
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Kyoichi Sugahara
- Dai Nguyen
- Kenzo Lobos-Tsunekawa
- Yihsiang Fang
- Yoshi Ri
- David Wong
- Melike Tanrikulu
- Max Schmeller
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_pointcloud_preprocessor
Purpose
The autoware_pointcloud_preprocessor is a package that includes the following filters:
- removing outlier points
- cropping
- concatenating pointclouds
- correcting distortion
- downsampling
- densifying pointclouds
Inner-workings / Algorithms
Detail description of each filter’s algorithm is in the following links.
| Filter Name | Description | Detail |
|---|---|---|
| concatenate_data | subscribe multiple pointclouds and concatenate them into a pointcloud | link |
| crop_box_filter | remove points within a given box | link |
| distortion_corrector | compensate pointcloud distortion caused by ego vehicle’s movement during 1 scan | link |
| downsample_filter | downsampling input pointcloud | link |
| outlier_filter | remove points caused by hardware problems, rain drops and small insects as a noise | link |
| passthrough_filter | remove points on the outside of a range in given field (e.g. x, y, z, intensity) | link |
| pointcloud_accumulator | accumulate pointclouds for a given amount of time | link |
| pointcloud_densifier | enhance sparse point clouds by using information from previous frames | link |
| vector_map_filter | remove points on the outside of lane by using vector map | link |
| vector_map_inside_area_filter | remove points inside of vector map area that has given type by parameter | link |
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/indices |
pcl_msgs::msg::Indices |
reference indices |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
input_frame |
string | ” “ | input frame id |
output_frame |
string | ” “ | output frame id |
max_queue_size |
int | 5 | max queue size of input/output topics |
use_indices |
bool | false | flag to use pointcloud indices |
latched_indices |
bool | false | flag to latch pointcloud indices |
approximate_sync |
bool | false | flag to use approximate sync option |
Assumptions / Known limits
autoware::pointcloud_preprocessor::Filter is implemented based on pcl_perception [1] because
of this issue.
Measuring the performance
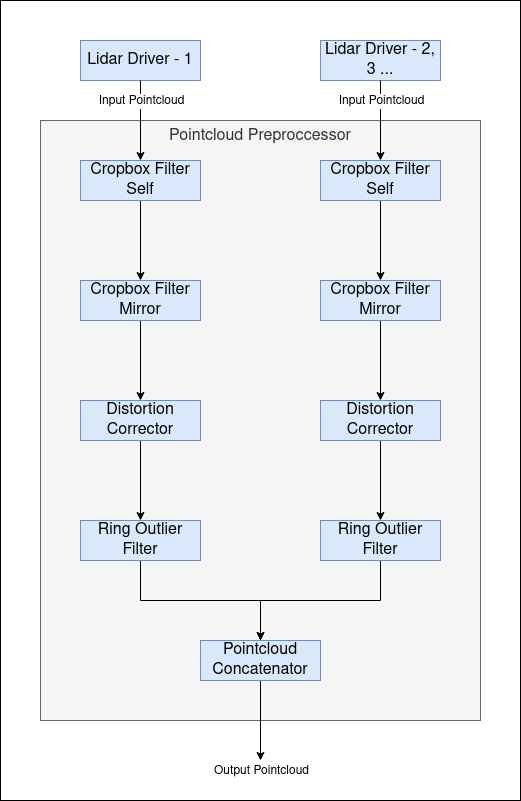
In Autoware, point cloud data from each LiDAR sensor undergoes preprocessing in the sensing pipeline before being input into the perception pipeline. The preprocessing stages are illustrated in the diagram below:
Each stage in the pipeline incurs a processing delay. Mostly, we’ve used ros2 topic delay /topic_name to measure
the time between the message header and the current time. This approach works well for small-sized messages. However,
when dealing with large point cloud messages, this method introduces an additional delay. This is primarily because
accessing these large point cloud messages externally impacts the pipeline’s performance.
Our sensing/perception nodes are designed to run within composable node containers, leveraging intra-process communication. External subscriptions to these messages (like using ros2 topic delay or rviz2) impose extra delays and can even slow down the pipeline by subscribing externally. Therefore, these measurements will not be accurate.
To mitigate this issue, we’ve adopted a method where each node in the pipeline reports its pipeline latency time. This approach ensures the integrity of intra-process communication and provides a more accurate measure of delays in the pipeline.
Benchmarking The Pipeline
The nodes within the pipeline report the pipeline latency time, indicating the duration from the sensor driver’s pointcloud output to the node’s output. This data is crucial for assessing the pipeline’s health and efficiency.
When running Autoware, you can monitor the pipeline latency times for each node in the pipeline by subscribing to the following ROS 2 topics:
/sensing/lidar/LidarX/crop_box_filter_self/debug/pipeline_latency_ms/sensing/lidar/LidarX/crop_box_filter_mirror/debug/pipeline_latency_ms/sensing/lidar/LidarX/distortion_corrector/debug/pipeline_latency_ms/sensing/lidar/LidarX/ring_outlier_filter/debug/pipeline_latency_ms/sensing/lidar/concatenate_data_synchronizer/debug/sensing/lidar/LidarX/pointcloud/pipeline_latency_ms
These topics provide the pipeline latency times, giving insights into the delays at various stages of the pipeline from the sensor output of LidarX to each subsequent node.
File truncated at 100 lines see the full file
Changelog for package autoware_pointcloud_preprocessor
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
test(blockage_diag): add unit tests to classes for blockage and dust detection (#12029)
- test(blockage_diag): add unit tests for blockage detection functionality
- test(blockage_diag): add unit tests for dust detection functionality
- test(blockage_diag): add unit tests for multi-frame detection aggregator
- test(blockage_diag): reduce integration tests and simplify pointcloud creation
* test(blockage_diag): optimize parameters and remove unnecessary threading in integration tests ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
feat!: remove ROS 2 Galactic codes (#11905)
-
refactor(blockage_diag_node): separate dust detection and multi frame aggregator from blockage diag (#12024)
- refactor(blockage_diag): separate dust detection logic into its own files
- refactor(blockage_diag): separate multi-frame detection aggregator into its own files
* refactor(blockage_diag_node): remove unused includes to clean up code ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
refactor(blockage_diag_node): extract blockage detection logic from blockage diag node (#12012)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
- style(pre-commit): autofix
- refactor(blockage_diag): add missing include directives for string and utility for cpp-lint check
- refactor(blockage_diag): extract dust detection logic into BlockageDetector class
- refactor(blockage_diag): remove unused member variables
- refactor(blockage_diag): reorder class definitions for better readability
- refactor(blockage_diag): remove unused functions definitions from header
- refactor(blockage_diag): simplify no return mask creation by removing quantization step
- refactor(blockage_diag): update diagnostics to return structured results for blockage and dust detection
- refactor(blockage_diag): update dust debug info method to use DustDetectionResult
- refactor(blockage_diag): update publish_blockage_debug_info to include blockage detection result
- refactor(blockage_diag): update debug info methods to use structured parameters
- refactor(blockage_diag): extract blockage detection logic into separate files
- refactor(blockage_diag): unify mask functions
- refactor(blockage_diag): apply clang
- refactor(blockage_diag): restore quantize_8u function to reduce diff in PR
- refactor(blockage_diag): reorder implementation to reduce diff
- fix(blockage_diag): restore lidar_depth_map publish
* style(pre-commit): autofix ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>> Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(polar_voxel_outlier_filter): delete force_update() (#12006)
-
refactor(blockage_diag_node): extract dust detection logic from blockage diag node (#11997)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/approximate_downsample_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/approximate_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- approximate_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/approximate_downsample_filter_node.param.yaml]
- launch/blockage_diag_node.launch.xml
-
- input_topic_name [default: pointcloud_raw_ex]
- output_topic_name [default: blockage_diag/pointcloud]
- blockage_diagnostics_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/blockage_diag_node.param.yaml]
- launch/concatenate_and_time_sync_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_and_time_sync_node.param.yaml]
- launch/concatenate_pointcloud.launch.xml
-
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_pointclouds.param.yaml]
- launch/crop_box_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/self_cropped/pointcloud_ex]
- input_frame [default: base_link]
- output_frame [default: base_link]
- crop_box_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/crop_box_filter_node.param.yaml]
- launch/distortion_corrector_node.launch.xml
-
- input/pointcloud [default: /sensing/lidar/top/mirror_cropped/pointcloud_ex]
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input/imu [default: /sensing/imu/imu_data]
- output/pointcloud [default: /sensing/lidar/top/rectified/pointcloud_ex]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/distortion_corrector_node.param.yaml]
- launch/dual_return_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- dual_return_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/dual_return_outlier_filter_node.param.yaml]
- launch/lanelet2_map_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: detection_area/pointcloud]
- output_pointcloud [default: vector_map_filtered/pointcloud]
- lanelet2_map_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/lanelet2_map_filter_node.param.yaml]
- launch/pickup_based_voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/pickup_based_voxel_grid_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- pickup_based_voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pickup_based_voxel_grid_downsample_filter_node.param.yaml]
- launch/pointcloud_accumulator_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud]
- output_topic_name [default: /sensing/lidar/top/pointcloud_accumulated]
- input_frame [default: base_link]
- output_frame [default: base_link]
- pointcloud_accumulator_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pointcloud_accumulator_node.param.yaml]
- launch/polar_voxel_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- polar_voxel_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/polar_voxel_outlier_filter_node.param.yaml]
- launch/preprocessor.launch.xml
-
- input_points_raw_list [default: ['/points_raw']]
- output_points_raw [default: /points_raw/cropbox/filtered]
- tf_output_frame [default: base_link]
- launch/radius_search_2d_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_filtered]
- input_frame [default: base_link]
- output_frame [default: base_link]
- radius_search_2d_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/radius_search_2d_outlier_filter_node.param.yaml]
- launch/random_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/random_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- random_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/random_downsample_filter_node.param.yaml]
- launch/ring_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_ring_filtered]
- input_frame [default: ]
- output_frame [default: ]
- ring_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/ring_outlier_filter_node.param.yaml]
- launch/ring_passthrough_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/ring_passthrough_filtered/pointcloud]
- input_frame [default: ]
- output_frame [default: base_link]
- passthrough_filter_uint16_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/passthrough_filter_uint16_node.param.yaml]
- launch/time_synchronizer_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/time_synchronizer_node.param.yaml]
- launch/vector_map_inside_area_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: compare_map_filtered/pointcloud]
- output_pointcloud [default: vector_map_inside_area_filtered/pointcloud]
- vector_map_inside_area_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/vector_map_inside_area_filter_node.param.yaml]
- launch/voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/voxel_grid_downsample_filter/pointcloud]
- input_frame [default: base_link]
- output_frame [default: base_link]
- voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_downsample_filter_node.param.yaml]
- launch/voxel_grid_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- voxel_grid_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_outlier_filter_node.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_pointcloud_preprocessor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Kyoichi Sugahara
- Dai Nguyen
- Kenzo Lobos-Tsunekawa
- Yihsiang Fang
- Yoshi Ri
- David Wong
- Melike Tanrikulu
- Max Schmeller
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_pointcloud_preprocessor
Purpose
The autoware_pointcloud_preprocessor is a package that includes the following filters:
- removing outlier points
- cropping
- concatenating pointclouds
- correcting distortion
- downsampling
- densifying pointclouds
Inner-workings / Algorithms
Detail description of each filter’s algorithm is in the following links.
