
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Takayuki Murooka
- Yukinari Hisaki
- Taiki Yamada
- Alqudah Mohammad
Authors
Steer Offset Estimator
Purpose
The role of this node is to automatically estimate the steer_offset used in the lateral controller. The value estimated is the residual bias (on top of the static mechanical bias specified in vehicle calibration files). It also allow for auto or manual calibration of total system bias in real time.
Inner-workings / Algorithms
This module estimates the steering offset using a Kalman Filter algorithm based on vehicle kinematic model constraints.
Kinematic Model
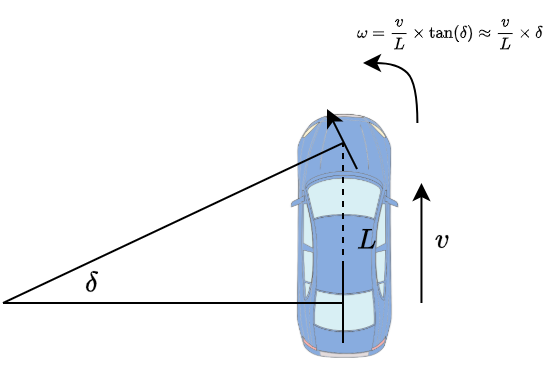
The vehicle kinematic model relates steering angle to angular velocity:
\[\omega = \frac{v}{L} \times \tan(\delta) \approx \frac{v}{L} \times \delta\]Where:
- $\omega$: Angular velocity (yaw rate) [rad/s]
- $v$: Vehicle velocity [m/s]
- $L$: Wheelbase [m]
- $\delta$: Steering angle [rad]
Problem Formulation
Due to mechanical tolerances and sensor calibration errors, there exists a steering offset $\delta_{offset}$. The true relationship becomes:
\[\omega_{observed} = \frac{v}{L} \times (\delta_{measured} + \delta_{offset}) + noise\]The algorithm estimates $\delta_{offset}$ by minimizing the error between observed and predicted angular velocity.
Kalman Filter Algorithm
The Kalman Filter algorithm updates the offset estimate and covariance recursively with time and measurement updates:
-
Regressor and measurement formulation:
\[\phi = \frac{v}{L}\] \[y = \omega_{observed} - \phi \times \delta_{measured}\] -
Time update (process model):
\[P_{prior} = P_{k-1} + Q\] -
Measurement update denominator:
\[denom = R + \phi^2 \times P_{prior}\] -
Kalman gain calculation:
\[K = \frac{P_{prior} \times \phi}{denom}\] -
Innovation (residual) and state update:
\[residual = y - \phi \times \delta_{offset,prev}\] \[\delta_{offset,new} = \delta_{offset,prev} + K \times residual\] -
Covariance update:
\[P_k = P_{prior} - \frac{P_{prior} \times \phi^2 \times P_{prior}}{denom}\]
Where:
- $P$: Estimation covariance matrix (scalar in this 1D case)
- $Q$: Process noise covariance (allows parameter drift)
- $R$: Measurement noise covariance
- $K$: Kalman gain
- $k$: Current time step
Algorithm Constraints
The algorithm only updates when:
- Both pose and steering data are available
- Vehicle velocity >
min_velocity(ensures reliable kinematic model) -
$ \delta_{\text{measured}} $ < max_steer(avoids nonlinear tire behavior)
File truncated at 100 lines see the full file
Changelog for package autoware_steer_offset_estimator
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(steer_offset_estimator): implement new steer offset estimator using kalman filter (#11911)
- refactor(steer_offset_estimator): restructure node and estimator implementation
- Updated the CMakeLists.txt to reflect new library and executable structure.
- Removed outdated README and added a new detailed README.md for better documentation.
- Introduced a new node class for steer offset estimation and refactored the estimator logic.
- Added utility functions for pose and steering calculations.
- Implemented tests for the estimator and utility functions to ensure reliability.
- Updated parameters in the schema and configuration files for improved clarity and functionality.
- Removed deprecated files and images to streamline the package. This commit enhances the overall architecture and usability of the steer offset estimator package.
- refactor(steer_offset_estimator): update CMake configuration and remove deprecated files
- Bump CMake minimum version to 3.14 and adjust project structure in CMakeLists.txt.
- Refactor library and executable definitions for clarity and maintainability.
- Remove the main.cpp file as the node is now defined in a separate header and source file.
- Update parameter comments in the configuration file for better clarity.
- Remove the glog dependency from package.xml to streamline dependencies. This commit enhances the organization and readability of the steer offset estimator package.
- docs(steer_offset_estimator): enhance README formatting for mathematical equations
- Improved the formatting of mathematical equations in the README.md to enhance readability by adding line breaks.
- Removed the monitoring section to streamline the documentation. This update aims to provide clearer guidance on the steering offset estimation algorithm and its implementation details.
- docs(steer_offset_estimator): add debug info output section to README
- docs(steer_offset_estimator): improve formatting of algorithm steps in README
- feat(steer_offset_estimator): enhance estimator parameters and update calculations
- Added new parameters: measurement_noise, denominator_floor, and covariance_floor to improve estimation stability.
- Refactored the update logic to incorporate Kalman gain and residual calculations, enhancing the accuracy of the steering offset estimation.
- Updated debug output to reflect new calculation metrics, including kalman_gain and residual. This commit improves the robustness and performance of the steer offset estimator by refining its parameterization and calculation methods.
- feat(steer_offset_estimator): add new parameters for enhanced estimation
- Introduced measurement_noise, denominator_floor, and covariance_floor parameters to the SteerOffsetEstimatorParameters structure.
- Updated the parameter loading function to accommodate the new parameters, improving the configurability of the estimator. This change aims to enhance the performance and stability of the steering offset estimation process by allowing for more precise parameter tuning.
- fix(steer_offset_estimator): update debug output to use standard deviation
- Modified the debug output format in the SteerOffsetEstimatorNode to replace covariance with standard deviation for clarity.
- This change enhances the readability of the debug information by providing a more intuitive metric for uncertainty.
- refactor(steer_offset_estimator): rename and restructure noise parameters for clarity
- Renamed measurement_noise to measurement_noise_covariance and added process_noise_covariance to the SteerOffsetEstimatorParameters structure for better clarity.
- Updated the parameter loading function to reflect these changes, enhancing the configurability of the estimator.
- Refactored the update logic to utilize the new covariance parameters, improving the accuracy of the steering offset estimation. This commit aims to streamline the parameterization and enhance the performance of the steer offset estimator.
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/steer_offset_estimator.launch.xml
-
- config_file [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset_estimator.param.yaml]
- steer_offset_log_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_log_param_name [default: steer_offset]
- steer_offset_calibration_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_calibration_param_name [default: residual_steering_offset]
Messages
Services
Plugins
Recent questions tagged autoware_steer_offset_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Takayuki Murooka
- Yukinari Hisaki
- Taiki Yamada
- Alqudah Mohammad
Authors
Steer Offset Estimator
Purpose
The role of this node is to automatically estimate the steer_offset used in the lateral controller. The value estimated is the residual bias (on top of the static mechanical bias specified in vehicle calibration files). It also allow for auto or manual calibration of total system bias in real time.
