
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hiroki OTA
- Takagi, Isamu
- Khalil Selyan
- Ryohsuke Mitsudome
- Junya Sasaki
Authors
tier4_state_rviz_plugin
Purpose
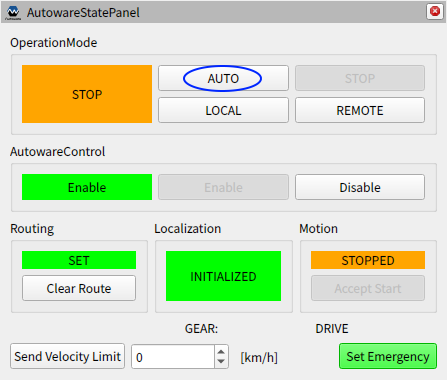
This plugin displays the current status of autoware. This plugin also can engage from the panel.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/api/localization/initialization_state |
autoware_adapi_v1_msgs::msg::LocalizationInitializationState |
The topic represents the state of localization initialization |
/api/motion/state |
autoware_adapi_v1_msgs::msg::MotionState |
The topic represents the state of motion |
/api/autoware/get/emergency |
tier4_external_api_msgs::msg::Emergency |
The topic represents the state of external emergency |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The topic represents the state of gear |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/operation_mode/change_to_local |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to local |
/api/operation_mode/change_to_remote |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to remote |
/api/operation_mode/enable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to enable vehicle control by Autoware |
/api/operation_mode/disable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to disable vehicle control by Autoware |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/api/motion/accept_start |
autoware_adapi_v1_msgs::srv::AcceptStart |
The service to accept the vehicle to start |
/api/autoware/set/emergency |
tier4_external_api_msgs::srv::SetEmergency |
The service to set external emergency |
/planning/scenario_planning/max_velocity_candidates |
autoware_internal_planning_msgs::msg::VelocityLimit |
The topic to set maximum speed of the vehicle |
HowToUse
-
Start rviz and select panels/Add new panel.

-
Select tier4_state_rviz_plugin/AutowareStatePanel and press OK.

-
If the auto button is activated, can engage by clicking it.
Changelog for package tier4_state_rviz_plugin
0.50.0 (2026-02-14)
0.49.0 (2025-12-30)
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- chore(tier4_state_rviz_plugin): change ClearRoute button activation rule (#11598) feat(autoware_state_panel): allow route button activation for ARRIVED state
- Contributors: Autumn60, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
-
feat(tier4_state_rviz_plugin): save & load config of VelocitySteeringFactorsPanel (#10026) save & load rviz config
-
feat(tier4_state_rviz_plugin): use mrm description api (#10895)
- feat(tier4_state_rviz_plugin): use mrm description api
* fix timer cancel timing ---------
-
chore(tier4_state_rviz_plugin): add maintainer (#10905)
-
feat(tier4_state_rviz_plugin): display unknown value (#10861)
-
Contributors: Mitsuhiro Sakamoto, Takagi, Isamu
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- feat!: replace VelocityLimit messages with autoware_internal_planning_msgs (#10273)
- Contributors: Hayato Mizushima, Ryohsuke Mitsudome, Yutaka Kondo
0.42.0 (2025-03-03)
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- fix(tier4_state_rviz_plugin): fix bugprone-integer-division (#9628) fix: bugprone-integer-division
- Contributors: Fumiya Watanabe, kobayu858
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_state_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hiroki OTA
- Takagi, Isamu
- Khalil Selyan
- Ryohsuke Mitsudome
- Junya Sasaki
Authors
tier4_state_rviz_plugin
Purpose
This plugin displays the current status of autoware. This plugin also can engage from the panel.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/api/localization/initialization_state |
autoware_adapi_v1_msgs::msg::LocalizationInitializationState |
The topic represents the state of localization initialization |
/api/motion/state |
autoware_adapi_v1_msgs::msg::MotionState |
The topic represents the state of motion |
/api/autoware/get/emergency |
tier4_external_api_msgs::msg::Emergency |
The topic represents the state of external emergency |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The topic represents the state of gear |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/operation_mode/change_to_local |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to local |
/api/operation_mode/change_to_remote |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to remote |
/api/operation_mode/enable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to enable vehicle control by Autoware |
/api/operation_mode/disable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to disable vehicle control by Autoware |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/api/motion/accept_start |
autoware_adapi_v1_msgs::srv::AcceptStart |
The service to accept the vehicle to start |
/api/autoware/set/emergency |
tier4_external_api_msgs::srv::SetEmergency |
The service to set external emergency |
/planning/scenario_planning/max_velocity_candidates |
autoware_internal_planning_msgs::msg::VelocityLimit |
The topic to set maximum speed of the vehicle |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select tier4_state_rviz_plugin/AutowareStatePanel and press OK.