| Filter Name | Description | Detail |
|---|---|---|
| concatenate_data | subscribe multiple pointclouds and concatenate them into a pointcloud | link |
| crop_box_filter | remove points within a given box | link |
| distortion_corrector | compensate pointcloud distortion caused by ego vehicle’s movement during 1 scan | link |
| downsample_filter | downsampling input pointcloud | link |
| outlier_filter | remove points caused by hardware problems, rain drops and small insects as a noise | link |
| passthrough_filter | remove points on the outside of a range in given field (e.g. x, y, z, intensity) | link |
| pointcloud_accumulator | accumulate pointclouds for a given amount of time | link |
| pointcloud_densifier | enhance sparse point clouds by using information from previous frames | link |
| vector_map_filter | remove points on the outside of lane by using vector map | link |
| vector_map_inside_area_filter | remove points inside of vector map area that has given type by parameter | link |
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/indices |
pcl_msgs::msg::Indices |
reference indices |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
input_frame |
string | ” “ | input frame id |
output_frame |
string | ” “ | output frame id |
max_queue_size |
int | 5 | max queue size of input/output topics |
use_indices |
bool | false | flag to use pointcloud indices |
latched_indices |
bool | false | flag to latch pointcloud indices |
approximate_sync |
bool | false | flag to use approximate sync option |
Assumptions / Known limits
autoware::pointcloud_preprocessor::Filter is implemented based on pcl_perception [1] because
of this issue.
Measuring the performance
In Autoware, point cloud data from each LiDAR sensor undergoes preprocessing in the sensing pipeline before being input into the perception pipeline. The preprocessing stages are illustrated in the diagram below:
Each stage in the pipeline incurs a processing delay. Mostly, we’ve used ros2 topic delay /topic_name to measure
the time between the message header and the current time. This approach works well for small-sized messages. However,
when dealing with large point cloud messages, this method introduces an additional delay. This is primarily because
accessing these large point cloud messages externally impacts the pipeline’s performance.
Our sensing/perception nodes are designed to run within composable node containers, leveraging intra-process communication. External subscriptions to these messages (like using ros2 topic delay or rviz2) impose extra delays and can even slow down the pipeline by subscribing externally. Therefore, these measurements will not be accurate.
To mitigate this issue, we’ve adopted a method where each node in the pipeline reports its pipeline latency time. This approach ensures the integrity of intra-process communication and provides a more accurate measure of delays in the pipeline.
Benchmarking The Pipeline
The nodes within the pipeline report the pipeline latency time, indicating the duration from the sensor driver’s pointcloud output to the node’s output. This data is crucial for assessing the pipeline’s health and efficiency.
When running Autoware, you can monitor the pipeline latency times for each node in the pipeline by subscribing to the following ROS 2 topics:
/sensing/lidar/LidarX/crop_box_filter_self/debug/pipeline_latency_ms/sensing/lidar/LidarX/crop_box_filter_mirror/debug/pipeline_latency_ms/sensing/lidar/LidarX/distortion_corrector/debug/pipeline_latency_ms/sensing/lidar/LidarX/ring_outlier_filter/debug/pipeline_latency_ms/sensing/lidar/concatenate_data_synchronizer/debug/sensing/lidar/LidarX/pointcloud/pipeline_latency_ms
These topics provide the pipeline latency times, giving insights into the delays at various stages of the pipeline from the sensor output of LidarX to each subsequent node.
File truncated at 100 lines see the full file
Changelog for package autoware_pointcloud_preprocessor
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
test(blockage_diag): add unit tests to classes for blockage and dust detection (#12029)
- test(blockage_diag): add unit tests for blockage detection functionality
- test(blockage_diag): add unit tests for dust detection functionality
- test(blockage_diag): add unit tests for multi-frame detection aggregator
- test(blockage_diag): reduce integration tests and simplify pointcloud creation
* test(blockage_diag): optimize parameters and remove unnecessary threading in integration tests ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
feat!: remove ROS 2 Galactic codes (#11905)
-
refactor(blockage_diag_node): separate dust detection and multi frame aggregator from blockage diag (#12024)
- refactor(blockage_diag): separate dust detection logic into its own files
- refactor(blockage_diag): separate multi-frame detection aggregator into its own files
* refactor(blockage_diag_node): remove unused includes to clean up code ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
refactor(blockage_diag_node): extract blockage detection logic from blockage diag node (#12012)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
- style(pre-commit): autofix
- refactor(blockage_diag): add missing include directives for string and utility for cpp-lint check
- refactor(blockage_diag): extract dust detection logic into BlockageDetector class
- refactor(blockage_diag): remove unused member variables
- refactor(blockage_diag): reorder class definitions for better readability
- refactor(blockage_diag): remove unused functions definitions from header
- refactor(blockage_diag): simplify no return mask creation by removing quantization step
- refactor(blockage_diag): update diagnostics to return structured results for blockage and dust detection
- refactor(blockage_diag): update dust debug info method to use DustDetectionResult
- refactor(blockage_diag): update publish_blockage_debug_info to include blockage detection result
- refactor(blockage_diag): update debug info methods to use structured parameters
- refactor(blockage_diag): extract blockage detection logic into separate files
- refactor(blockage_diag): unify mask functions
- refactor(blockage_diag): apply clang
- refactor(blockage_diag): restore quantize_8u function to reduce diff in PR
- refactor(blockage_diag): reorder implementation to reduce diff
- fix(blockage_diag): restore lidar_depth_map publish
* style(pre-commit): autofix ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>> Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(polar_voxel_outlier_filter): delete force_update() (#12006)
-
refactor(blockage_diag_node): extract dust detection logic from blockage diag node (#11997)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/approximate_downsample_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/approximate_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- approximate_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/approximate_downsample_filter_node.param.yaml]
- launch/blockage_diag_node.launch.xml
-
- input_topic_name [default: pointcloud_raw_ex]
- output_topic_name [default: blockage_diag/pointcloud]
- blockage_diagnostics_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/blockage_diag_node.param.yaml]
- launch/concatenate_and_time_sync_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_and_time_sync_node.param.yaml]
- launch/concatenate_pointcloud.launch.xml
-
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_pointclouds.param.yaml]
- launch/crop_box_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/self_cropped/pointcloud_ex]
- input_frame [default: base_link]
- output_frame [default: base_link]
- crop_box_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/crop_box_filter_node.param.yaml]
- launch/distortion_corrector_node.launch.xml
-
- input/pointcloud [default: /sensing/lidar/top/mirror_cropped/pointcloud_ex]
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input/imu [default: /sensing/imu/imu_data]
- output/pointcloud [default: /sensing/lidar/top/rectified/pointcloud_ex]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/distortion_corrector_node.param.yaml]
- launch/dual_return_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- dual_return_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/dual_return_outlier_filter_node.param.yaml]
- launch/lanelet2_map_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: detection_area/pointcloud]
- output_pointcloud [default: vector_map_filtered/pointcloud]
- lanelet2_map_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/lanelet2_map_filter_node.param.yaml]
- launch/pickup_based_voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/pickup_based_voxel_grid_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- pickup_based_voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pickup_based_voxel_grid_downsample_filter_node.param.yaml]
- launch/pointcloud_accumulator_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud]
- output_topic_name [default: /sensing/lidar/top/pointcloud_accumulated]
- input_frame [default: base_link]
- output_frame [default: base_link]
- pointcloud_accumulator_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pointcloud_accumulator_node.param.yaml]
- launch/polar_voxel_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- polar_voxel_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/polar_voxel_outlier_filter_node.param.yaml]
- launch/preprocessor.launch.xml
-
- input_points_raw_list [default: ['/points_raw']]
- output_points_raw [default: /points_raw/cropbox/filtered]
- tf_output_frame [default: base_link]
- launch/radius_search_2d_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_filtered]
- input_frame [default: base_link]
- output_frame [default: base_link]
- radius_search_2d_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/radius_search_2d_outlier_filter_node.param.yaml]
- launch/random_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/random_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- random_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/random_downsample_filter_node.param.yaml]
- launch/ring_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_ring_filtered]
- input_frame [default: ]
- output_frame [default: ]
- ring_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/ring_outlier_filter_node.param.yaml]
- launch/ring_passthrough_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/ring_passthrough_filtered/pointcloud]
- input_frame [default: ]
- output_frame [default: base_link]
- passthrough_filter_uint16_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/passthrough_filter_uint16_node.param.yaml]
- launch/time_synchronizer_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/time_synchronizer_node.param.yaml]
- launch/vector_map_inside_area_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: compare_map_filtered/pointcloud]
- output_pointcloud [default: vector_map_inside_area_filtered/pointcloud]
- vector_map_inside_area_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/vector_map_inside_area_filter_node.param.yaml]
- launch/voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/voxel_grid_downsample_filter/pointcloud]
- input_frame [default: base_link]
- output_frame [default: base_link]
- voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_downsample_filter_node.param.yaml]
- launch/voxel_grid_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- voxel_grid_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_outlier_filter_node.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_pointcloud_preprocessor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Kyoichi Sugahara
- Dai Nguyen
- Kenzo Lobos-Tsunekawa
- Yihsiang Fang
- Yoshi Ri
- David Wong
- Melike Tanrikulu
- Max Schmeller
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_pointcloud_preprocessor
Purpose
The autoware_pointcloud_preprocessor is a package that includes the following filters:
- removing outlier points
- cropping
- concatenating pointclouds
- correcting distortion
- downsampling
- densifying pointclouds
Inner-workings / Algorithms
Detail description of each filter’s algorithm is in the following links.
| Filter Name | Description | Detail |
|---|---|---|
| concatenate_data | subscribe multiple pointclouds and concatenate them into a pointcloud | link |
| crop_box_filter | remove points within a given box | link |
| distortion_corrector | compensate pointcloud distortion caused by ego vehicle’s movement during 1 scan | link |
| downsample_filter | downsampling input pointcloud | link |
| outlier_filter | remove points caused by hardware problems, rain drops and small insects as a noise | link |
| passthrough_filter | remove points on the outside of a range in given field (e.g. x, y, z, intensity) | link |
| pointcloud_accumulator | accumulate pointclouds for a given amount of time | link |
| pointcloud_densifier | enhance sparse point clouds by using information from previous frames | link |
| vector_map_filter | remove points on the outside of lane by using vector map | link |
| vector_map_inside_area_filter | remove points inside of vector map area that has given type by parameter | link |
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/indices |
pcl_msgs::msg::Indices |
reference indices |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
input_frame |
string | ” “ | input frame id |
output_frame |
string | ” “ | output frame id |
max_queue_size |
int | 5 | max queue size of input/output topics |
use_indices |
bool | false | flag to use pointcloud indices |
latched_indices |
bool | false | flag to latch pointcloud indices |
approximate_sync |
bool | false | flag to use approximate sync option |
Assumptions / Known limits
autoware::pointcloud_preprocessor::Filter is implemented based on pcl_perception [1] because
of this issue.