Inner-workings / Algorithms
This module estimates the steering offset using a Kalman Filter algorithm based on vehicle kinematic model constraints.
Kinematic Model
The vehicle kinematic model relates steering angle to angular velocity:
\[\omega = \frac{v}{L} \times \tan(\delta) \approx \frac{v}{L} \times \delta\]Where:
- $\omega$: Angular velocity (yaw rate) [rad/s]
- $v$: Vehicle velocity [m/s]
- $L$: Wheelbase [m]
- $\delta$: Steering angle [rad]
Problem Formulation
Due to mechanical tolerances and sensor calibration errors, there exists a steering offset $\delta_{offset}$. The true relationship becomes:
\[\omega_{observed} = \frac{v}{L} \times (\delta_{measured} + \delta_{offset}) + noise\]The algorithm estimates $\delta_{offset}$ by minimizing the error between observed and predicted angular velocity.
Kalman Filter Algorithm
The Kalman Filter algorithm updates the offset estimate and covariance recursively with time and measurement updates:
-
Regressor and measurement formulation:
\[\phi = \frac{v}{L}\] \[y = \omega_{observed} - \phi \times \delta_{measured}\] -
Time update (process model):
\[P_{prior} = P_{k-1} + Q\] -
Measurement update denominator:
\[denom = R + \phi^2 \times P_{prior}\] -
Kalman gain calculation:
\[K = \frac{P_{prior} \times \phi}{denom}\] -
Innovation (residual) and state update:
\[residual = y - \phi \times \delta_{offset,prev}\] \[\delta_{offset,new} = \delta_{offset,prev} + K \times residual\] -
Covariance update:
\[P_k = P_{prior} - \frac{P_{prior} \times \phi^2 \times P_{prior}}{denom}\]
Where:
- $P$: Estimation covariance matrix (scalar in this 1D case)
- $Q$: Process noise covariance (allows parameter drift)
- $R$: Measurement noise covariance
- $K$: Kalman gain
- $k$: Current time step
Algorithm Constraints
The algorithm only updates when:
- Both pose and steering data are available
- Vehicle velocity >
min_velocity(ensures reliable kinematic model) -
$ \delta_{\text{measured}} $ < max_steer(avoids nonlinear tire behavior)
File truncated at 100 lines see the full file
Changelog for package autoware_steer_offset_estimator
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(steer_offset_estimator): implement new steer offset estimator using kalman filter (#11911)
- refactor(steer_offset_estimator): restructure node and estimator implementation
- Updated the CMakeLists.txt to reflect new library and executable structure.
- Removed outdated README and added a new detailed README.md for better documentation.
- Introduced a new node class for steer offset estimation and refactored the estimator logic.
- Added utility functions for pose and steering calculations.
- Implemented tests for the estimator and utility functions to ensure reliability.
- Updated parameters in the schema and configuration files for improved clarity and functionality.
- Removed deprecated files and images to streamline the package. This commit enhances the overall architecture and usability of the steer offset estimator package.
- refactor(steer_offset_estimator): update CMake configuration and remove deprecated files
- Bump CMake minimum version to 3.14 and adjust project structure in CMakeLists.txt.
- Refactor library and executable definitions for clarity and maintainability.
- Remove the main.cpp file as the node is now defined in a separate header and source file.
- Update parameter comments in the configuration file for better clarity.
- Remove the glog dependency from package.xml to streamline dependencies. This commit enhances the organization and readability of the steer offset estimator package.
- docs(steer_offset_estimator): enhance README formatting for mathematical equations
- Improved the formatting of mathematical equations in the README.md to enhance readability by adding line breaks.
- Removed the monitoring section to streamline the documentation. This update aims to provide clearer guidance on the steering offset estimation algorithm and its implementation details.
- docs(steer_offset_estimator): add debug info output section to README
- docs(steer_offset_estimator): improve formatting of algorithm steps in README
- feat(steer_offset_estimator): enhance estimator parameters and update calculations
- Added new parameters: measurement_noise, denominator_floor, and covariance_floor to improve estimation stability.
- Refactored the update logic to incorporate Kalman gain and residual calculations, enhancing the accuracy of the steering offset estimation.
- Updated debug output to reflect new calculation metrics, including kalman_gain and residual. This commit improves the robustness and performance of the steer offset estimator by refining its parameterization and calculation methods.
- feat(steer_offset_estimator): add new parameters for enhanced estimation
- Introduced measurement_noise, denominator_floor, and covariance_floor parameters to the SteerOffsetEstimatorParameters structure.
- Updated the parameter loading function to accommodate the new parameters, improving the configurability of the estimator. This change aims to enhance the performance and stability of the steering offset estimation process by allowing for more precise parameter tuning.
- fix(steer_offset_estimator): update debug output to use standard deviation
- Modified the debug output format in the SteerOffsetEstimatorNode to replace covariance with standard deviation for clarity.
- This change enhances the readability of the debug information by providing a more intuitive metric for uncertainty.
- refactor(steer_offset_estimator): rename and restructure noise parameters for clarity
- Renamed measurement_noise to measurement_noise_covariance and added process_noise_covariance to the SteerOffsetEstimatorParameters structure for better clarity.
- Updated the parameter loading function to reflect these changes, enhancing the configurability of the estimator.
- Refactored the update logic to utilize the new covariance parameters, improving the accuracy of the steering offset estimation. This commit aims to streamline the parameterization and enhance the performance of the steer offset estimator.
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/steer_offset_estimator.launch.xml
-
- config_file [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset_estimator.param.yaml]
- steer_offset_log_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_log_param_name [default: steer_offset]
- steer_offset_calibration_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_calibration_param_name [default: residual_steering_offset]
Messages
Services
Plugins
Recent questions tagged autoware_steer_offset_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Takayuki Murooka
- Yukinari Hisaki
- Taiki Yamada
- Alqudah Mohammad
Authors
Steer Offset Estimator
Purpose
The role of this node is to automatically estimate the steer_offset used in the lateral controller. The value estimated is the residual bias (on top of the static mechanical bias specified in vehicle calibration files). It also allow for auto or manual calibration of total system bias in real time.
Inner-workings / Algorithms
This module estimates the steering offset using a Kalman Filter algorithm based on vehicle kinematic model constraints.
Kinematic Model
The vehicle kinematic model relates steering angle to angular velocity:
\[\omega = \frac{v}{L} \times \tan(\delta) \approx \frac{v}{L} \times \delta\]Where:
- $\omega$: Angular velocity (yaw rate) [rad/s]
- $v$: Vehicle velocity [m/s]
- $L$: Wheelbase [m]
- $\delta$: Steering angle [rad]
Problem Formulation
Due to mechanical tolerances and sensor calibration errors, there exists a steering offset $\delta_{offset}$. The true relationship becomes:
\[\omega_{observed} = \frac{v}{L} \times (\delta_{measured} + \delta_{offset}) + noise\]The algorithm estimates $\delta_{offset}$ by minimizing the error between observed and predicted angular velocity.