-
If the auto button is activated, can engage by clicking it.
Changelog for package tier4_state_rviz_plugin
0.50.0 (2026-02-14)
0.49.0 (2025-12-30)
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- chore(tier4_state_rviz_plugin): change ClearRoute button activation rule (#11598) feat(autoware_state_panel): allow route button activation for ARRIVED state
- Contributors: Autumn60, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
-
feat(tier4_state_rviz_plugin): save & load config of VelocitySteeringFactorsPanel (#10026) save & load rviz config
-
feat(tier4_state_rviz_plugin): use mrm description api (#10895)
- feat(tier4_state_rviz_plugin): use mrm description api
* fix timer cancel timing ---------
-
chore(tier4_state_rviz_plugin): add maintainer (#10905)
-
feat(tier4_state_rviz_plugin): display unknown value (#10861)
-
Contributors: Mitsuhiro Sakamoto, Takagi, Isamu
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- feat!: replace VelocityLimit messages with autoware_internal_planning_msgs (#10273)
- Contributors: Hayato Mizushima, Ryohsuke Mitsudome, Yutaka Kondo
0.42.0 (2025-03-03)
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- fix(tier4_state_rviz_plugin): fix bugprone-integer-division (#9628) fix: bugprone-integer-division
- Contributors: Fumiya Watanabe, kobayu858
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_state_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hiroki OTA
- Takagi, Isamu
- Khalil Selyan
- Ryohsuke Mitsudome
- Junya Sasaki
Authors
tier4_state_rviz_plugin
Purpose
This plugin displays the current status of autoware. This plugin also can engage from the panel.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/api/localization/initialization_state |
autoware_adapi_v1_msgs::msg::LocalizationInitializationState |
The topic represents the state of localization initialization |
/api/motion/state |
autoware_adapi_v1_msgs::msg::MotionState |
The topic represents the state of motion |
/api/autoware/get/emergency |
tier4_external_api_msgs::msg::Emergency |
The topic represents the state of external emergency |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The topic represents the state of gear |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/operation_mode/change_to_local |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to local |
/api/operation_mode/change_to_remote |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to remote |
/api/operation_mode/enable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to enable vehicle control by Autoware |
/api/operation_mode/disable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to disable vehicle control by Autoware |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/api/motion/accept_start |
autoware_adapi_v1_msgs::srv::AcceptStart |
The service to accept the vehicle to start |
/api/autoware/set/emergency |
tier4_external_api_msgs::srv::SetEmergency |
The service to set external emergency |
/planning/scenario_planning/max_velocity_candidates |
autoware_internal_planning_msgs::msg::VelocityLimit |
The topic to set maximum speed of the vehicle |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select tier4_state_rviz_plugin/AutowareStatePanel and press OK.
-
If the auto button is activated, can engage by clicking it.