Measuring the performance
In Autoware, point cloud data from each LiDAR sensor undergoes preprocessing in the sensing pipeline before being input into the perception pipeline. The preprocessing stages are illustrated in the diagram below:
Each stage in the pipeline incurs a processing delay. Mostly, we’ve used ros2 topic delay /topic_name to measure
the time between the message header and the current time. This approach works well for small-sized messages. However,
when dealing with large point cloud messages, this method introduces an additional delay. This is primarily because
accessing these large point cloud messages externally impacts the pipeline’s performance.
Our sensing/perception nodes are designed to run within composable node containers, leveraging intra-process communication. External subscriptions to these messages (like using ros2 topic delay or rviz2) impose extra delays and can even slow down the pipeline by subscribing externally. Therefore, these measurements will not be accurate.
To mitigate this issue, we’ve adopted a method where each node in the pipeline reports its pipeline latency time. This approach ensures the integrity of intra-process communication and provides a more accurate measure of delays in the pipeline.
Benchmarking The Pipeline
The nodes within the pipeline report the pipeline latency time, indicating the duration from the sensor driver’s pointcloud output to the node’s output. This data is crucial for assessing the pipeline’s health and efficiency.
When running Autoware, you can monitor the pipeline latency times for each node in the pipeline by subscribing to the following ROS 2 topics:
/sensing/lidar/LidarX/crop_box_filter_self/debug/pipeline_latency_ms/sensing/lidar/LidarX/crop_box_filter_mirror/debug/pipeline_latency_ms/sensing/lidar/LidarX/distortion_corrector/debug/pipeline_latency_ms/sensing/lidar/LidarX/ring_outlier_filter/debug/pipeline_latency_ms/sensing/lidar/concatenate_data_synchronizer/debug/sensing/lidar/LidarX/pointcloud/pipeline_latency_ms
These topics provide the pipeline latency times, giving insights into the delays at various stages of the pipeline from the sensor output of LidarX to each subsequent node.
File truncated at 100 lines see the full file
Changelog for package autoware_pointcloud_preprocessor
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
test(blockage_diag): add unit tests to classes for blockage and dust detection (#12029)
- test(blockage_diag): add unit tests for blockage detection functionality
- test(blockage_diag): add unit tests for dust detection functionality
- test(blockage_diag): add unit tests for multi-frame detection aggregator
- test(blockage_diag): reduce integration tests and simplify pointcloud creation
* test(blockage_diag): optimize parameters and remove unnecessary threading in integration tests ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
feat!: remove ROS 2 Galactic codes (#11905)
-
refactor(blockage_diag_node): separate dust detection and multi frame aggregator from blockage diag (#12024)
- refactor(blockage_diag): separate dust detection logic into its own files
- refactor(blockage_diag): separate multi-frame detection aggregator into its own files
* refactor(blockage_diag_node): remove unused includes to clean up code ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
refactor(blockage_diag_node): extract blockage detection logic from blockage diag node (#12012)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
- style(pre-commit): autofix
- refactor(blockage_diag): add missing include directives for string and utility for cpp-lint check
- refactor(blockage_diag): extract dust detection logic into BlockageDetector class
- refactor(blockage_diag): remove unused member variables
- refactor(blockage_diag): reorder class definitions for better readability
- refactor(blockage_diag): remove unused functions definitions from header
- refactor(blockage_diag): simplify no return mask creation by removing quantization step
- refactor(blockage_diag): update diagnostics to return structured results for blockage and dust detection
- refactor(blockage_diag): update dust debug info method to use DustDetectionResult
- refactor(blockage_diag): update publish_blockage_debug_info to include blockage detection result
- refactor(blockage_diag): update debug info methods to use structured parameters
- refactor(blockage_diag): extract blockage detection logic into separate files
- refactor(blockage_diag): unify mask functions
- refactor(blockage_diag): apply clang
- refactor(blockage_diag): restore quantize_8u function to reduce diff in PR
- refactor(blockage_diag): reorder implementation to reduce diff
- fix(blockage_diag): restore lidar_depth_map publish
* style(pre-commit): autofix ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>> Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(polar_voxel_outlier_filter): delete force_update() (#12006)
-
refactor(blockage_diag_node): extract dust detection logic from blockage diag node (#11997)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/approximate_downsample_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/approximate_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- approximate_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/approximate_downsample_filter_node.param.yaml]
- launch/blockage_diag_node.launch.xml
-
- input_topic_name [default: pointcloud_raw_ex]
- output_topic_name [default: blockage_diag/pointcloud]
- blockage_diagnostics_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/blockage_diag_node.param.yaml]
- launch/concatenate_and_time_sync_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_and_time_sync_node.param.yaml]
- launch/concatenate_pointcloud.launch.xml
-
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_pointclouds.param.yaml]
- launch/crop_box_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/self_cropped/pointcloud_ex]
- input_frame [default: base_link]
- output_frame [default: base_link]
- crop_box_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/crop_box_filter_node.param.yaml]
- launch/distortion_corrector_node.launch.xml
-
- input/pointcloud [default: /sensing/lidar/top/mirror_cropped/pointcloud_ex]
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input/imu [default: /sensing/imu/imu_data]
- output/pointcloud [default: /sensing/lidar/top/rectified/pointcloud_ex]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/distortion_corrector_node.param.yaml]
- launch/dual_return_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- dual_return_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/dual_return_outlier_filter_node.param.yaml]
- launch/lanelet2_map_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: detection_area/pointcloud]
- output_pointcloud [default: vector_map_filtered/pointcloud]
- lanelet2_map_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/lanelet2_map_filter_node.param.yaml]
- launch/pickup_based_voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/pickup_based_voxel_grid_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- pickup_based_voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pickup_based_voxel_grid_downsample_filter_node.param.yaml]
- launch/pointcloud_accumulator_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud]
- output_topic_name [default: /sensing/lidar/top/pointcloud_accumulated]
- input_frame [default: base_link]
- output_frame [default: base_link]
- pointcloud_accumulator_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pointcloud_accumulator_node.param.yaml]
- launch/polar_voxel_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- polar_voxel_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/polar_voxel_outlier_filter_node.param.yaml]
- launch/preprocessor.launch.xml
-
- input_points_raw_list [default: ['/points_raw']]
- output_points_raw [default: /points_raw/cropbox/filtered]
- tf_output_frame [default: base_link]
- launch/radius_search_2d_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_filtered]
- input_frame [default: base_link]
- output_frame [default: base_link]
- radius_search_2d_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/radius_search_2d_outlier_filter_node.param.yaml]
- launch/random_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/random_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- random_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/random_downsample_filter_node.param.yaml]
- launch/ring_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_ring_filtered]
- input_frame [default: ]
- output_frame [default: ]
- ring_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/ring_outlier_filter_node.param.yaml]
- launch/ring_passthrough_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/ring_passthrough_filtered/pointcloud]
- input_frame [default: ]
- output_frame [default: base_link]
- passthrough_filter_uint16_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/passthrough_filter_uint16_node.param.yaml]
- launch/time_synchronizer_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/time_synchronizer_node.param.yaml]
- launch/vector_map_inside_area_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: compare_map_filtered/pointcloud]
- output_pointcloud [default: vector_map_inside_area_filtered/pointcloud]
- vector_map_inside_area_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/vector_map_inside_area_filter_node.param.yaml]
- launch/voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/voxel_grid_downsample_filter/pointcloud]
- input_frame [default: base_link]
- output_frame [default: base_link]
- voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_downsample_filter_node.param.yaml]
- launch/voxel_grid_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- voxel_grid_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_outlier_filter_node.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_pointcloud_preprocessor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Kyoichi Sugahara
- Dai Nguyen
- Kenzo Lobos-Tsunekawa
- Yihsiang Fang
- Yoshi Ri
- David Wong
- Melike Tanrikulu
- Max Schmeller
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_pointcloud_preprocessor
Purpose
The autoware_pointcloud_preprocessor is a package that includes the following filters:
- removing outlier points
- cropping
- concatenating pointclouds
- correcting distortion
- downsampling
- densifying pointclouds
Inner-workings / Algorithms
Detail description of each filter’s algorithm is in the following links.
| Filter Name | Description | Detail |
|---|---|---|
| concatenate_data | subscribe multiple pointclouds and concatenate them into a pointcloud | link |
| crop_box_filter | remove points within a given box | link |
| distortion_corrector | compensate pointcloud distortion caused by ego vehicle’s movement during 1 scan | link |
| downsample_filter | downsampling input pointcloud | link |
| outlier_filter | remove points caused by hardware problems, rain drops and small insects as a noise | link |
| passthrough_filter | remove points on the outside of a range in given field (e.g. x, y, z, intensity) | link |
| pointcloud_accumulator | accumulate pointclouds for a given amount of time | link |
| pointcloud_densifier | enhance sparse point clouds by using information from previous frames | link |
| vector_map_filter | remove points on the outside of lane by using vector map | link |
| vector_map_inside_area_filter | remove points inside of vector map area that has given type by parameter | link |
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/indices |
pcl_msgs::msg::Indices |
reference indices |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
input_frame |
string | ” “ | input frame id |
output_frame |
string | ” “ | output frame id |
max_queue_size |
int | 5 | max queue size of input/output topics |
use_indices |
bool | false | flag to use pointcloud indices |
latched_indices |
bool | false | flag to latch pointcloud indices |
approximate_sync |
bool | false | flag to use approximate sync option |
Assumptions / Known limits
autoware::pointcloud_preprocessor::Filter is implemented based on pcl_perception [1] because
of this issue.
Measuring the performance
In Autoware, point cloud data from each LiDAR sensor undergoes preprocessing in the sensing pipeline before being input into the perception pipeline. The preprocessing stages are illustrated in the diagram below:
Each stage in the pipeline incurs a processing delay. Mostly, we’ve used ros2 topic delay /topic_name to measure
the time between the message header and the current time. This approach works well for small-sized messages. However,
when dealing with large point cloud messages, this method introduces an additional delay. This is primarily because
accessing these large point cloud messages externally impacts the pipeline’s performance.
Our sensing/perception nodes are designed to run within composable node containers, leveraging intra-process communication. External subscriptions to these messages (like using ros2 topic delay or rviz2) impose extra delays and can even slow down the pipeline by subscribing externally. Therefore, these measurements will not be accurate.
To mitigate this issue, we’ve adopted a method where each node in the pipeline reports its pipeline latency time. This approach ensures the integrity of intra-process communication and provides a more accurate measure of delays in the pipeline.
Benchmarking The Pipeline
The nodes within the pipeline report the pipeline latency time, indicating the duration from the sensor driver’s pointcloud output to the node’s output. This data is crucial for assessing the pipeline’s health and efficiency.