Kalman Filter Algorithm
The Kalman Filter algorithm updates the offset estimate and covariance recursively with time and measurement updates:
-
Regressor and measurement formulation:
\[\phi = \frac{v}{L}\] \[y = \omega_{observed} - \phi \times \delta_{measured}\] -
Time update (process model):
\[P_{prior} = P_{k-1} + Q\] -
Measurement update denominator:
\[denom = R + \phi^2 \times P_{prior}\] -
Kalman gain calculation:
\[K = \frac{P_{prior} \times \phi}{denom}\] -
Innovation (residual) and state update:
\[residual = y - \phi \times \delta_{offset,prev}\] \[\delta_{offset,new} = \delta_{offset,prev} + K \times residual\] -
Covariance update:
\[P_k = P_{prior} - \frac{P_{prior} \times \phi^2 \times P_{prior}}{denom}\]
Where:
- $P$: Estimation covariance matrix (scalar in this 1D case)
- $Q$: Process noise covariance (allows parameter drift)
- $R$: Measurement noise covariance
- $K$: Kalman gain
- $k$: Current time step
Algorithm Constraints
The algorithm only updates when:
- Both pose and steering data are available
- Vehicle velocity >
min_velocity(ensures reliable kinematic model) -
$ \delta_{\text{measured}} $ < max_steer(avoids nonlinear tire behavior)
File truncated at 100 lines see the full file
Changelog for package autoware_steer_offset_estimator
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(steer_offset_estimator): implement new steer offset estimator using kalman filter (#11911)
- refactor(steer_offset_estimator): restructure node and estimator implementation
- Updated the CMakeLists.txt to reflect new library and executable structure.
- Removed outdated README and added a new detailed README.md for better documentation.
- Introduced a new node class for steer offset estimation and refactored the estimator logic.
- Added utility functions for pose and steering calculations.
- Implemented tests for the estimator and utility functions to ensure reliability.
- Updated parameters in the schema and configuration files for improved clarity and functionality.
- Removed deprecated files and images to streamline the package. This commit enhances the overall architecture and usability of the steer offset estimator package.
- refactor(steer_offset_estimator): update CMake configuration and remove deprecated files
- Bump CMake minimum version to 3.14 and adjust project structure in CMakeLists.txt.
- Refactor library and executable definitions for clarity and maintainability.
- Remove the main.cpp file as the node is now defined in a separate header and source file.
- Update parameter comments in the configuration file for better clarity.
- Remove the glog dependency from package.xml to streamline dependencies. This commit enhances the organization and readability of the steer offset estimator package.
- docs(steer_offset_estimator): enhance README formatting for mathematical equations
- Improved the formatting of mathematical equations in the README.md to enhance readability by adding line breaks.
- Removed the monitoring section to streamline the documentation. This update aims to provide clearer guidance on the steering offset estimation algorithm and its implementation details.
- docs(steer_offset_estimator): add debug info output section to README
- docs(steer_offset_estimator): improve formatting of algorithm steps in README
- feat(steer_offset_estimator): enhance estimator parameters and update calculations
- Added new parameters: measurement_noise, denominator_floor, and covariance_floor to improve estimation stability.
- Refactored the update logic to incorporate Kalman gain and residual calculations, enhancing the accuracy of the steering offset estimation.
- Updated debug output to reflect new calculation metrics, including kalman_gain and residual. This commit improves the robustness and performance of the steer offset estimator by refining its parameterization and calculation methods.
- feat(steer_offset_estimator): add new parameters for enhanced estimation
- Introduced measurement_noise, denominator_floor, and covariance_floor parameters to the SteerOffsetEstimatorParameters structure.
- Updated the parameter loading function to accommodate the new parameters, improving the configurability of the estimator. This change aims to enhance the performance and stability of the steering offset estimation process by allowing for more precise parameter tuning.
- fix(steer_offset_estimator): update debug output to use standard deviation
- Modified the debug output format in the SteerOffsetEstimatorNode to replace covariance with standard deviation for clarity.
- This change enhances the readability of the debug information by providing a more intuitive metric for uncertainty.
- refactor(steer_offset_estimator): rename and restructure noise parameters for clarity
- Renamed measurement_noise to measurement_noise_covariance and added process_noise_covariance to the SteerOffsetEstimatorParameters structure for better clarity.
- Updated the parameter loading function to reflect these changes, enhancing the configurability of the estimator.
- Refactored the update logic to utilize the new covariance parameters, improving the accuracy of the steering offset estimation. This commit aims to streamline the parameterization and enhance the performance of the steer offset estimator.
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/steer_offset_estimator.launch.xml
-
- config_file [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset_estimator.param.yaml]
- steer_offset_log_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_log_param_name [default: steer_offset]
- steer_offset_calibration_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_calibration_param_name [default: residual_steering_offset]
Messages
Services
Plugins
Recent questions tagged autoware_steer_offset_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Takayuki Murooka
- Yukinari Hisaki
- Taiki Yamada
- Alqudah Mohammad
Authors
Steer Offset Estimator
Purpose
The role of this node is to automatically estimate the steer_offset used in the lateral controller. The value estimated is the residual bias (on top of the static mechanical bias specified in vehicle calibration files). It also allow for auto or manual calibration of total system bias in real time.
Inner-workings / Algorithms
This module estimates the steering offset using a Kalman Filter algorithm based on vehicle kinematic model constraints.
Kinematic Model
The vehicle kinematic model relates steering angle to angular velocity:
\[\omega = \frac{v}{L} \times \tan(\delta) \approx \frac{v}{L} \times \delta\]Where:
- $\omega$: Angular velocity (yaw rate) [rad/s]
- $v$: Vehicle velocity [m/s]
- $L$: Wheelbase [m]
- $\delta$: Steering angle [rad]
Problem Formulation
Due to mechanical tolerances and sensor calibration errors, there exists a steering offset $\delta_{offset}$. The true relationship becomes:
\[\omega_{observed} = \frac{v}{L} \times (\delta_{measured} + \delta_{offset}) + noise\]The algorithm estimates $\delta_{offset}$ by minimizing the error between observed and predicted angular velocity.