Changelog for package tier4_state_rviz_plugin
0.50.0 (2026-02-14)
0.49.0 (2025-12-30)
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- chore(tier4_state_rviz_plugin): change ClearRoute button activation rule (#11598) feat(autoware_state_panel): allow route button activation for ARRIVED state
- Contributors: Autumn60, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
-
feat(tier4_state_rviz_plugin): save & load config of VelocitySteeringFactorsPanel (#10026) save & load rviz config
-
feat(tier4_state_rviz_plugin): use mrm description api (#10895)
- feat(tier4_state_rviz_plugin): use mrm description api
* fix timer cancel timing ---------
-
chore(tier4_state_rviz_plugin): add maintainer (#10905)
-
feat(tier4_state_rviz_plugin): display unknown value (#10861)
-
Contributors: Mitsuhiro Sakamoto, Takagi, Isamu
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- feat!: replace VelocityLimit messages with autoware_internal_planning_msgs (#10273)
- Contributors: Hayato Mizushima, Ryohsuke Mitsudome, Yutaka Kondo
0.42.0 (2025-03-03)
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- fix(tier4_state_rviz_plugin): fix bugprone-integer-division (#9628) fix: bugprone-integer-division
- Contributors: Fumiya Watanabe, kobayu858
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_state_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hiroki OTA
- Takagi, Isamu
- Khalil Selyan
- Ryohsuke Mitsudome
- Junya Sasaki
Authors
tier4_state_rviz_plugin
Purpose
This plugin displays the current status of autoware. This plugin also can engage from the panel.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/api/localization/initialization_state |
autoware_adapi_v1_msgs::msg::LocalizationInitializationState |
The topic represents the state of localization initialization |
/api/motion/state |
autoware_adapi_v1_msgs::msg::MotionState |
The topic represents the state of motion |
/api/autoware/get/emergency |
tier4_external_api_msgs::msg::Emergency |
The topic represents the state of external emergency |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The topic represents the state of gear |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/operation_mode/change_to_local |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to local |
/api/operation_mode/change_to_remote |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to remote |
/api/operation_mode/enable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to enable vehicle control by Autoware |
/api/operation_mode/disable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to disable vehicle control by Autoware |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/api/motion/accept_start |
autoware_adapi_v1_msgs::srv::AcceptStart |
The service to accept the vehicle to start |
/api/autoware/set/emergency |
tier4_external_api_msgs::srv::SetEmergency |
The service to set external emergency |
/planning/scenario_planning/max_velocity_candidates |
autoware_internal_planning_msgs::msg::VelocityLimit |
The topic to set maximum speed of the vehicle |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select tier4_state_rviz_plugin/AutowareStatePanel and press OK.
-
If the auto button is activated, can engage by clicking it.
Changelog for package tier4_state_rviz_plugin
0.50.0 (2026-02-14)
0.49.0 (2025-12-30)
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- chore(tier4_state_rviz_plugin): change ClearRoute button activation rule (#11598) feat(autoware_state_panel): allow route button activation for ARRIVED state
- Contributors: Autumn60, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
-
feat(tier4_state_rviz_plugin): save & load config of VelocitySteeringFactorsPanel (#10026) save & load rviz config
-
feat(tier4_state_rviz_plugin): use mrm description api (#10895)
- feat(tier4_state_rviz_plugin): use mrm description api
* fix timer cancel timing ---------
-
chore(tier4_state_rviz_plugin): add maintainer (#10905)
-
feat(tier4_state_rviz_plugin): display unknown value (#10861)
-
Contributors: Mitsuhiro Sakamoto, Takagi, Isamu
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- feat!: replace VelocityLimit messages with autoware_internal_planning_msgs (#10273)
- Contributors: Hayato Mizushima, Ryohsuke Mitsudome, Yutaka Kondo
0.42.0 (2025-03-03)
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- fix(tier4_state_rviz_plugin): fix bugprone-integer-division (#9628) fix: bugprone-integer-division
- Contributors: Fumiya Watanabe, kobayu858
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_state_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hiroki OTA
- Takagi, Isamu
- Khalil Selyan
- Ryohsuke Mitsudome
- Junya Sasaki
Authors
tier4_state_rviz_plugin
Purpose
This plugin displays the current status of autoware. This plugin also can engage from the panel.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/api/localization/initialization_state |
autoware_adapi_v1_msgs::msg::LocalizationInitializationState |
The topic represents the state of localization initialization |
/api/motion/state |
autoware_adapi_v1_msgs::msg::MotionState |
The topic represents the state of motion |
/api/autoware/get/emergency |
tier4_external_api_msgs::msg::Emergency |
The topic represents the state of external emergency |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The topic represents the state of gear |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/operation_mode/change_to_local |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to local |
/api/operation_mode/change_to_remote |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to remote |
/api/operation_mode/enable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to enable vehicle control by Autoware |
/api/operation_mode/disable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to disable vehicle control by Autoware |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/api/motion/accept_start |
autoware_adapi_v1_msgs::srv::AcceptStart |
The service to accept the vehicle to start |
/api/autoware/set/emergency |
tier4_external_api_msgs::srv::SetEmergency |
The service to set external emergency |
/planning/scenario_planning/max_velocity_candidates |
autoware_internal_planning_msgs::msg::VelocityLimit |
The topic to set maximum speed of the vehicle |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select tier4_state_rviz_plugin/AutowareStatePanel and press OK.