When running Autoware, you can monitor the pipeline latency times for each node in the pipeline by subscribing to the following ROS 2 topics:
/sensing/lidar/LidarX/crop_box_filter_self/debug/pipeline_latency_ms/sensing/lidar/LidarX/crop_box_filter_mirror/debug/pipeline_latency_ms/sensing/lidar/LidarX/distortion_corrector/debug/pipeline_latency_ms/sensing/lidar/LidarX/ring_outlier_filter/debug/pipeline_latency_ms/sensing/lidar/concatenate_data_synchronizer/debug/sensing/lidar/LidarX/pointcloud/pipeline_latency_ms
These topics provide the pipeline latency times, giving insights into the delays at various stages of the pipeline from the sensor output of LidarX to each subsequent node.
File truncated at 100 lines see the full file
Changelog for package autoware_pointcloud_preprocessor
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
test(blockage_diag): add unit tests to classes for blockage and dust detection (#12029)
- test(blockage_diag): add unit tests for blockage detection functionality
- test(blockage_diag): add unit tests for dust detection functionality
- test(blockage_diag): add unit tests for multi-frame detection aggregator
- test(blockage_diag): reduce integration tests and simplify pointcloud creation
* test(blockage_diag): optimize parameters and remove unnecessary threading in integration tests ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
feat!: remove ROS 2 Galactic codes (#11905)
-
refactor(blockage_diag_node): separate dust detection and multi frame aggregator from blockage diag (#12024)
- refactor(blockage_diag): separate dust detection logic into its own files
- refactor(blockage_diag): separate multi-frame detection aggregator into its own files
* refactor(blockage_diag_node): remove unused includes to clean up code ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
refactor(blockage_diag_node): extract blockage detection logic from blockage diag node (#12012)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
- style(pre-commit): autofix
- refactor(blockage_diag): add missing include directives for string and utility for cpp-lint check
- refactor(blockage_diag): extract dust detection logic into BlockageDetector class
- refactor(blockage_diag): remove unused member variables
- refactor(blockage_diag): reorder class definitions for better readability
- refactor(blockage_diag): remove unused functions definitions from header
- refactor(blockage_diag): simplify no return mask creation by removing quantization step
- refactor(blockage_diag): update diagnostics to return structured results for blockage and dust detection
- refactor(blockage_diag): update dust debug info method to use DustDetectionResult
- refactor(blockage_diag): update publish_blockage_debug_info to include blockage detection result
- refactor(blockage_diag): update debug info methods to use structured parameters
- refactor(blockage_diag): extract blockage detection logic into separate files
- refactor(blockage_diag): unify mask functions
- refactor(blockage_diag): apply clang
- refactor(blockage_diag): restore quantize_8u function to reduce diff in PR
- refactor(blockage_diag): reorder implementation to reduce diff
- fix(blockage_diag): restore lidar_depth_map publish
* style(pre-commit): autofix ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>> Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(polar_voxel_outlier_filter): delete force_update() (#12006)
-
refactor(blockage_diag_node): extract dust detection logic from blockage diag node (#11997)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/approximate_downsample_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/approximate_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- approximate_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/approximate_downsample_filter_node.param.yaml]
- launch/blockage_diag_node.launch.xml
-
- input_topic_name [default: pointcloud_raw_ex]
- output_topic_name [default: blockage_diag/pointcloud]
- blockage_diagnostics_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/blockage_diag_node.param.yaml]
- launch/concatenate_and_time_sync_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_and_time_sync_node.param.yaml]
- launch/concatenate_pointcloud.launch.xml
-
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_pointclouds.param.yaml]
- launch/crop_box_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/self_cropped/pointcloud_ex]
- input_frame [default: base_link]
- output_frame [default: base_link]
- crop_box_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/crop_box_filter_node.param.yaml]
- launch/distortion_corrector_node.launch.xml
-
- input/pointcloud [default: /sensing/lidar/top/mirror_cropped/pointcloud_ex]
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input/imu [default: /sensing/imu/imu_data]
- output/pointcloud [default: /sensing/lidar/top/rectified/pointcloud_ex]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/distortion_corrector_node.param.yaml]
- launch/dual_return_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- dual_return_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/dual_return_outlier_filter_node.param.yaml]
- launch/lanelet2_map_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: detection_area/pointcloud]
- output_pointcloud [default: vector_map_filtered/pointcloud]
- lanelet2_map_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/lanelet2_map_filter_node.param.yaml]
- launch/pickup_based_voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/pickup_based_voxel_grid_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- pickup_based_voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pickup_based_voxel_grid_downsample_filter_node.param.yaml]
- launch/pointcloud_accumulator_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud]
- output_topic_name [default: /sensing/lidar/top/pointcloud_accumulated]
- input_frame [default: base_link]
- output_frame [default: base_link]
- pointcloud_accumulator_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pointcloud_accumulator_node.param.yaml]
- launch/polar_voxel_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- polar_voxel_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/polar_voxel_outlier_filter_node.param.yaml]
- launch/preprocessor.launch.xml
-
- input_points_raw_list [default: ['/points_raw']]
- output_points_raw [default: /points_raw/cropbox/filtered]
- tf_output_frame [default: base_link]
- launch/radius_search_2d_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_filtered]
- input_frame [default: base_link]
- output_frame [default: base_link]
- radius_search_2d_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/radius_search_2d_outlier_filter_node.param.yaml]
- launch/random_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/random_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- random_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/random_downsample_filter_node.param.yaml]
- launch/ring_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_ring_filtered]
- input_frame [default: ]
- output_frame [default: ]
- ring_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/ring_outlier_filter_node.param.yaml]
- launch/ring_passthrough_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/ring_passthrough_filtered/pointcloud]
- input_frame [default: ]
- output_frame [default: base_link]
- passthrough_filter_uint16_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/passthrough_filter_uint16_node.param.yaml]
- launch/time_synchronizer_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/time_synchronizer_node.param.yaml]
- launch/vector_map_inside_area_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: compare_map_filtered/pointcloud]
- output_pointcloud [default: vector_map_inside_area_filtered/pointcloud]
- vector_map_inside_area_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/vector_map_inside_area_filter_node.param.yaml]
- launch/voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/voxel_grid_downsample_filter/pointcloud]
- input_frame [default: base_link]
- output_frame [default: base_link]
- voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_downsample_filter_node.param.yaml]
- launch/voxel_grid_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- voxel_grid_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_outlier_filter_node.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_pointcloud_preprocessor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Kyoichi Sugahara
- Dai Nguyen
- Kenzo Lobos-Tsunekawa
- Yihsiang Fang
- Yoshi Ri
- David Wong
- Melike Tanrikulu
- Max Schmeller
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_pointcloud_preprocessor
Purpose
The autoware_pointcloud_preprocessor is a package that includes the following filters:
- removing outlier points
- cropping
- concatenating pointclouds
- correcting distortion
- downsampling
- densifying pointclouds
Inner-workings / Algorithms
Detail description of each filter’s algorithm is in the following links.
| Filter Name | Description | Detail |
|---|---|---|
| concatenate_data | subscribe multiple pointclouds and concatenate them into a pointcloud | link |
| crop_box_filter | remove points within a given box | link |
| distortion_corrector | compensate pointcloud distortion caused by ego vehicle’s movement during 1 scan | link |
| downsample_filter | downsampling input pointcloud | link |
| outlier_filter | remove points caused by hardware problems, rain drops and small insects as a noise | link |
| passthrough_filter | remove points on the outside of a range in given field (e.g. x, y, z, intensity) | link |
| pointcloud_accumulator | accumulate pointclouds for a given amount of time | link |
| pointcloud_densifier | enhance sparse point clouds by using information from previous frames | link |
| vector_map_filter | remove points on the outside of lane by using vector map | link |
| vector_map_inside_area_filter | remove points inside of vector map area that has given type by parameter | link |
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/indices |
pcl_msgs::msg::Indices |
reference indices |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
input_frame |
string | ” “ | input frame id |
output_frame |
string | ” “ | output frame id |
max_queue_size |
int | 5 | max queue size of input/output topics |
use_indices |
bool | false | flag to use pointcloud indices |
latched_indices |
bool | false | flag to latch pointcloud indices |
approximate_sync |
bool | false | flag to use approximate sync option |
Assumptions / Known limits
autoware::pointcloud_preprocessor::Filter is implemented based on pcl_perception [1] because
of this issue.
Measuring the performance
In Autoware, point cloud data from each LiDAR sensor undergoes preprocessing in the sensing pipeline before being input into the perception pipeline. The preprocessing stages are illustrated in the diagram below:
Each stage in the pipeline incurs a processing delay. Mostly, we’ve used ros2 topic delay /topic_name to measure
the time between the message header and the current time. This approach works well for small-sized messages. However,
when dealing with large point cloud messages, this method introduces an additional delay. This is primarily because
accessing these large point cloud messages externally impacts the pipeline’s performance.
Our sensing/perception nodes are designed to run within composable node containers, leveraging intra-process communication. External subscriptions to these messages (like using ros2 topic delay or rviz2) impose extra delays and can even slow down the pipeline by subscribing externally. Therefore, these measurements will not be accurate.
To mitigate this issue, we’ve adopted a method where each node in the pipeline reports its pipeline latency time. This approach ensures the integrity of intra-process communication and provides a more accurate measure of delays in the pipeline.
Benchmarking The Pipeline
The nodes within the pipeline report the pipeline latency time, indicating the duration from the sensor driver’s pointcloud output to the node’s output. This data is crucial for assessing the pipeline’s health and efficiency.
When running Autoware, you can monitor the pipeline latency times for each node in the pipeline by subscribing to the following ROS 2 topics:
/sensing/lidar/LidarX/crop_box_filter_self/debug/pipeline_latency_ms/sensing/lidar/LidarX/crop_box_filter_mirror/debug/pipeline_latency_ms/sensing/lidar/LidarX/distortion_corrector/debug/pipeline_latency_ms/sensing/lidar/LidarX/ring_outlier_filter/debug/pipeline_latency_ms/sensing/lidar/concatenate_data_synchronizer/debug/sensing/lidar/LidarX/pointcloud/pipeline_latency_ms
These topics provide the pipeline latency times, giving insights into the delays at various stages of the pipeline from the sensor output of LidarX to each subsequent node.