Kalman Filter Algorithm
The Kalman Filter algorithm updates the offset estimate and covariance recursively with time and measurement updates:
-
Regressor and measurement formulation:
\[\phi = \frac{v}{L}\] \[y = \omega_{observed} - \phi \times \delta_{measured}\] -
Time update (process model):
\[P_{prior} = P_{k-1} + Q\] -
Measurement update denominator:
\[denom = R + \phi^2 \times P_{prior}\] -
Kalman gain calculation:
\[K = \frac{P_{prior} \times \phi}{denom}\] -
Innovation (residual) and state update:
\[residual = y - \phi \times \delta_{offset,prev}\] \[\delta_{offset,new} = \delta_{offset,prev} + K \times residual\] -
Covariance update:
\[P_k = P_{prior} - \frac{P_{prior} \times \phi^2 \times P_{prior}}{denom}\]
Where:
- $P$: Estimation covariance matrix (scalar in this 1D case)
- $Q$: Process noise covariance (allows parameter drift)
- $R$: Measurement noise covariance
- $K$: Kalman gain
- $k$: Current time step
Algorithm Constraints
The algorithm only updates when:
- Both pose and steering data are available
- Vehicle velocity >
min_velocity(ensures reliable kinematic model) -
$ \delta_{\text{measured}} $ < max_steer(avoids nonlinear tire behavior)
File truncated at 100 lines see the full file
Changelog for package autoware_steer_offset_estimator
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(steer_offset_estimator): implement new steer offset estimator using kalman filter (#11911)
- refactor(steer_offset_estimator): restructure node and estimator implementation
- Updated the CMakeLists.txt to reflect new library and executable structure.
- Removed outdated README and added a new detailed README.md for better documentation.
- Introduced a new node class for steer offset estimation and refactored the estimator logic.
- Added utility functions for pose and steering calculations.
- Implemented tests for the estimator and utility functions to ensure reliability.
- Updated parameters in the schema and configuration files for improved clarity and functionality.
- Removed deprecated files and images to streamline the package. This commit enhances the overall architecture and usability of the steer offset estimator package.
- refactor(steer_offset_estimator): update CMake configuration and remove deprecated files
- Bump CMake minimum version to 3.14 and adjust project structure in CMakeLists.txt.
- Refactor library and executable definitions for clarity and maintainability.
- Remove the main.cpp file as the node is now defined in a separate header and source file.
- Update parameter comments in the configuration file for better clarity.
- Remove the glog dependency from package.xml to streamline dependencies. This commit enhances the organization and readability of the steer offset estimator package.
- docs(steer_offset_estimator): enhance README formatting for mathematical equations
- Improved the formatting of mathematical equations in the README.md to enhance readability by adding line breaks.
- Removed the monitoring section to streamline the documentation. This update aims to provide clearer guidance on the steering offset estimation algorithm and its implementation details.
- docs(steer_offset_estimator): add debug info output section to README
- docs(steer_offset_estimator): improve formatting of algorithm steps in README
- feat(steer_offset_estimator): enhance estimator parameters and update calculations
- Added new parameters: measurement_noise, denominator_floor, and covariance_floor to improve estimation stability.
- Refactored the update logic to incorporate Kalman gain and residual calculations, enhancing the accuracy of the steering offset estimation.
- Updated debug output to reflect new calculation metrics, including kalman_gain and residual. This commit improves the robustness and performance of the steer offset estimator by refining its parameterization and calculation methods.
- feat(steer_offset_estimator): add new parameters for enhanced estimation
- Introduced measurement_noise, denominator_floor, and covariance_floor parameters to the SteerOffsetEstimatorParameters structure.
- Updated the parameter loading function to accommodate the new parameters, improving the configurability of the estimator. This change aims to enhance the performance and stability of the steering offset estimation process by allowing for more precise parameter tuning.
- fix(steer_offset_estimator): update debug output to use standard deviation
- Modified the debug output format in the SteerOffsetEstimatorNode to replace covariance with standard deviation for clarity.
- This change enhances the readability of the debug information by providing a more intuitive metric for uncertainty.
- refactor(steer_offset_estimator): rename and restructure noise parameters for clarity
- Renamed measurement_noise to measurement_noise_covariance and added process_noise_covariance to the SteerOffsetEstimatorParameters structure for better clarity.
- Updated the parameter loading function to reflect these changes, enhancing the configurability of the estimator.
- Refactored the update logic to utilize the new covariance parameters, improving the accuracy of the steering offset estimation. This commit aims to streamline the parameterization and enhance the performance of the steer offset estimator.
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/steer_offset_estimator.launch.xml
-
- config_file [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset_estimator.param.yaml]
- steer_offset_log_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_log_param_name [default: steer_offset]
- steer_offset_calibration_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_calibration_param_name [default: residual_steering_offset]
Messages
Services
Plugins
Recent questions tagged autoware_steer_offset_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Takayuki Murooka
- Yukinari Hisaki
- Taiki Yamada
- Alqudah Mohammad
Authors
Steer Offset Estimator
Purpose
The role of this node is to automatically estimate the steer_offset used in the lateral controller. The value estimated is the residual bias (on top of the static mechanical bias specified in vehicle calibration files). It also allow for auto or manual calibration of total system bias in real time.
Inner-workings / Algorithms
This module estimates the steering offset using a Kalman Filter algorithm based on vehicle kinematic model constraints.
Kinematic Model
The vehicle kinematic model relates steering angle to angular velocity:
\[\omega = \frac{v}{L} \times \tan(\delta) \approx \frac{v}{L} \times \delta\]Where:
- $\omega$: Angular velocity (yaw rate) [rad/s]
- $v$: Vehicle velocity [m/s]
- $L$: Wheelbase [m]
- $\delta$: Steering angle [rad]
Problem Formulation
Due to mechanical tolerances and sensor calibration errors, there exists a steering offset $\delta_{offset}$. The true relationship becomes:
\[\omega_{observed} = \frac{v}{L} \times (\delta_{measured} + \delta_{offset}) + noise\]The algorithm estimates $\delta_{offset}$ by minimizing the error between observed and predicted angular velocity.
Kalman Filter Algorithm
The Kalman Filter algorithm updates the offset estimate and covariance recursively with time and measurement updates:
-
Regressor and measurement formulation:
\[\phi = \frac{v}{L}\] \[y = \omega_{observed} - \phi \times \delta_{measured}\] -
Time update (process model):
\[P_{prior} = P_{k-1} + Q\] -
Measurement update denominator:
\[denom = R + \phi^2 \times P_{prior}\] -
Kalman gain calculation:
\[K = \frac{P_{prior} \times \phi}{denom}\] -
Innovation (residual) and state update:
\[residual = y - \phi \times \delta_{offset,prev}\] \[\delta_{offset,new} = \delta_{offset,prev} + K \times residual\] -
Covariance update:
\[P_k = P_{prior} - \frac{P_{prior} \times \phi^2 \times P_{prior}}{denom}\]
Where:
- $P$: Estimation covariance matrix (scalar in this 1D case)
- $Q$: Process noise covariance (allows parameter drift)
- $R$: Measurement noise covariance
- $K$: Kalman gain
- $k$: Current time step
Algorithm Constraints
The algorithm only updates when:
- Both pose and steering data are available
- Vehicle velocity >
min_velocity(ensures reliable kinematic model) -
$ \delta_{\text{measured}} $ < max_steer(avoids nonlinear tire behavior)
File truncated at 100 lines see the full file
Changelog for package autoware_steer_offset_estimator
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(steer_offset_estimator): implement new steer offset estimator using kalman filter (#11911)
- refactor(steer_offset_estimator): restructure node and estimator implementation
- Updated the CMakeLists.txt to reflect new library and executable structure.