-
If the auto button is activated, can engage by clicking it.
Changelog for package tier4_state_rviz_plugin
0.50.0 (2026-02-14)
0.49.0 (2025-12-30)
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- chore(tier4_state_rviz_plugin): change ClearRoute button activation rule (#11598) feat(autoware_state_panel): allow route button activation for ARRIVED state
- Contributors: Autumn60, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
-
feat(tier4_state_rviz_plugin): save & load config of VelocitySteeringFactorsPanel (#10026) save & load rviz config
-
feat(tier4_state_rviz_plugin): use mrm description api (#10895)
- feat(tier4_state_rviz_plugin): use mrm description api
* fix timer cancel timing ---------
-
chore(tier4_state_rviz_plugin): add maintainer (#10905)
-
feat(tier4_state_rviz_plugin): display unknown value (#10861)
-
Contributors: Mitsuhiro Sakamoto, Takagi, Isamu
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- feat!: replace VelocityLimit messages with autoware_internal_planning_msgs (#10273)
- Contributors: Hayato Mizushima, Ryohsuke Mitsudome, Yutaka Kondo
0.42.0 (2025-03-03)
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- fix(tier4_state_rviz_plugin): fix bugprone-integer-division (#9628) fix: bugprone-integer-division
- Contributors: Fumiya Watanabe, kobayu858
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_state_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hiroki OTA
- Takagi, Isamu
- Khalil Selyan
- Ryohsuke Mitsudome
- Junya Sasaki
Authors
tier4_state_rviz_plugin
Purpose
This plugin displays the current status of autoware. This plugin also can engage from the panel.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/api/localization/initialization_state |
autoware_adapi_v1_msgs::msg::LocalizationInitializationState |
The topic represents the state of localization initialization |
/api/motion/state |
autoware_adapi_v1_msgs::msg::MotionState |
The topic represents the state of motion |
/api/autoware/get/emergency |
tier4_external_api_msgs::msg::Emergency |
The topic represents the state of external emergency |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The topic represents the state of gear |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/operation_mode/change_to_local |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to local |
/api/operation_mode/change_to_remote |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to remote |
/api/operation_mode/enable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to enable vehicle control by Autoware |
/api/operation_mode/disable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to disable vehicle control by Autoware |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/api/motion/accept_start |
autoware_adapi_v1_msgs::srv::AcceptStart |
The service to accept the vehicle to start |
/api/autoware/set/emergency |
tier4_external_api_msgs::srv::SetEmergency |
The service to set external emergency |
/planning/scenario_planning/max_velocity_candidates |
autoware_internal_planning_msgs::msg::VelocityLimit |
The topic to set maximum speed of the vehicle |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select tier4_state_rviz_plugin/AutowareStatePanel and press OK.
-
If the auto button is activated, can engage by clicking it.