File truncated at 100 lines see the full file
Changelog for package autoware_pointcloud_preprocessor
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
test(blockage_diag): add unit tests to classes for blockage and dust detection (#12029)
- test(blockage_diag): add unit tests for blockage detection functionality
- test(blockage_diag): add unit tests for dust detection functionality
- test(blockage_diag): add unit tests for multi-frame detection aggregator
- test(blockage_diag): reduce integration tests and simplify pointcloud creation
* test(blockage_diag): optimize parameters and remove unnecessary threading in integration tests ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
feat!: remove ROS 2 Galactic codes (#11905)
-
refactor(blockage_diag_node): separate dust detection and multi frame aggregator from blockage diag (#12024)
- refactor(blockage_diag): separate dust detection logic into its own files
- refactor(blockage_diag): separate multi-frame detection aggregator into its own files
* refactor(blockage_diag_node): remove unused includes to clean up code ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
refactor(blockage_diag_node): extract blockage detection logic from blockage diag node (#12012)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
- style(pre-commit): autofix
- refactor(blockage_diag): add missing include directives for string and utility for cpp-lint check
- refactor(blockage_diag): extract dust detection logic into BlockageDetector class
- refactor(blockage_diag): remove unused member variables
- refactor(blockage_diag): reorder class definitions for better readability
- refactor(blockage_diag): remove unused functions definitions from header
- refactor(blockage_diag): simplify no return mask creation by removing quantization step
- refactor(blockage_diag): update diagnostics to return structured results for blockage and dust detection
- refactor(blockage_diag): update dust debug info method to use DustDetectionResult
- refactor(blockage_diag): update publish_blockage_debug_info to include blockage detection result
- refactor(blockage_diag): update debug info methods to use structured parameters
- refactor(blockage_diag): extract blockage detection logic into separate files
- refactor(blockage_diag): unify mask functions
- refactor(blockage_diag): apply clang
- refactor(blockage_diag): restore quantize_8u function to reduce diff in PR
- refactor(blockage_diag): reorder implementation to reduce diff
- fix(blockage_diag): restore lidar_depth_map publish
* style(pre-commit): autofix ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>> Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(polar_voxel_outlier_filter): delete force_update() (#12006)
-
refactor(blockage_diag_node): extract dust detection logic from blockage diag node (#11997)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/approximate_downsample_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/approximate_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- approximate_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/approximate_downsample_filter_node.param.yaml]
- launch/blockage_diag_node.launch.xml
-
- input_topic_name [default: pointcloud_raw_ex]
- output_topic_name [default: blockage_diag/pointcloud]
- blockage_diagnostics_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/blockage_diag_node.param.yaml]
- launch/concatenate_and_time_sync_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_and_time_sync_node.param.yaml]
- launch/concatenate_pointcloud.launch.xml
-
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_pointclouds.param.yaml]
- launch/crop_box_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/self_cropped/pointcloud_ex]
- input_frame [default: base_link]
- output_frame [default: base_link]
- crop_box_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/crop_box_filter_node.param.yaml]
- launch/distortion_corrector_node.launch.xml
-
- input/pointcloud [default: /sensing/lidar/top/mirror_cropped/pointcloud_ex]
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input/imu [default: /sensing/imu/imu_data]
- output/pointcloud [default: /sensing/lidar/top/rectified/pointcloud_ex]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/distortion_corrector_node.param.yaml]
- launch/dual_return_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- dual_return_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/dual_return_outlier_filter_node.param.yaml]
- launch/lanelet2_map_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: detection_area/pointcloud]
- output_pointcloud [default: vector_map_filtered/pointcloud]
- lanelet2_map_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/lanelet2_map_filter_node.param.yaml]
- launch/pickup_based_voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/pickup_based_voxel_grid_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- pickup_based_voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pickup_based_voxel_grid_downsample_filter_node.param.yaml]
- launch/pointcloud_accumulator_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud]
- output_topic_name [default: /sensing/lidar/top/pointcloud_accumulated]
- input_frame [default: base_link]
- output_frame [default: base_link]
- pointcloud_accumulator_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pointcloud_accumulator_node.param.yaml]
- launch/polar_voxel_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- polar_voxel_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/polar_voxel_outlier_filter_node.param.yaml]
- launch/preprocessor.launch.xml
-
- input_points_raw_list [default: ['/points_raw']]
- output_points_raw [default: /points_raw/cropbox/filtered]
- tf_output_frame [default: base_link]
- launch/radius_search_2d_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_filtered]
- input_frame [default: base_link]
- output_frame [default: base_link]
- radius_search_2d_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/radius_search_2d_outlier_filter_node.param.yaml]
- launch/random_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/random_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- random_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/random_downsample_filter_node.param.yaml]
- launch/ring_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_ring_filtered]
- input_frame [default: ]
- output_frame [default: ]
- ring_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/ring_outlier_filter_node.param.yaml]
- launch/ring_passthrough_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/ring_passthrough_filtered/pointcloud]
- input_frame [default: ]
- output_frame [default: base_link]
- passthrough_filter_uint16_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/passthrough_filter_uint16_node.param.yaml]
- launch/time_synchronizer_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/time_synchronizer_node.param.yaml]
- launch/vector_map_inside_area_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: compare_map_filtered/pointcloud]
- output_pointcloud [default: vector_map_inside_area_filtered/pointcloud]
- vector_map_inside_area_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/vector_map_inside_area_filter_node.param.yaml]
- launch/voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/voxel_grid_downsample_filter/pointcloud]
- input_frame [default: base_link]
- output_frame [default: base_link]
- voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_downsample_filter_node.param.yaml]
- launch/voxel_grid_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- voxel_grid_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_outlier_filter_node.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_pointcloud_preprocessor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Kyoichi Sugahara
- Dai Nguyen
- Kenzo Lobos-Tsunekawa
- Yihsiang Fang
- Yoshi Ri
- David Wong
- Melike Tanrikulu
- Max Schmeller
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_pointcloud_preprocessor
Purpose
The autoware_pointcloud_preprocessor is a package that includes the following filters:
- removing outlier points
- cropping
- concatenating pointclouds
- correcting distortion
- downsampling
- densifying pointclouds
Inner-workings / Algorithms
Detail description of each filter’s algorithm is in the following links.
| Filter Name | Description | Detail |
|---|---|---|
| concatenate_data | subscribe multiple pointclouds and concatenate them into a pointcloud | link |
| crop_box_filter | remove points within a given box | link |
| distortion_corrector | compensate pointcloud distortion caused by ego vehicle’s movement during 1 scan | link |
| downsample_filter | downsampling input pointcloud | link |
| outlier_filter | remove points caused by hardware problems, rain drops and small insects as a noise | link |
| passthrough_filter | remove points on the outside of a range in given field (e.g. x, y, z, intensity) | link |
| pointcloud_accumulator | accumulate pointclouds for a given amount of time | link |
| pointcloud_densifier | enhance sparse point clouds by using information from previous frames | link |
| vector_map_filter | remove points on the outside of lane by using vector map | link |
| vector_map_inside_area_filter | remove points inside of vector map area that has given type by parameter | link |
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/indices |
pcl_msgs::msg::Indices |
reference indices |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
input_frame |
string | ” “ | input frame id |
output_frame |
string | ” “ | output frame id |
max_queue_size |
int | 5 | max queue size of input/output topics |
use_indices |
bool | false | flag to use pointcloud indices |
latched_indices |
bool | false | flag to latch pointcloud indices |
approximate_sync |
bool | false | flag to use approximate sync option |
Assumptions / Known limits
autoware::pointcloud_preprocessor::Filter is implemented based on pcl_perception [1] because
of this issue.
Measuring the performance
In Autoware, point cloud data from each LiDAR sensor undergoes preprocessing in the sensing pipeline before being input into the perception pipeline. The preprocessing stages are illustrated in the diagram below:
Each stage in the pipeline incurs a processing delay. Mostly, we’ve used ros2 topic delay /topic_name to measure
the time between the message header and the current time. This approach works well for small-sized messages. However,
when dealing with large point cloud messages, this method introduces an additional delay. This is primarily because
accessing these large point cloud messages externally impacts the pipeline’s performance.
Our sensing/perception nodes are designed to run within composable node containers, leveraging intra-process communication. External subscriptions to these messages (like using ros2 topic delay or rviz2) impose extra delays and can even slow down the pipeline by subscribing externally. Therefore, these measurements will not be accurate.
To mitigate this issue, we’ve adopted a method where each node in the pipeline reports its pipeline latency time. This approach ensures the integrity of intra-process communication and provides a more accurate measure of delays in the pipeline.
Benchmarking The Pipeline
The nodes within the pipeline report the pipeline latency time, indicating the duration from the sensor driver’s pointcloud output to the node’s output. This data is crucial for assessing the pipeline’s health and efficiency.
When running Autoware, you can monitor the pipeline latency times for each node in the pipeline by subscribing to the following ROS 2 topics:
/sensing/lidar/LidarX/crop_box_filter_self/debug/pipeline_latency_ms/sensing/lidar/LidarX/crop_box_filter_mirror/debug/pipeline_latency_ms/sensing/lidar/LidarX/distortion_corrector/debug/pipeline_latency_ms/sensing/lidar/LidarX/ring_outlier_filter/debug/pipeline_latency_ms/sensing/lidar/concatenate_data_synchronizer/debug/sensing/lidar/LidarX/pointcloud/pipeline_latency_ms
These topics provide the pipeline latency times, giving insights into the delays at various stages of the pipeline from the sensor output of LidarX to each subsequent node.