- Removed outdated README and added a new detailed README.md for better documentation.
- Introduced a new node class for steer offset estimation and refactored the estimator logic.
- Added utility functions for pose and steering calculations.
- Implemented tests for the estimator and utility functions to ensure reliability.
- Updated parameters in the schema and configuration files for improved clarity and functionality.
- Removed deprecated files and images to streamline the package. This commit enhances the overall architecture and usability of the steer offset estimator package.
- refactor(steer_offset_estimator): update CMake configuration and remove deprecated files
- Bump CMake minimum version to 3.14 and adjust project structure in CMakeLists.txt.
- Refactor library and executable definitions for clarity and maintainability.
- Remove the main.cpp file as the node is now defined in a separate header and source file.
- Update parameter comments in the configuration file for better clarity.
- Remove the glog dependency from package.xml to streamline dependencies. This commit enhances the organization and readability of the steer offset estimator package.
- docs(steer_offset_estimator): enhance README formatting for mathematical equations
- Improved the formatting of mathematical equations in the README.md to enhance readability by adding line breaks.
- Removed the monitoring section to streamline the documentation. This update aims to provide clearer guidance on the steering offset estimation algorithm and its implementation details.
- docs(steer_offset_estimator): add debug info output section to README
- docs(steer_offset_estimator): improve formatting of algorithm steps in README
- feat(steer_offset_estimator): enhance estimator parameters and update calculations
- Added new parameters: measurement_noise, denominator_floor, and covariance_floor to improve estimation stability.
- Refactored the update logic to incorporate Kalman gain and residual calculations, enhancing the accuracy of the steering offset estimation.
- Updated debug output to reflect new calculation metrics, including kalman_gain and residual. This commit improves the robustness and performance of the steer offset estimator by refining its parameterization and calculation methods.
- feat(steer_offset_estimator): add new parameters for enhanced estimation
- Introduced measurement_noise, denominator_floor, and covariance_floor parameters to the SteerOffsetEstimatorParameters structure.
- Updated the parameter loading function to accommodate the new parameters, improving the configurability of the estimator. This change aims to enhance the performance and stability of the steering offset estimation process by allowing for more precise parameter tuning.
- fix(steer_offset_estimator): update debug output to use standard deviation
- Modified the debug output format in the SteerOffsetEstimatorNode to replace covariance with standard deviation for clarity.
- This change enhances the readability of the debug information by providing a more intuitive metric for uncertainty.
- refactor(steer_offset_estimator): rename and restructure noise parameters for clarity
- Renamed measurement_noise to measurement_noise_covariance and added process_noise_covariance to the SteerOffsetEstimatorParameters structure for better clarity.
- Updated the parameter loading function to reflect these changes, enhancing the configurability of the estimator.
- Refactored the update logic to utilize the new covariance parameters, improving the accuracy of the steering offset estimation. This commit aims to streamline the parameterization and enhance the performance of the steer offset estimator.
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/steer_offset_estimator.launch.xml
-
- config_file [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset_estimator.param.yaml]
- steer_offset_log_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_log_param_name [default: steer_offset]
- steer_offset_calibration_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_calibration_param_name [default: residual_steering_offset]
Messages
Services
Plugins
Recent questions tagged autoware_steer_offset_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Takayuki Murooka
- Yukinari Hisaki
- Taiki Yamada
- Alqudah Mohammad
Authors
Steer Offset Estimator
Purpose
The role of this node is to automatically estimate the steer_offset used in the lateral controller. The value estimated is the residual bias (on top of the static mechanical bias specified in vehicle calibration files). It also allow for auto or manual calibration of total system bias in real time.
Inner-workings / Algorithms
This module estimates the steering offset using a Kalman Filter algorithm based on vehicle kinematic model constraints.
Kinematic Model
The vehicle kinematic model relates steering angle to angular velocity:
\[\omega = \frac{v}{L} \times \tan(\delta) \approx \frac{v}{L} \times \delta\]Where:
- $\omega$: Angular velocity (yaw rate) [rad/s]
- $v$: Vehicle velocity [m/s]
- $L$: Wheelbase [m]
- $\delta$: Steering angle [rad]
Problem Formulation
Due to mechanical tolerances and sensor calibration errors, there exists a steering offset $\delta_{offset}$. The true relationship becomes:
\[\omega_{observed} = \frac{v}{L} \times (\delta_{measured} + \delta_{offset}) + noise\]The algorithm estimates $\delta_{offset}$ by minimizing the error between observed and predicted angular velocity.
Kalman Filter Algorithm
The Kalman Filter algorithm updates the offset estimate and covariance recursively with time and measurement updates:
-
Regressor and measurement formulation:
\[\phi = \frac{v}{L}\] \[y = \omega_{observed} - \phi \times \delta_{measured}\] -
Time update (process model):
\[P_{prior} = P_{k-1} + Q\] -
Measurement update denominator:
\[denom = R + \phi^2 \times P_{prior}\] -
Kalman gain calculation:
\[K = \frac{P_{prior} \times \phi}{denom}\] -
Innovation (residual) and state update:
\[residual = y - \phi \times \delta_{offset,prev}\] \[\delta_{offset,new} = \delta_{offset,prev} + K \times residual\] -
Covariance update:
\[P_k = P_{prior} - \frac{P_{prior} \times \phi^2 \times P_{prior}}{denom}\]
Where:
- $P$: Estimation covariance matrix (scalar in this 1D case)
- $Q$: Process noise covariance (allows parameter drift)
- $R$: Measurement noise covariance
- $K$: Kalman gain
- $k$: Current time step
Algorithm Constraints
The algorithm only updates when:
- Both pose and steering data are available
- Vehicle velocity >
min_velocity(ensures reliable kinematic model) -
$ \delta_{\text{measured}} $ < max_steer(avoids nonlinear tire behavior)
File truncated at 100 lines see the full file
Changelog for package autoware_steer_offset_estimator
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(steer_offset_estimator): implement new steer offset estimator using kalman filter (#11911)
- refactor(steer_offset_estimator): restructure node and estimator implementation
- Updated the CMakeLists.txt to reflect new library and executable structure.
- Removed outdated README and added a new detailed README.md for better documentation.
- Introduced a new node class for steer offset estimation and refactored the estimator logic.
- Added utility functions for pose and steering calculations.
- Implemented tests for the estimator and utility functions to ensure reliability.
- Updated parameters in the schema and configuration files for improved clarity and functionality.
- Removed deprecated files and images to streamline the package. This commit enhances the overall architecture and usability of the steer offset estimator package.
- refactor(steer_offset_estimator): update CMake configuration and remove deprecated files
- Bump CMake minimum version to 3.14 and adjust project structure in CMakeLists.txt.
- Refactor library and executable definitions for clarity and maintainability.
- Remove the main.cpp file as the node is now defined in a separate header and source file.
- Update parameter comments in the configuration file for better clarity.