Changelog for package tier4_state_rviz_plugin
0.50.0 (2026-02-14)
0.49.0 (2025-12-30)
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- chore(tier4_state_rviz_plugin): change ClearRoute button activation rule (#11598) feat(autoware_state_panel): allow route button activation for ARRIVED state
- Contributors: Autumn60, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
-
feat(tier4_state_rviz_plugin): save & load config of VelocitySteeringFactorsPanel (#10026) save & load rviz config
-
feat(tier4_state_rviz_plugin): use mrm description api (#10895)
- feat(tier4_state_rviz_plugin): use mrm description api
* fix timer cancel timing ---------
-
chore(tier4_state_rviz_plugin): add maintainer (#10905)
-
feat(tier4_state_rviz_plugin): display unknown value (#10861)
-
Contributors: Mitsuhiro Sakamoto, Takagi, Isamu
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- feat!: replace VelocityLimit messages with autoware_internal_planning_msgs (#10273)
- Contributors: Hayato Mizushima, Ryohsuke Mitsudome, Yutaka Kondo
0.42.0 (2025-03-03)
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- fix(tier4_state_rviz_plugin): fix bugprone-integer-division (#9628) fix: bugprone-integer-division
- Contributors: Fumiya Watanabe, kobayu858
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_state_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hiroki OTA
- Takagi, Isamu
- Khalil Selyan
- Ryohsuke Mitsudome
- Junya Sasaki
Authors
tier4_state_rviz_plugin
Purpose
This plugin displays the current status of autoware. This plugin also can engage from the panel.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/api/localization/initialization_state |
autoware_adapi_v1_msgs::msg::LocalizationInitializationState |
The topic represents the state of localization initialization |
/api/motion/state |
autoware_adapi_v1_msgs::msg::MotionState |
The topic represents the state of motion |
/api/autoware/get/emergency |
tier4_external_api_msgs::msg::Emergency |
The topic represents the state of external emergency |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The topic represents the state of gear |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/operation_mode/change_to_local |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to local |
/api/operation_mode/change_to_remote |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to remote |
/api/operation_mode/enable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to enable vehicle control by Autoware |
/api/operation_mode/disable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to disable vehicle control by Autoware |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/api/motion/accept_start |
autoware_adapi_v1_msgs::srv::AcceptStart |
The service to accept the vehicle to start |
/api/autoware/set/emergency |
tier4_external_api_msgs::srv::SetEmergency |
The service to set external emergency |
/planning/scenario_planning/max_velocity_candidates |
autoware_internal_planning_msgs::msg::VelocityLimit |
The topic to set maximum speed of the vehicle |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select tier4_state_rviz_plugin/AutowareStatePanel and press OK.
-
If the auto button is activated, can engage by clicking it.
Changelog for package tier4_state_rviz_plugin
0.50.0 (2026-02-14)
0.49.0 (2025-12-30)
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- chore(tier4_state_rviz_plugin): change ClearRoute button activation rule (#11598) feat(autoware_state_panel): allow route button activation for ARRIVED state
- Contributors: Autumn60, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
-
feat(tier4_state_rviz_plugin): save & load config of VelocitySteeringFactorsPanel (#10026) save & load rviz config
-
feat(tier4_state_rviz_plugin): use mrm description api (#10895)
- feat(tier4_state_rviz_plugin): use mrm description api
* fix timer cancel timing ---------
-
chore(tier4_state_rviz_plugin): add maintainer (#10905)
-
feat(tier4_state_rviz_plugin): display unknown value (#10861)
-
Contributors: Mitsuhiro Sakamoto, Takagi, Isamu
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- feat!: replace VelocityLimit messages with autoware_internal_planning_msgs (#10273)
- Contributors: Hayato Mizushima, Ryohsuke Mitsudome, Yutaka Kondo
0.42.0 (2025-03-03)
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- fix(tier4_state_rviz_plugin): fix bugprone-integer-division (#9628) fix: bugprone-integer-division
- Contributors: Fumiya Watanabe, kobayu858
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_state_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hiroki OTA
- Takagi, Isamu
- Khalil Selyan
- Ryohsuke Mitsudome
- Junya Sasaki
Authors
tier4_state_rviz_plugin
Purpose
This plugin displays the current status of autoware. This plugin also can engage from the panel.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/api/localization/initialization_state |
autoware_adapi_v1_msgs::msg::LocalizationInitializationState |
The topic represents the state of localization initialization |
/api/motion/state |
autoware_adapi_v1_msgs::msg::MotionState |
The topic represents the state of motion |
/api/autoware/get/emergency |
tier4_external_api_msgs::msg::Emergency |
The topic represents the state of external emergency |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The topic represents the state of gear |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/operation_mode/change_to_local |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to local |
/api/operation_mode/change_to_remote |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to remote |
/api/operation_mode/enable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to enable vehicle control by Autoware |
/api/operation_mode/disable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to disable vehicle control by Autoware |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/api/motion/accept_start |
autoware_adapi_v1_msgs::srv::AcceptStart |
The service to accept the vehicle to start |
/api/autoware/set/emergency |
tier4_external_api_msgs::srv::SetEmergency |
The service to set external emergency |
/planning/scenario_planning/max_velocity_candidates |
autoware_internal_planning_msgs::msg::VelocityLimit |
The topic to set maximum speed of the vehicle |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select tier4_state_rviz_plugin/AutowareStatePanel and press OK.