File truncated at 100 lines see the full file
Changelog for package autoware_pointcloud_preprocessor
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
test(blockage_diag): add unit tests to classes for blockage and dust detection (#12029)
- test(blockage_diag): add unit tests for blockage detection functionality
- test(blockage_diag): add unit tests for dust detection functionality
- test(blockage_diag): add unit tests for multi-frame detection aggregator
- test(blockage_diag): reduce integration tests and simplify pointcloud creation
* test(blockage_diag): optimize parameters and remove unnecessary threading in integration tests ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
feat!: remove ROS 2 Galactic codes (#11905)
-
refactor(blockage_diag_node): separate dust detection and multi frame aggregator from blockage diag (#12024)
- refactor(blockage_diag): separate dust detection logic into its own files
- refactor(blockage_diag): separate multi-frame detection aggregator into its own files
* refactor(blockage_diag_node): remove unused includes to clean up code ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
refactor(blockage_diag_node): extract blockage detection logic from blockage diag node (#12012)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
- style(pre-commit): autofix
- refactor(blockage_diag): add missing include directives for string and utility for cpp-lint check
- refactor(blockage_diag): extract dust detection logic into BlockageDetector class
- refactor(blockage_diag): remove unused member variables
- refactor(blockage_diag): reorder class definitions for better readability
- refactor(blockage_diag): remove unused functions definitions from header
- refactor(blockage_diag): simplify no return mask creation by removing quantization step
- refactor(blockage_diag): update diagnostics to return structured results for blockage and dust detection
- refactor(blockage_diag): update dust debug info method to use DustDetectionResult
- refactor(blockage_diag): update publish_blockage_debug_info to include blockage detection result
- refactor(blockage_diag): update debug info methods to use structured parameters
- refactor(blockage_diag): extract blockage detection logic into separate files
- refactor(blockage_diag): unify mask functions
- refactor(blockage_diag): apply clang
- refactor(blockage_diag): restore quantize_8u function to reduce diff in PR
- refactor(blockage_diag): reorder implementation to reduce diff
- fix(blockage_diag): restore lidar_depth_map publish
* style(pre-commit): autofix ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>> Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(polar_voxel_outlier_filter): delete force_update() (#12006)
-
refactor(blockage_diag_node): extract dust detection logic from blockage diag node (#11997)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/approximate_downsample_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/approximate_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- approximate_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/approximate_downsample_filter_node.param.yaml]
- launch/blockage_diag_node.launch.xml
-
- input_topic_name [default: pointcloud_raw_ex]
- output_topic_name [default: blockage_diag/pointcloud]
- blockage_diagnostics_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/blockage_diag_node.param.yaml]
- launch/concatenate_and_time_sync_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_and_time_sync_node.param.yaml]
- launch/concatenate_pointcloud.launch.xml
-
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_pointclouds.param.yaml]
- launch/crop_box_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/self_cropped/pointcloud_ex]
- input_frame [default: base_link]
- output_frame [default: base_link]
- crop_box_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/crop_box_filter_node.param.yaml]
- launch/distortion_corrector_node.launch.xml
-
- input/pointcloud [default: /sensing/lidar/top/mirror_cropped/pointcloud_ex]
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input/imu [default: /sensing/imu/imu_data]
- output/pointcloud [default: /sensing/lidar/top/rectified/pointcloud_ex]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/distortion_corrector_node.param.yaml]
- launch/dual_return_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- dual_return_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/dual_return_outlier_filter_node.param.yaml]
- launch/lanelet2_map_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: detection_area/pointcloud]
- output_pointcloud [default: vector_map_filtered/pointcloud]
- lanelet2_map_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/lanelet2_map_filter_node.param.yaml]
- launch/pickup_based_voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/pickup_based_voxel_grid_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- pickup_based_voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pickup_based_voxel_grid_downsample_filter_node.param.yaml]
- launch/pointcloud_accumulator_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud]
- output_topic_name [default: /sensing/lidar/top/pointcloud_accumulated]
- input_frame [default: base_link]
- output_frame [default: base_link]
- pointcloud_accumulator_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pointcloud_accumulator_node.param.yaml]
- launch/polar_voxel_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- polar_voxel_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/polar_voxel_outlier_filter_node.param.yaml]
- launch/preprocessor.launch.xml
-
- input_points_raw_list [default: ['/points_raw']]
- output_points_raw [default: /points_raw/cropbox/filtered]
- tf_output_frame [default: base_link]
- launch/radius_search_2d_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_filtered]
- input_frame [default: base_link]
- output_frame [default: base_link]
- radius_search_2d_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/radius_search_2d_outlier_filter_node.param.yaml]
- launch/random_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/random_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- random_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/random_downsample_filter_node.param.yaml]
- launch/ring_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_ring_filtered]
- input_frame [default: ]
- output_frame [default: ]
- ring_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/ring_outlier_filter_node.param.yaml]
- launch/ring_passthrough_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/ring_passthrough_filtered/pointcloud]
- input_frame [default: ]
- output_frame [default: base_link]
- passthrough_filter_uint16_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/passthrough_filter_uint16_node.param.yaml]
- launch/time_synchronizer_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/time_synchronizer_node.param.yaml]
- launch/vector_map_inside_area_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: compare_map_filtered/pointcloud]
- output_pointcloud [default: vector_map_inside_area_filtered/pointcloud]
- vector_map_inside_area_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/vector_map_inside_area_filter_node.param.yaml]
- launch/voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/voxel_grid_downsample_filter/pointcloud]
- input_frame [default: base_link]
- output_frame [default: base_link]
- voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_downsample_filter_node.param.yaml]
- launch/voxel_grid_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- voxel_grid_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_outlier_filter_node.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_pointcloud_preprocessor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Kyoichi Sugahara
- Dai Nguyen
- Kenzo Lobos-Tsunekawa
- Yihsiang Fang
- Yoshi Ri
- David Wong
- Melike Tanrikulu
- Max Schmeller
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_pointcloud_preprocessor
Purpose
The autoware_pointcloud_preprocessor is a package that includes the following filters:
- removing outlier points
- cropping
- concatenating pointclouds
- correcting distortion
- downsampling
- densifying pointclouds
Inner-workings / Algorithms
Detail description of each filter’s algorithm is in the following links.
| Filter Name | Description | Detail |
|---|---|---|
| concatenate_data | subscribe multiple pointclouds and concatenate them into a pointcloud | link |
| crop_box_filter | remove points within a given box | link |
| distortion_corrector | compensate pointcloud distortion caused by ego vehicle’s movement during 1 scan | link |
| downsample_filter | downsampling input pointcloud | link |
| outlier_filter | remove points caused by hardware problems, rain drops and small insects as a noise | link |
| passthrough_filter | remove points on the outside of a range in given field (e.g. x, y, z, intensity) | link |
| pointcloud_accumulator | accumulate pointclouds for a given amount of time | link |
| pointcloud_densifier | enhance sparse point clouds by using information from previous frames | link |
| vector_map_filter | remove points on the outside of lane by using vector map | link |
| vector_map_inside_area_filter | remove points inside of vector map area that has given type by parameter | link |
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/indices |
pcl_msgs::msg::Indices |
reference indices |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
input_frame |
string | ” “ | input frame id |
output_frame |
string | ” “ | output frame id |
max_queue_size |
int | 5 | max queue size of input/output topics |
use_indices |
bool | false | flag to use pointcloud indices |
latched_indices |
bool | false | flag to latch pointcloud indices |
approximate_sync |
bool | false | flag to use approximate sync option |
Assumptions / Known limits
autoware::pointcloud_preprocessor::Filter is implemented based on pcl_perception [1] because
of this issue.
Measuring the performance
In Autoware, point cloud data from each LiDAR sensor undergoes preprocessing in the sensing pipeline before being input into the perception pipeline. The preprocessing stages are illustrated in the diagram below:
Each stage in the pipeline incurs a processing delay. Mostly, we’ve used ros2 topic delay /topic_name to measure
the time between the message header and the current time. This approach works well for small-sized messages. However,
when dealing with large point cloud messages, this method introduces an additional delay. This is primarily because
accessing these large point cloud messages externally impacts the pipeline’s performance.
Our sensing/perception nodes are designed to run within composable node containers, leveraging intra-process communication. External subscriptions to these messages (like using ros2 topic delay or rviz2) impose extra delays and can even slow down the pipeline by subscribing externally. Therefore, these measurements will not be accurate.
To mitigate this issue, we’ve adopted a method where each node in the pipeline reports its pipeline latency time. This approach ensures the integrity of intra-process communication and provides a more accurate measure of delays in the pipeline.
Benchmarking The Pipeline
The nodes within the pipeline report the pipeline latency time, indicating the duration from the sensor driver’s pointcloud output to the node’s output. This data is crucial for assessing the pipeline’s health and efficiency.
When running Autoware, you can monitor the pipeline latency times for each node in the pipeline by subscribing to the following ROS 2 topics:
/sensing/lidar/LidarX/crop_box_filter_self/debug/pipeline_latency_ms/sensing/lidar/LidarX/crop_box_filter_mirror/debug/pipeline_latency_ms/sensing/lidar/LidarX/distortion_corrector/debug/pipeline_latency_ms/sensing/lidar/LidarX/ring_outlier_filter/debug/pipeline_latency_ms/sensing/lidar/concatenate_data_synchronizer/debug/sensing/lidar/LidarX/pointcloud/pipeline_latency_ms
These topics provide the pipeline latency times, giving insights into the delays at various stages of the pipeline from the sensor output of LidarX to each subsequent node.
File truncated at 100 lines see the full file
Changelog for package autoware_pointcloud_preprocessor
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
test(blockage_diag): add unit tests to classes for blockage and dust detection (#12029)
- test(blockage_diag): add unit tests for blockage detection functionality
- test(blockage_diag): add unit tests for dust detection functionality
- test(blockage_diag): add unit tests for multi-frame detection aggregator
- test(blockage_diag): reduce integration tests and simplify pointcloud creation
* test(blockage_diag): optimize parameters and remove unnecessary threading in integration tests ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
feat!: remove ROS 2 Galactic codes (#11905)
-
refactor(blockage_diag_node): separate dust detection and multi frame aggregator from blockage diag (#12024)
- refactor(blockage_diag): separate dust detection logic into its own files
- refactor(blockage_diag): separate multi-frame detection aggregator into its own files
* refactor(blockage_diag_node): remove unused includes to clean up code ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
refactor(blockage_diag_node): extract blockage detection logic from blockage diag node (#12012)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
- style(pre-commit): autofix
- refactor(blockage_diag): add missing include directives for string and utility for cpp-lint check
- refactor(blockage_diag): extract dust detection logic into BlockageDetector class
- refactor(blockage_diag): remove unused member variables
- refactor(blockage_diag): reorder class definitions for better readability
- refactor(blockage_diag): remove unused functions definitions from header
- refactor(blockage_diag): simplify no return mask creation by removing quantization step
- refactor(blockage_diag): update diagnostics to return structured results for blockage and dust detection
- refactor(blockage_diag): update dust debug info method to use DustDetectionResult
- refactor(blockage_diag): update publish_blockage_debug_info to include blockage detection result
- refactor(blockage_diag): update debug info methods to use structured parameters
- refactor(blockage_diag): extract blockage detection logic into separate files
- refactor(blockage_diag): unify mask functions
- refactor(blockage_diag): apply clang
- refactor(blockage_diag): restore quantize_8u function to reduce diff in PR
- refactor(blockage_diag): reorder implementation to reduce diff
- fix(blockage_diag): restore lidar_depth_map publish
* style(pre-commit): autofix ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>> Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(polar_voxel_outlier_filter): delete force_update() (#12006)
-
refactor(blockage_diag_node): extract dust detection logic from blockage diag node (#11997)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/approximate_downsample_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/approximate_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- approximate_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/approximate_downsample_filter_node.param.yaml]
- launch/blockage_diag_node.launch.xml
-
- input_topic_name [default: pointcloud_raw_ex]
- output_topic_name [default: blockage_diag/pointcloud]
- blockage_diagnostics_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/blockage_diag_node.param.yaml]
- launch/concatenate_and_time_sync_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_and_time_sync_node.param.yaml]
- launch/concatenate_pointcloud.launch.xml
-
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_pointclouds.param.yaml]
- launch/crop_box_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/self_cropped/pointcloud_ex]
- input_frame [default: base_link]
- output_frame [default: base_link]
- crop_box_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/crop_box_filter_node.param.yaml]
- launch/distortion_corrector_node.launch.xml
-
- input/pointcloud [default: /sensing/lidar/top/mirror_cropped/pointcloud_ex]
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input/imu [default: /sensing/imu/imu_data]
- output/pointcloud [default: /sensing/lidar/top/rectified/pointcloud_ex]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/distortion_corrector_node.param.yaml]
- launch/dual_return_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- dual_return_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/dual_return_outlier_filter_node.param.yaml]
- launch/lanelet2_map_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: detection_area/pointcloud]
- output_pointcloud [default: vector_map_filtered/pointcloud]
- lanelet2_map_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/lanelet2_map_filter_node.param.yaml]
- launch/pickup_based_voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/pickup_based_voxel_grid_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- pickup_based_voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pickup_based_voxel_grid_downsample_filter_node.param.yaml]
- launch/pointcloud_accumulator_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud]
- output_topic_name [default: /sensing/lidar/top/pointcloud_accumulated]
- input_frame [default: base_link]
- output_frame [default: base_link]
- pointcloud_accumulator_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pointcloud_accumulator_node.param.yaml]
- launch/polar_voxel_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- polar_voxel_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/polar_voxel_outlier_filter_node.param.yaml]
- launch/preprocessor.launch.xml
-
- input_points_raw_list [default: ['/points_raw']]
- output_points_raw [default: /points_raw/cropbox/filtered]
- tf_output_frame [default: base_link]
- launch/radius_search_2d_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_filtered]
- input_frame [default: base_link]
- output_frame [default: base_link]
- radius_search_2d_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/radius_search_2d_outlier_filter_node.param.yaml]
- launch/random_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/random_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- random_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/random_downsample_filter_node.param.yaml]
- launch/ring_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_ring_filtered]
- input_frame [default: ]
- output_frame [default: ]
- ring_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/ring_outlier_filter_node.param.yaml]
- launch/ring_passthrough_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/ring_passthrough_filtered/pointcloud]
- input_frame [default: ]
- output_frame [default: base_link]
- passthrough_filter_uint16_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/passthrough_filter_uint16_node.param.yaml]
- launch/time_synchronizer_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/time_synchronizer_node.param.yaml]
- launch/vector_map_inside_area_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: compare_map_filtered/pointcloud]
- output_pointcloud [default: vector_map_inside_area_filtered/pointcloud]
- vector_map_inside_area_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/vector_map_inside_area_filter_node.param.yaml]
- launch/voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/voxel_grid_downsample_filter/pointcloud]
- input_frame [default: base_link]
- output_frame [default: base_link]
- voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_downsample_filter_node.param.yaml]
- launch/voxel_grid_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- voxel_grid_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_outlier_filter_node.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_pointcloud_preprocessor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Kyoichi Sugahara
- Dai Nguyen
- Kenzo Lobos-Tsunekawa
- Yihsiang Fang
- Yoshi Ri
- David Wong
- Melike Tanrikulu
- Max Schmeller
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_pointcloud_preprocessor
Purpose
The autoware_pointcloud_preprocessor is a package that includes the following filters:
- removing outlier points
- cropping
- concatenating pointclouds
- correcting distortion
- downsampling
- densifying pointclouds
Inner-workings / Algorithms
Detail description of each filter’s algorithm is in the following links.