- Remove the glog dependency from package.xml to streamline dependencies. This commit enhances the organization and readability of the steer offset estimator package.
- docs(steer_offset_estimator): enhance README formatting for mathematical equations
- Improved the formatting of mathematical equations in the README.md to enhance readability by adding line breaks.
- Removed the monitoring section to streamline the documentation. This update aims to provide clearer guidance on the steering offset estimation algorithm and its implementation details.
- docs(steer_offset_estimator): add debug info output section to README
- docs(steer_offset_estimator): improve formatting of algorithm steps in README
- feat(steer_offset_estimator): enhance estimator parameters and update calculations
- Added new parameters: measurement_noise, denominator_floor, and covariance_floor to improve estimation stability.
- Refactored the update logic to incorporate Kalman gain and residual calculations, enhancing the accuracy of the steering offset estimation.
- Updated debug output to reflect new calculation metrics, including kalman_gain and residual. This commit improves the robustness and performance of the steer offset estimator by refining its parameterization and calculation methods.
- feat(steer_offset_estimator): add new parameters for enhanced estimation
- Introduced measurement_noise, denominator_floor, and covariance_floor parameters to the SteerOffsetEstimatorParameters structure.
- Updated the parameter loading function to accommodate the new parameters, improving the configurability of the estimator. This change aims to enhance the performance and stability of the steering offset estimation process by allowing for more precise parameter tuning.
- fix(steer_offset_estimator): update debug output to use standard deviation
- Modified the debug output format in the SteerOffsetEstimatorNode to replace covariance with standard deviation for clarity.
- This change enhances the readability of the debug information by providing a more intuitive metric for uncertainty.
- refactor(steer_offset_estimator): rename and restructure noise parameters for clarity
- Renamed measurement_noise to measurement_noise_covariance and added process_noise_covariance to the SteerOffsetEstimatorParameters structure for better clarity.
- Updated the parameter loading function to reflect these changes, enhancing the configurability of the estimator.
- Refactored the update logic to utilize the new covariance parameters, improving the accuracy of the steering offset estimation. This commit aims to streamline the parameterization and enhance the performance of the steer offset estimator.
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/steer_offset_estimator.launch.xml
-
- config_file [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset_estimator.param.yaml]
- steer_offset_log_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_log_param_name [default: steer_offset]
- steer_offset_calibration_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_calibration_param_name [default: residual_steering_offset]
Messages
Services
Plugins
Recent questions tagged autoware_steer_offset_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Takayuki Murooka
- Yukinari Hisaki
- Taiki Yamada
- Alqudah Mohammad
Authors
Steer Offset Estimator
Purpose
The role of this node is to automatically estimate the steer_offset used in the lateral controller. The value estimated is the residual bias (on top of the static mechanical bias specified in vehicle calibration files). It also allow for auto or manual calibration of total system bias in real time.
Inner-workings / Algorithms
This module estimates the steering offset using a Kalman Filter algorithm based on vehicle kinematic model constraints.
Kinematic Model
The vehicle kinematic model relates steering angle to angular velocity:
\[\omega = \frac{v}{L} \times \tan(\delta) \approx \frac{v}{L} \times \delta\]Where:
- $\omega$: Angular velocity (yaw rate) [rad/s]
- $v$: Vehicle velocity [m/s]
- $L$: Wheelbase [m]
- $\delta$: Steering angle [rad]
Problem Formulation
Due to mechanical tolerances and sensor calibration errors, there exists a steering offset $\delta_{offset}$. The true relationship becomes:
\[\omega_{observed} = \frac{v}{L} \times (\delta_{measured} + \delta_{offset}) + noise\]The algorithm estimates $\delta_{offset}$ by minimizing the error between observed and predicted angular velocity.
Kalman Filter Algorithm
The Kalman Filter algorithm updates the offset estimate and covariance recursively with time and measurement updates:
-
Regressor and measurement formulation:
\[\phi = \frac{v}{L}\] \[y = \omega_{observed} - \phi \times \delta_{measured}\] -
Time update (process model):
\[P_{prior} = P_{k-1} + Q\] -
Measurement update denominator:
\[denom = R + \phi^2 \times P_{prior}\] -
Kalman gain calculation:
\[K = \frac{P_{prior} \times \phi}{denom}\] -
Innovation (residual) and state update:
\[residual = y - \phi \times \delta_{offset,prev}\] \[\delta_{offset,new} = \delta_{offset,prev} + K \times residual\] -
Covariance update:
\[P_k = P_{prior} - \frac{P_{prior} \times \phi^2 \times P_{prior}}{denom}\]
Where:
- $P$: Estimation covariance matrix (scalar in this 1D case)
- $Q$: Process noise covariance (allows parameter drift)
- $R$: Measurement noise covariance
- $K$: Kalman gain
- $k$: Current time step
Algorithm Constraints
The algorithm only updates when:
- Both pose and steering data are available
- Vehicle velocity >
min_velocity(ensures reliable kinematic model) -
$ \delta_{\text{measured}} $ < max_steer(avoids nonlinear tire behavior)
File truncated at 100 lines see the full file
Changelog for package autoware_steer_offset_estimator
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(steer_offset_estimator): implement new steer offset estimator using kalman filter (#11911)
- refactor(steer_offset_estimator): restructure node and estimator implementation
- Updated the CMakeLists.txt to reflect new library and executable structure.
- Removed outdated README and added a new detailed README.md for better documentation.
- Introduced a new node class for steer offset estimation and refactored the estimator logic.
- Added utility functions for pose and steering calculations.
- Implemented tests for the estimator and utility functions to ensure reliability.
- Updated parameters in the schema and configuration files for improved clarity and functionality.
- Removed deprecated files and images to streamline the package. This commit enhances the overall architecture and usability of the steer offset estimator package.
- refactor(steer_offset_estimator): update CMake configuration and remove deprecated files
- Bump CMake minimum version to 3.14 and adjust project structure in CMakeLists.txt.
- Refactor library and executable definitions for clarity and maintainability.
- Remove the main.cpp file as the node is now defined in a separate header and source file.
- Update parameter comments in the configuration file for better clarity.
- Remove the glog dependency from package.xml to streamline dependencies. This commit enhances the organization and readability of the steer offset estimator package.
- docs(steer_offset_estimator): enhance README formatting for mathematical equations
- Improved the formatting of mathematical equations in the README.md to enhance readability by adding line breaks.
- Removed the monitoring section to streamline the documentation. This update aims to provide clearer guidance on the steering offset estimation algorithm and its implementation details.
- docs(steer_offset_estimator): add debug info output section to README
- docs(steer_offset_estimator): improve formatting of algorithm steps in README
- feat(steer_offset_estimator): enhance estimator parameters and update calculations
- Added new parameters: measurement_noise, denominator_floor, and covariance_floor to improve estimation stability.
- Refactored the update logic to incorporate Kalman gain and residual calculations, enhancing the accuracy of the steering offset estimation.
- Updated debug output to reflect new calculation metrics, including kalman_gain and residual. This commit improves the robustness and performance of the steer offset estimator by refining its parameterization and calculation methods.
