclcpp::Subscription to tier4_autoware_utils::InterProcessPollingSubscriber
- add Akiro Harada as a maintainer in tier4_control_rviz_plugin/package.xml
- style(pre-commit): autofix
- replace tier4_autoware_utils to autoware_universe_utils
* fix namespace ---------Co-authored-by: Autumn60 <<akiro.harada@tier4.jp>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat!: change from autoware_auto_msgs to autoware_msgs (#30)
- feat!: replace autoware_auto_msgs with autoware_msgs
- style(pre-commit): autofix
- feat: port remaining autoware_auto_msgs to autoware_msgs (#32)
- feat: port remaining autoware_auto_msgs to autoware_msgs
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- remove <depend>autoware_msgs</depend>
* remove non-existent dep ---------Co-authored-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<mfc@leodrive.ai>>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_control_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Akiro Harada
Authors
tier4_control_rviz_plugin
This package is to mimic external control for simulation.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/control/current_gate_mode |
tier4_control_msgs::msg::GateMode |
Current GATE mode |
/vehicle/status/velocity_status |
autoware_vehicle_msgs::msg::VelocityReport |
Current velocity status |
/api/autoware/get/engage |
tier4_external_api_msgs::srv::Engage |
Getting Engage |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The state of GEAR |
Output
| Name | Type | Description |
|---|---|---|
/control/gate_mode_cmd |
tier4_control_msgs::msg::GateMode |
GATE mode |
/external/selected/control_cmd |
autoware_control_msgs::msg::ControlCommand |
Control command |
/external/selected/gear_cmd |
autoware_vehicle_msgs::msg::GearCommand |
GEAR |
Usage
-
Start rviz and select Panels.
-
Select tier4_control_rviz_plugin/ManualController and press OK.
-
Enter velocity in “Set Cruise Velocity” and Press the button to confirm. You can notice that GEAR shows D (DRIVE).
-
Press “Enable Manual Control” and you can notice that “GATE” and “Engage” turn “Ready” and the vehicle starts!
Changelog for package tier4_control_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
add time to gear cmd (#128)
-
feat(tier4_control_rviz_plugin): change to read topic by polling and add missing subscriber (#51)
- add vscode files to gitignore
- replace rclcpp::Subscription to tier4_autoware_utils::InterProcessPollingSubscriber
- add Akiro Harada as a maintainer in tier4_control_rviz_plugin/package.xml
- style(pre-commit): autofix
- replace tier4_autoware_utils to autoware_universe_utils
* fix namespace ---------Co-authored-by: Autumn60 <<akiro.harada@tier4.jp>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat!: change from autoware_auto_msgs to autoware_msgs (#30)
- feat!: replace autoware_auto_msgs with autoware_msgs
- style(pre-commit): autofix
- feat: port remaining autoware_auto_msgs to autoware_msgs (#32)
- feat: port remaining autoware_auto_msgs to autoware_msgs
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- remove <depend>autoware_msgs</depend>
* remove non-existent dep ---------Co-authored-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<mfc@leodrive.ai>>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_control_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.6.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_tools.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-02 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Akiro Harada
Authors
tier4_control_rviz_plugin
This package is to mimic external control for simulation.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/control/current_gate_mode |
tier4_control_msgs::msg::GateMode |
Current GATE mode |
/vehicle/status/velocity_status |
autoware_vehicle_msgs::msg::VelocityReport |
Current velocity status |
/api/autoware/get/engage |
tier4_external_api_msgs::srv::Engage |
Getting Engage |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The state of GEAR |
Output
| Name | Type | Description |
|---|---|---|
/control/gate_mode_cmd |
tier4_control_msgs::msg::GateMode |
GATE mode |
/external/selected/control_cmd |
autoware_control_msgs::msg::ControlCommand |
Control command |
/external/selected/gear_cmd |
autoware_vehicle_msgs::msg::GearCommand |
GEAR |
Usage
-
Start rviz and select Panels.
-
Select tier4_control_rviz_plugin/ManualController and press OK.
-
Enter velocity in “Set Cruise Velocity” and Press the button to confirm. You can notice that GEAR shows D (DRIVE).
-
Press “Enable Manual Control” and you can notice that “GATE” and “Engage” turn “Ready” and the vehicle starts!
Changelog for package tier4_control_rviz_plugin
0.6.0 (2026-02-14)
0.5.0 (2025-12-30)
0.4.0 (2025-11-16)
0.3.0 (2025-08-11)
0.2.0 (2025-03-24)
0.1.0 (2025-01-28)
-
unify version to 0.0.0
-
add time to gear cmd (#128)
-
feat(tier4_control_rviz_plugin): change to read topic by polling and add missing subscriber (#51)
- add vscode files to gitignore
- replace rclcpp::Subscription to tier4_autoware_utils::InterProcessPollingSubscriber
- add Akiro Harada as a maintainer in tier4_control_rviz_plugin/package.xml
- style(pre-commit): autofix
- replace tier4_autoware_utils to autoware_universe_utils
* fix namespace ---------Co-authored-by: Autumn60 <<akiro.harada@tier4.jp>> Co-authored-by: M. Fatih Cırıt <<xmfcx@users.noreply.github.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
refactor(autoware_universe_utils)!: rename tier4_autoware_utils to autoware_universe_utils (#52) Co-authored-by: kosuke55 <<kosuke.tnp@gmail.com>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
-
feat!: change from autoware_auto_msgs to autoware_msgs (#30)
- feat!: replace autoware_auto_msgs with autoware_msgs
- style(pre-commit): autofix
- feat: port remaining autoware_auto_msgs to autoware_msgs (#32)
- feat: port remaining autoware_auto_msgs to autoware_msgs
* style(pre-commit): autofix ---------Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com>
- remove <depend>autoware_msgs</depend>
* remove non-existent dep ---------Co-authored-by: mitsudome-r <<ryohsuke.mitsudome@tier4.jp>> Co-authored-by: pre-commit-ci[bot] <66853113+pre-commit-ci[bot]@users.noreply.github.com> Co-authored-by: Ryohsuke Mitsudome <<43976834+mitsudome-r@users.noreply.github.com>> Co-authored-by: M. Fatih Cırıt <<mfc@leodrive.ai>>
-
chore(rviz_plugin): move peripheral rviz plugin (#27)
- feat: calibrator tier4 pkg name (#200)
- feat: change names
- feat: move pkg to common
- feat: change pkg name
* fix: library path (#225) Co-authored-by: taikitanaka3 <<taiki.tanaka@tier4.jp>>
- feat: add rviz plugin to publish and control the simulated clock (#349)
- Add tier4_clock_rviz_plugin to publish&control the sim clock in rviz
- Add step control
- Fix precommit
- Update documentation
- Fix spellcheck
- Update plugin description and icon
- Rename package
- Fix bug with long duration jumps (high speed + low rate)
- ci: check include guard (#438)
- ci: check include guard
- apply pre-commit
* Update .pre-commit-config.yaml Co-authored-by: Kenji Miyake <<31987104+kenji-miyake@users.noreply.github.com>>
* fix: pre-commit Co-authored-by: Kenji Miyake
File truncated at 100 lines see the full file