| Filter Name | Description | Detail |
|---|---|---|
| concatenate_data | subscribe multiple pointclouds and concatenate them into a pointcloud | link |
| crop_box_filter | remove points within a given box | link |
| distortion_corrector | compensate pointcloud distortion caused by ego vehicle’s movement during 1 scan | link |
| downsample_filter | downsampling input pointcloud | link |
| outlier_filter | remove points caused by hardware problems, rain drops and small insects as a noise | link |
| passthrough_filter | remove points on the outside of a range in given field (e.g. x, y, z, intensity) | link |
| pointcloud_accumulator | accumulate pointclouds for a given amount of time | link |
| pointcloud_densifier | enhance sparse point clouds by using information from previous frames | link |
| vector_map_filter | remove points on the outside of lane by using vector map | link |
| vector_map_inside_area_filter | remove points inside of vector map area that has given type by parameter | link |
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/indices |
pcl_msgs::msg::Indices |
reference indices |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
input_frame |
string | ” “ | input frame id |
output_frame |
string | ” “ | output frame id |
max_queue_size |
int | 5 | max queue size of input/output topics |
use_indices |
bool | false | flag to use pointcloud indices |
latched_indices |
bool | false | flag to latch pointcloud indices |
approximate_sync |
bool | false | flag to use approximate sync option |
Assumptions / Known limits
autoware::pointcloud_preprocessor::Filter is implemented based on pcl_perception [1] because
of this issue.
Measuring the performance
In Autoware, point cloud data from each LiDAR sensor undergoes preprocessing in the sensing pipeline before being input into the perception pipeline. The preprocessing stages are illustrated in the diagram below:
Each stage in the pipeline incurs a processing delay. Mostly, we’ve used ros2 topic delay /topic_name to measure
the time between the message header and the current time. This approach works well for small-sized messages. However,
when dealing with large point cloud messages, this method introduces an additional delay. This is primarily because
accessing these large point cloud messages externally impacts the pipeline’s performance.
Our sensing/perception nodes are designed to run within composable node containers, leveraging intra-process communication. External subscriptions to these messages (like using ros2 topic delay or rviz2) impose extra delays and can even slow down the pipeline by subscribing externally. Therefore, these measurements will not be accurate.
To mitigate this issue, we’ve adopted a method where each node in the pipeline reports its pipeline latency time. This approach ensures the integrity of intra-process communication and provides a more accurate measure of delays in the pipeline.
Benchmarking The Pipeline
The nodes within the pipeline report the pipeline latency time, indicating the duration from the sensor driver’s pointcloud output to the node’s output. This data is crucial for assessing the pipeline’s health and efficiency.
When running Autoware, you can monitor the pipeline latency times for each node in the pipeline by subscribing to the following ROS 2 topics:
/sensing/lidar/LidarX/crop_box_filter_self/debug/pipeline_latency_ms/sensing/lidar/LidarX/crop_box_filter_mirror/debug/pipeline_latency_ms/sensing/lidar/LidarX/distortion_corrector/debug/pipeline_latency_ms/sensing/lidar/LidarX/ring_outlier_filter/debug/pipeline_latency_ms/sensing/lidar/concatenate_data_synchronizer/debug/sensing/lidar/LidarX/pointcloud/pipeline_latency_ms
These topics provide the pipeline latency times, giving insights into the delays at various stages of the pipeline from the sensor output of LidarX to each subsequent node.
File truncated at 100 lines see the full file
Changelog for package autoware_pointcloud_preprocessor
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
test(blockage_diag): add unit tests to classes for blockage and dust detection (#12029)
- test(blockage_diag): add unit tests for blockage detection functionality
- test(blockage_diag): add unit tests for dust detection functionality
- test(blockage_diag): add unit tests for multi-frame detection aggregator
- test(blockage_diag): reduce integration tests and simplify pointcloud creation
* test(blockage_diag): optimize parameters and remove unnecessary threading in integration tests ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
feat!: remove ROS 2 Galactic codes (#11905)
-
refactor(blockage_diag_node): separate dust detection and multi frame aggregator from blockage diag (#12024)
- refactor(blockage_diag): separate dust detection logic into its own files
- refactor(blockage_diag): separate multi-frame detection aggregator into its own files
* refactor(blockage_diag_node): remove unused includes to clean up code ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
refactor(blockage_diag_node): extract blockage detection logic from blockage diag node (#12012)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
- style(pre-commit): autofix
- refactor(blockage_diag): add missing include directives for string and utility for cpp-lint check
- refactor(blockage_diag): extract dust detection logic into BlockageDetector class
- refactor(blockage_diag): remove unused member variables
- refactor(blockage_diag): reorder class definitions for better readability
- refactor(blockage_diag): remove unused functions definitions from header
- refactor(blockage_diag): simplify no return mask creation by removing quantization step
- refactor(blockage_diag): update diagnostics to return structured results for blockage and dust detection
- refactor(blockage_diag): update dust debug info method to use DustDetectionResult
- refactor(blockage_diag): update publish_blockage_debug_info to include blockage detection result
- refactor(blockage_diag): update debug info methods to use structured parameters
- refactor(blockage_diag): extract blockage detection logic into separate files
- refactor(blockage_diag): unify mask functions
- refactor(blockage_diag): apply clang
- refactor(blockage_diag): restore quantize_8u function to reduce diff in PR
- refactor(blockage_diag): reorder implementation to reduce diff
- fix(blockage_diag): restore lidar_depth_map publish
* style(pre-commit): autofix ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>> Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(polar_voxel_outlier_filter): delete force_update() (#12006)
-
refactor(blockage_diag_node): extract dust detection logic from blockage diag node (#11997)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/approximate_downsample_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/approximate_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- approximate_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/approximate_downsample_filter_node.param.yaml]
- launch/blockage_diag_node.launch.xml
-
- input_topic_name [default: pointcloud_raw_ex]
- output_topic_name [default: blockage_diag/pointcloud]
- blockage_diagnostics_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/blockage_diag_node.param.yaml]
- launch/concatenate_and_time_sync_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_and_time_sync_node.param.yaml]
- launch/concatenate_pointcloud.launch.xml
-
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_pointclouds.param.yaml]
- launch/crop_box_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/self_cropped/pointcloud_ex]
- input_frame [default: base_link]
- output_frame [default: base_link]
- crop_box_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/crop_box_filter_node.param.yaml]
- launch/distortion_corrector_node.launch.xml
-
- input/pointcloud [default: /sensing/lidar/top/mirror_cropped/pointcloud_ex]
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input/imu [default: /sensing/imu/imu_data]
- output/pointcloud [default: /sensing/lidar/top/rectified/pointcloud_ex]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/distortion_corrector_node.param.yaml]
- launch/dual_return_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- dual_return_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/dual_return_outlier_filter_node.param.yaml]
- launch/lanelet2_map_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: detection_area/pointcloud]
- output_pointcloud [default: vector_map_filtered/pointcloud]
- lanelet2_map_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/lanelet2_map_filter_node.param.yaml]
- launch/pickup_based_voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/pickup_based_voxel_grid_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- pickup_based_voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pickup_based_voxel_grid_downsample_filter_node.param.yaml]
- launch/pointcloud_accumulator_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud]
- output_topic_name [default: /sensing/lidar/top/pointcloud_accumulated]
- input_frame [default: base_link]
- output_frame [default: base_link]
- pointcloud_accumulator_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pointcloud_accumulator_node.param.yaml]
- launch/polar_voxel_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- polar_voxel_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/polar_voxel_outlier_filter_node.param.yaml]
- launch/preprocessor.launch.xml
-
- input_points_raw_list [default: ['/points_raw']]
- output_points_raw [default: /points_raw/cropbox/filtered]
- tf_output_frame [default: base_link]
- launch/radius_search_2d_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_filtered]
- input_frame [default: base_link]
- output_frame [default: base_link]
- radius_search_2d_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/radius_search_2d_outlier_filter_node.param.yaml]
- launch/random_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/random_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- random_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/random_downsample_filter_node.param.yaml]
- launch/ring_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_ring_filtered]
- input_frame [default: ]
- output_frame [default: ]
- ring_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/ring_outlier_filter_node.param.yaml]
- launch/ring_passthrough_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/ring_passthrough_filtered/pointcloud]
- input_frame [default: ]
- output_frame [default: base_link]
- passthrough_filter_uint16_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/passthrough_filter_uint16_node.param.yaml]
- launch/time_synchronizer_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/time_synchronizer_node.param.yaml]
- launch/vector_map_inside_area_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: compare_map_filtered/pointcloud]
- output_pointcloud [default: vector_map_inside_area_filtered/pointcloud]
- vector_map_inside_area_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/vector_map_inside_area_filter_node.param.yaml]
- launch/voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/voxel_grid_downsample_filter/pointcloud]
- input_frame [default: base_link]
- output_frame [default: base_link]
- voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_downsample_filter_node.param.yaml]
- launch/voxel_grid_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- voxel_grid_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_outlier_filter_node.param.yaml]
Messages
Services
Plugins
Recent questions tagged autoware_pointcloud_preprocessor at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-06 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- amc-nu
- Yukihiro Saito
- Kyoichi Sugahara
- Dai Nguyen
- Kenzo Lobos-Tsunekawa
- Yihsiang Fang
- Yoshi Ri
- David Wong
- Melike Tanrikulu
- Max Schmeller
- Kaan Colak
Authors
- Open Perception
- Julius Kammerl
- William Woodall
autoware_pointcloud_preprocessor
Purpose
The autoware_pointcloud_preprocessor is a package that includes the following filters:
- removing outlier points
- cropping
- concatenating pointclouds
- correcting distortion
- downsampling
- densifying pointclouds
Inner-workings / Algorithms
Detail description of each filter’s algorithm is in the following links.