- feat(steer_offset_estimator): add new parameters for enhanced estimation
- Introduced measurement_noise, denominator_floor, and covariance_floor parameters to the SteerOffsetEstimatorParameters structure.
- Updated the parameter loading function to accommodate the new parameters, improving the configurability of the estimator. This change aims to enhance the performance and stability of the steering offset estimation process by allowing for more precise parameter tuning.
- fix(steer_offset_estimator): update debug output to use standard deviation
- Modified the debug output format in the SteerOffsetEstimatorNode to replace covariance with standard deviation for clarity.
- This change enhances the readability of the debug information by providing a more intuitive metric for uncertainty.
- refactor(steer_offset_estimator): rename and restructure noise parameters for clarity
- Renamed measurement_noise to measurement_noise_covariance and added process_noise_covariance to the SteerOffsetEstimatorParameters structure for better clarity.
- Updated the parameter loading function to reflect these changes, enhancing the configurability of the estimator.
- Refactored the update logic to utilize the new covariance parameters, improving the accuracy of the steering offset estimation. This commit aims to streamline the parameterization and enhance the performance of the steer offset estimator.
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/steer_offset_estimator.launch.xml
-
- config_file [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset_estimator.param.yaml]
- steer_offset_log_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_log_param_name [default: steer_offset]
- steer_offset_calibration_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_calibration_param_name [default: residual_steering_offset]
Messages
Services
Plugins
Recent questions tagged autoware_steer_offset_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Takayuki Murooka
- Yukinari Hisaki
- Taiki Yamada
- Alqudah Mohammad
Authors
Steer Offset Estimator
Purpose
The role of this node is to automatically estimate the steer_offset used in the lateral controller. The value estimated is the residual bias (on top of the static mechanical bias specified in vehicle calibration files). It also allow for auto or manual calibration of total system bias in real time.
Inner-workings / Algorithms
This module estimates the steering offset using a Kalman Filter algorithm based on vehicle kinematic model constraints.
Kinematic Model
The vehicle kinematic model relates steering angle to angular velocity:
\[\omega = \frac{v}{L} \times \tan(\delta) \approx \frac{v}{L} \times \delta\]Where:
- $\omega$: Angular velocity (yaw rate) [rad/s]
- $v$: Vehicle velocity [m/s]
- $L$: Wheelbase [m]
- $\delta$: Steering angle [rad]
Problem Formulation
Due to mechanical tolerances and sensor calibration errors, there exists a steering offset $\delta_{offset}$. The true relationship becomes:
\[\omega_{observed} = \frac{v}{L} \times (\delta_{measured} + \delta_{offset}) + noise\]The algorithm estimates $\delta_{offset}$ by minimizing the error between observed and predicted angular velocity.
Kalman Filter Algorithm
The Kalman Filter algorithm updates the offset estimate and covariance recursively with time and measurement updates:
-
Regressor and measurement formulation:
\[\phi = \frac{v}{L}\] \[y = \omega_{observed} - \phi \times \delta_{measured}\] -
Time update (process model):
\[P_{prior} = P_{k-1} + Q\] -
Measurement update denominator:
\[denom = R + \phi^2 \times P_{prior}\] -
Kalman gain calculation:
\[K = \frac{P_{prior} \times \phi}{denom}\] -
Innovation (residual) and state update:
\[residual = y - \phi \times \delta_{offset,prev}\] \[\delta_{offset,new} = \delta_{offset,prev} + K \times residual\] -
Covariance update:
\[P_k = P_{prior} - \frac{P_{prior} \times \phi^2 \times P_{prior}}{denom}\]
Where:
- $P$: Estimation covariance matrix (scalar in this 1D case)
- $Q$: Process noise covariance (allows parameter drift)
- $R$: Measurement noise covariance
- $K$: Kalman gain
- $k$: Current time step
Algorithm Constraints
The algorithm only updates when:
- Both pose and steering data are available
- Vehicle velocity >
min_velocity(ensures reliable kinematic model) -
$ \delta_{\text{measured}} $ < max_steer(avoids nonlinear tire behavior)
File truncated at 100 lines see the full file
Changelog for package autoware_steer_offset_estimator
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(steer_offset_estimator): implement new steer offset estimator using kalman filter (#11911)
- refactor(steer_offset_estimator): restructure node and estimator implementation
- Updated the CMakeLists.txt to reflect new library and executable structure.
- Removed outdated README and added a new detailed README.md for better documentation.
- Introduced a new node class for steer offset estimation and refactored the estimator logic.
- Added utility functions for pose and steering calculations.
- Implemented tests for the estimator and utility functions to ensure reliability.
- Updated parameters in the schema and configuration files for improved clarity and functionality.
- Removed deprecated files and images to streamline the package. This commit enhances the overall architecture and usability of the steer offset estimator package.
- refactor(steer_offset_estimator): update CMake configuration and remove deprecated files
- Bump CMake minimum version to 3.14 and adjust project structure in CMakeLists.txt.
- Refactor library and executable definitions for clarity and maintainability.
- Remove the main.cpp file as the node is now defined in a separate header and source file.
- Update parameter comments in the configuration file for better clarity.
- Remove the glog dependency from package.xml to streamline dependencies. This commit enhances the organization and readability of the steer offset estimator package.
- docs(steer_offset_estimator): enhance README formatting for mathematical equations
- Improved the formatting of mathematical equations in the README.md to enhance readability by adding line breaks.
- Removed the monitoring section to streamline the documentation. This update aims to provide clearer guidance on the steering offset estimation algorithm and its implementation details.
- docs(steer_offset_estimator): add debug info output section to README
- docs(steer_offset_estimator): improve formatting of algorithm steps in README
- feat(steer_offset_estimator): enhance estimator parameters and update calculations
- Added new parameters: measurement_noise, denominator_floor, and covariance_floor to improve estimation stability.
- Refactored the update logic to incorporate Kalman gain and residual calculations, enhancing the accuracy of the steering offset estimation.
- Updated debug output to reflect new calculation metrics, including kalman_gain and residual. This commit improves the robustness and performance of the steer offset estimator by refining its parameterization and calculation methods.
- feat(steer_offset_estimator): add new parameters for enhanced estimation
- Introduced measurement_noise, denominator_floor, and covariance_floor parameters to the SteerOffsetEstimatorParameters structure.
- Updated the parameter loading function to accommodate the new parameters, improving the configurability of the estimator. This change aims to enhance the performance and stability of the steering offset estimation process by allowing for more precise parameter tuning.
- fix(steer_offset_estimator): update debug output to use standard deviation
- Modified the debug output format in the SteerOffsetEstimatorNode to replace covariance with standard deviation for clarity.
- This change enhances the readability of the debug information by providing a more intuitive metric for uncertainty.
- refactor(steer_offset_estimator): rename and restructure noise parameters for clarity
- Renamed measurement_noise to measurement_noise_covariance and added process_noise_covariance to the SteerOffsetEstimatorParameters structure for better clarity.
- Updated the parameter loading function to reflect these changes, enhancing the configurability of the estimator.
- Refactored the update logic to utilize the new covariance parameters, improving the accuracy of the steering offset estimation. This commit aims to streamline the parameterization and enhance the performance of the steer offset estimator.
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/steer_offset_estimator.launch.xml
-
- config_file [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset_estimator.param.yaml]
- steer_offset_log_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_log_param_name [default: steer_offset]
- steer_offset_calibration_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_calibration_param_name [default: residual_steering_offset]
Messages
Services
Plugins
Recent questions tagged autoware_steer_offset_estimator at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Taiki Tanaka
- Takayuki Murooka
- Yukinari Hisaki
- Taiki Yamada
- Alqudah Mohammad
Authors
Steer Offset Estimator
Purpose
The role of this node is to automatically estimate the steer_offset used in the lateral controller. The value estimated is the residual bias (on top of the static mechanical bias specified in vehicle calibration files). It also allow for auto or manual calibration of total system bias in real time.
Inner-workings / Algorithms
This module estimates the steering offset using a Kalman Filter algorithm based on vehicle kinematic model constraints.
Kinematic Model
The vehicle kinematic model relates steering angle to angular velocity:
\[\omega = \frac{v}{L} \times \tan(\delta) \approx \frac{v}{L} \times \delta\]Where:
- $\omega$: Angular velocity (yaw rate) [rad/s]
- $v$: Vehicle velocity [m/s]
- $L$: Wheelbase [m]
- $\delta$: Steering angle [rad]
Problem Formulation
Due to mechanical tolerances and sensor calibration errors, there exists a steering offset $\delta_{offset}$. The true relationship becomes:
\[\omega_{observed} = \frac{v}{L} \times (\delta_{measured} + \delta_{offset}) + noise\]The algorithm estimates $\delta_{offset}$ by minimizing the error between observed and predicted angular velocity.
Kalman Filter Algorithm
The Kalman Filter algorithm updates the offset estimate and covariance recursively with time and measurement updates:
-
Regressor and measurement formulation:
\[\phi = \frac{v}{L}\] \[y = \omega_{observed} - \phi \times \delta_{measured}\] -
Time update (process model):
\[P_{prior} = P_{k-1} + Q\] -
Measurement update denominator:
\[denom = R + \phi^2 \times P_{prior}\] -
Kalman gain calculation:
\[K = \frac{P_{prior} \times \phi}{denom}\] -
Innovation (residual) and state update:
\[residual = y - \phi \times \delta_{offset,prev}\] \[\delta_{offset,new} = \delta_{offset,prev} + K \times residual\] -
Covariance update:
\[P_k = P_{prior} - \frac{P_{prior} \times \phi^2 \times P_{prior}}{denom}\]
Where:
- $P$: Estimation covariance matrix (scalar in this 1D case)
- $Q$: Process noise covariance (allows parameter drift)
- $R$: Measurement noise covariance
- $K$: Kalman gain
- $k$: Current time step
Algorithm Constraints
The algorithm only updates when:
- Both pose and steering data are available
- Vehicle velocity >
min_velocity(ensures reliable kinematic model) -
$ \delta_{\text{measured}} $ < max_steer(avoids nonlinear tire behavior)
File truncated at 100 lines see the full file
Changelog for package autoware_steer_offset_estimator
0.50.0 (2026-02-14)
-
Merge remote-tracking branch 'origin/main' into humble
-
feat(steer_offset_estimator): implement new steer offset estimator using kalman filter (#11911)
- refactor(steer_offset_estimator): restructure node and estimator implementation
- Updated the CMakeLists.txt to reflect new library and executable structure.
- Removed outdated README and added a new detailed README.md for better documentation.
- Introduced a new node class for steer offset estimation and refactored the estimator logic.
- Added utility functions for pose and steering calculations.
- Implemented tests for the estimator and utility functions to ensure reliability.
- Updated parameters in the schema and configuration files for improved clarity and functionality.
- Removed deprecated files and images to streamline the package. This commit enhances the overall architecture and usability of the steer offset estimator package.
- refactor(steer_offset_estimator): update CMake configuration and remove deprecated files
- Bump CMake minimum version to 3.14 and adjust project structure in CMakeLists.txt.
- Refactor library and executable definitions for clarity and maintainability.
- Remove the main.cpp file as the node is now defined in a separate header and source file.
- Update parameter comments in the configuration file for better clarity.
- Remove the glog dependency from package.xml to streamline dependencies. This commit enhances the organization and readability of the steer offset estimator package.
- docs(steer_offset_estimator): enhance README formatting for mathematical equations
- Improved the formatting of mathematical equations in the README.md to enhance readability by adding line breaks.
- Removed the monitoring section to streamline the documentation. This update aims to provide clearer guidance on the steering offset estimation algorithm and its implementation details.
- docs(steer_offset_estimator): add debug info output section to README
- docs(steer_offset_estimator): improve formatting of algorithm steps in README
- feat(steer_offset_estimator): enhance estimator parameters and update calculations
- Added new parameters: measurement_noise, denominator_floor, and covariance_floor to improve estimation stability.
- Refactored the update logic to incorporate Kalman gain and residual calculations, enhancing the accuracy of the steering offset estimation.
- Updated debug output to reflect new calculation metrics, including kalman_gain and residual. This commit improves the robustness and performance of the steer offset estimator by refining its parameterization and calculation methods.
- feat(steer_offset_estimator): add new parameters for enhanced estimation
- Introduced measurement_noise, denominator_floor, and covariance_floor parameters to the SteerOffsetEstimatorParameters structure.
- Updated the parameter loading function to accommodate the new parameters, improving the configurability of the estimator. This change aims to enhance the performance and stability of the steering offset estimation process by allowing for more precise parameter tuning.
- fix(steer_offset_estimator): update debug output to use standard deviation
- Modified the debug output format in the SteerOffsetEstimatorNode to replace covariance with standard deviation for clarity.
- This change enhances the readability of the debug information by providing a more intuitive metric for uncertainty.
- refactor(steer_offset_estimator): rename and restructure noise parameters for clarity
- Renamed measurement_noise to measurement_noise_covariance and added process_noise_covariance to the SteerOffsetEstimatorParameters structure for better clarity.
- Updated the parameter loading function to reflect these changes, enhancing the configurability of the estimator.
- Refactored the update logic to utilize the new covariance parameters, improving the accuracy of the steering offset estimation. This commit aims to streamline the parameterization and enhance the performance of the steer offset estimator.
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
| Name |
|---|
| fmt |
Dependant Packages
Launch files
- launch/steer_offset_estimator.launch.xml
-
- config_file [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset_estimator.param.yaml]
- steer_offset_log_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_log_param_name [default: steer_offset]
- steer_offset_calibration_file_path [default: $(find-pkg-share autoware_steer_offset_estimator)/config/steer_offset.param.yaml]
- steer_offset_calibration_param_name [default: residual_steering_offset]