| Filter Name | Description | Detail |
|---|---|---|
| concatenate_data | subscribe multiple pointclouds and concatenate them into a pointcloud | link |
| crop_box_filter | remove points within a given box | link |
| distortion_corrector | compensate pointcloud distortion caused by ego vehicle’s movement during 1 scan | link |
| downsample_filter | downsampling input pointcloud | link |
| outlier_filter | remove points caused by hardware problems, rain drops and small insects as a noise | link |
| passthrough_filter | remove points on the outside of a range in given field (e.g. x, y, z, intensity) | link |
| pointcloud_accumulator | accumulate pointclouds for a given amount of time | link |
| pointcloud_densifier | enhance sparse point clouds by using information from previous frames | link |
| vector_map_filter | remove points on the outside of lane by using vector map | link |
| vector_map_inside_area_filter | remove points inside of vector map area that has given type by parameter | link |
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
~/input/points |
sensor_msgs::msg::PointCloud2 |
reference points |
~/input/indices |
pcl_msgs::msg::Indices |
reference indices |
Output
| Name | Type | Description |
|---|---|---|
~/output/points |
sensor_msgs::msg::PointCloud2 |
filtered points |
Parameters
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
input_frame |
string | ” “ | input frame id |
output_frame |
string | ” “ | output frame id |
max_queue_size |
int | 5 | max queue size of input/output topics |
use_indices |
bool | false | flag to use pointcloud indices |
latched_indices |
bool | false | flag to latch pointcloud indices |
approximate_sync |
bool | false | flag to use approximate sync option |
Assumptions / Known limits
autoware::pointcloud_preprocessor::Filter is implemented based on pcl_perception [1] because
of this issue.
Measuring the performance
In Autoware, point cloud data from each LiDAR sensor undergoes preprocessing in the sensing pipeline before being input into the perception pipeline. The preprocessing stages are illustrated in the diagram below:
Each stage in the pipeline incurs a processing delay. Mostly, we’ve used ros2 topic delay /topic_name to measure
the time between the message header and the current time. This approach works well for small-sized messages. However,
when dealing with large point cloud messages, this method introduces an additional delay. This is primarily because
accessing these large point cloud messages externally impacts the pipeline’s performance.
Our sensing/perception nodes are designed to run within composable node containers, leveraging intra-process communication. External subscriptions to these messages (like using ros2 topic delay or rviz2) impose extra delays and can even slow down the pipeline by subscribing externally. Therefore, these measurements will not be accurate.
To mitigate this issue, we’ve adopted a method where each node in the pipeline reports its pipeline latency time. This approach ensures the integrity of intra-process communication and provides a more accurate measure of delays in the pipeline.
Benchmarking The Pipeline
The nodes within the pipeline report the pipeline latency time, indicating the duration from the sensor driver’s pointcloud output to the node’s output. This data is crucial for assessing the pipeline’s health and efficiency.
When running Autoware, you can monitor the pipeline latency times for each node in the pipeline by subscribing to the following ROS 2 topics:
/sensing/lidar/LidarX/crop_box_filter_self/debug/pipeline_latency_ms/sensing/lidar/LidarX/crop_box_filter_mirror/debug/pipeline_latency_ms/sensing/lidar/LidarX/distortion_corrector/debug/pipeline_latency_ms/sensing/lidar/LidarX/ring_outlier_filter/debug/pipeline_latency_ms/sensing/lidar/concatenate_data_synchronizer/debug/sensing/lidar/LidarX/pointcloud/pipeline_latency_ms
These topics provide the pipeline latency times, giving insights into the delays at various stages of the pipeline from the sensor output of LidarX to each subsequent node.
File truncated at 100 lines see the full file
Changelog for package autoware_pointcloud_preprocessor
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
test(blockage_diag): add unit tests to classes for blockage and dust detection (#12029)
- test(blockage_diag): add unit tests for blockage detection functionality
- test(blockage_diag): add unit tests for dust detection functionality
- test(blockage_diag): add unit tests for multi-frame detection aggregator
- test(blockage_diag): reduce integration tests and simplify pointcloud creation
* test(blockage_diag): optimize parameters and remove unnecessary threading in integration tests ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
feat!: remove ROS 2 Galactic codes (#11905)
-
refactor(blockage_diag_node): separate dust detection and multi frame aggregator from blockage diag (#12024)
- refactor(blockage_diag): separate dust detection logic into its own files
- refactor(blockage_diag): separate multi-frame detection aggregator into its own files
* refactor(blockage_diag_node): remove unused includes to clean up code ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>>
-
refactor(blockage_diag_node): extract blockage detection logic from blockage diag node (#12012)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
- style(pre-commit): autofix
- refactor(blockage_diag): add missing include directives for string and utility for cpp-lint check
- refactor(blockage_diag): extract dust detection logic into BlockageDetector class
- refactor(blockage_diag): remove unused member variables
- refactor(blockage_diag): reorder class definitions for better readability
- refactor(blockage_diag): remove unused functions definitions from header
- refactor(blockage_diag): simplify no return mask creation by removing quantization step
- refactor(blockage_diag): update diagnostics to return structured results for blockage and dust detection
- refactor(blockage_diag): update dust debug info method to use DustDetectionResult
- refactor(blockage_diag): update publish_blockage_debug_info to include blockage detection result
- refactor(blockage_diag): update debug info methods to use structured parameters
- refactor(blockage_diag): extract blockage detection logic into separate files
- refactor(blockage_diag): unify mask functions
- refactor(blockage_diag): apply clang
- refactor(blockage_diag): restore quantize_8u function to reduce diff in PR
- refactor(blockage_diag): reorder implementation to reduce diff
- fix(blockage_diag): restore lidar_depth_map publish
* style(pre-commit): autofix ---------Co-authored-by: Takahisa.Ishikawa <<takahisa.ishikawa@tier4.jp>> Co-authored-by: pre-commit-ci-lite[bot] <117423508+pre-commit-ci-lite[bot]@users.noreply.github.com>
-
fix(polar_voxel_outlier_filter): delete force_update() (#12006)
-
refactor(blockage_diag_node): extract dust detection logic from blockage diag node (#11997)
- refactor(blockage_diag): separate dust detection diagnostic logic into evaluate_dust_detection function
- refactor(blockage_diag): extract update_diagnostics_status function for cleaner code
- refactor(blockage_diag): separate dust detection logic into DustDetector class
- refactor(blockage_diag): unified segment_into_ground_and_sky function
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/approximate_downsample_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/approximate_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- approximate_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/approximate_downsample_filter_node.param.yaml]
- launch/blockage_diag_node.launch.xml
-
- input_topic_name [default: pointcloud_raw_ex]
- output_topic_name [default: blockage_diag/pointcloud]
- blockage_diagnostics_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/blockage_diag_node.param.yaml]
- launch/concatenate_and_time_sync_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_and_time_sync_node.param.yaml]
- launch/concatenate_pointcloud.launch.xml
-
- output [default: /sensing/lidar/concatenated/pointcloud]
- output_info [default: /sensing/lidar/concatenated/pointcloud_info]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/concatenate_pointclouds.param.yaml]
- launch/crop_box_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/self_cropped/pointcloud_ex]
- input_frame [default: base_link]
- output_frame [default: base_link]
- crop_box_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/crop_box_filter_node.param.yaml]
- launch/distortion_corrector_node.launch.xml
-
- input/pointcloud [default: /sensing/lidar/top/mirror_cropped/pointcloud_ex]
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- input/imu [default: /sensing/imu/imu_data]
- output/pointcloud [default: /sensing/lidar/top/rectified/pointcloud_ex]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/distortion_corrector_node.param.yaml]
- launch/dual_return_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- dual_return_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/dual_return_outlier_filter_node.param.yaml]
- launch/lanelet2_map_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: detection_area/pointcloud]
- output_pointcloud [default: vector_map_filtered/pointcloud]
- lanelet2_map_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/lanelet2_map_filter_node.param.yaml]
- launch/pickup_based_voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/pickup_based_voxel_grid_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- pickup_based_voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pickup_based_voxel_grid_downsample_filter_node.param.yaml]
- launch/pointcloud_accumulator_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud]
- output_topic_name [default: /sensing/lidar/top/pointcloud_accumulated]
- input_frame [default: base_link]
- output_frame [default: base_link]
- pointcloud_accumulator_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/pointcloud_accumulator_node.param.yaml]
- launch/polar_voxel_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- polar_voxel_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/polar_voxel_outlier_filter_node.param.yaml]
- launch/preprocessor.launch.xml
-
- input_points_raw_list [default: ['/points_raw']]
- output_points_raw [default: /points_raw/cropbox/filtered]
- tf_output_frame [default: base_link]
- launch/radius_search_2d_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_filtered]
- input_frame [default: base_link]
- output_frame [default: base_link]
- radius_search_2d_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/radius_search_2d_outlier_filter_node.param.yaml]
- launch/random_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/random_downsample_filter/pointcloud]
- input_frame [default: ]
- output_frame [default: ]
- random_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/random_downsample_filter_node.param.yaml]
- launch/ring_outlier_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw_ex]
- output_topic_name [default: /sensing/lidar/top/pointcloud_ring_filtered]
- input_frame [default: ]
- output_frame [default: ]
- ring_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/ring_outlier_filter_node.param.yaml]
- launch/ring_passthrough_filter.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/ring_passthrough_filtered/pointcloud]
- input_frame [default: ]
- output_frame [default: base_link]
- passthrough_filter_uint16_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/passthrough_filter_uint16_node.param.yaml]
- launch/time_synchronizer_node.launch.xml
-
- input/twist [default: /sensing/vehicle_velocity_converter/twist_with_covariance]
- param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/time_synchronizer_node.param.yaml]
- launch/vector_map_inside_area_filter_node.launch.xml
-
- input_vector_map [default: /map/vector_map]
- input_pointcloud [default: compare_map_filtered/pointcloud]
- output_pointcloud [default: vector_map_inside_area_filtered/pointcloud]
- vector_map_inside_area_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/vector_map_inside_area_filter_node.param.yaml]
- launch/voxel_grid_downsample_filter_node.launch.xml
-
- input_topic_name [default: /sensing/lidar/top/pointcloud_raw]
- output_topic_name [default: /sensing/lidar/top/voxel_grid_downsample_filter/pointcloud]
- input_frame [default: base_link]
- output_frame [default: base_link]
- voxel_grid_downsample_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_downsample_filter_node.param.yaml]
- launch/voxel_grid_outlier_filter_node.launch.xml
-
- input_topic_name [default: /pointcloud_raw]
- output_topic_name [default: /pointcloud_filtered]
- input_frame [default: ]
- output_frame [default: ]
- voxel_grid_outlier_filter_param_file [default: $(find-pkg-share autoware_pointcloud_preprocessor)/config/voxel_grid_outlier_filter_node.param.yaml]