-
If the auto button is activated, can engage by clicking it.
Changelog for package tier4_state_rviz_plugin
0.50.0 (2026-02-14)
0.49.0 (2025-12-30)
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- chore(tier4_state_rviz_plugin): change ClearRoute button activation rule (#11598) feat(autoware_state_panel): allow route button activation for ARRIVED state
- Contributors: Autumn60, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
-
feat(tier4_state_rviz_plugin): save & load config of VelocitySteeringFactorsPanel (#10026) save & load rviz config
-
feat(tier4_state_rviz_plugin): use mrm description api (#10895)
- feat(tier4_state_rviz_plugin): use mrm description api
* fix timer cancel timing ---------
-
chore(tier4_state_rviz_plugin): add maintainer (#10905)
-
feat(tier4_state_rviz_plugin): display unknown value (#10861)
-
Contributors: Mitsuhiro Sakamoto, Takagi, Isamu
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- feat!: replace VelocityLimit messages with autoware_internal_planning_msgs (#10273)
- Contributors: Hayato Mizushima, Ryohsuke Mitsudome, Yutaka Kondo
0.42.0 (2025-03-03)
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- fix(tier4_state_rviz_plugin): fix bugprone-integer-division (#9628) fix: bugprone-integer-division
- Contributors: Fumiya Watanabe, kobayu858
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
File truncated at 100 lines see the full file
Package Dependencies
System Dependencies
Dependant Packages
Launch files
Messages
Services
Plugins
Recent questions tagged tier4_state_rviz_plugin at Robotics Stack Exchange
Package Summary
| Version | 0.50.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/autowarefoundation/autoware_universe.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-04-07 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Hiroki OTA
- Takagi, Isamu
- Khalil Selyan
- Ryohsuke Mitsudome
- Junya Sasaki
Authors
tier4_state_rviz_plugin
Purpose
This plugin displays the current status of autoware. This plugin also can engage from the panel.
Inputs / Outputs
Input
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/api/localization/initialization_state |
autoware_adapi_v1_msgs::msg::LocalizationInitializationState |
The topic represents the state of localization initialization |
/api/motion/state |
autoware_adapi_v1_msgs::msg::MotionState |
The topic represents the state of motion |
/api/autoware/get/emergency |
tier4_external_api_msgs::msg::Emergency |
The topic represents the state of external emergency |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The topic represents the state of gear |
Output
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/operation_mode/change_to_local |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to local |
/api/operation_mode/change_to_remote |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to remote |
/api/operation_mode/enable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to enable vehicle control by Autoware |
/api/operation_mode/disable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to disable vehicle control by Autoware |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/api/motion/accept_start |
autoware_adapi_v1_msgs::srv::AcceptStart |
The service to accept the vehicle to start |
/api/autoware/set/emergency |
tier4_external_api_msgs::srv::SetEmergency |
The service to set external emergency |
/planning/scenario_planning/max_velocity_candidates |
autoware_internal_planning_msgs::msg::VelocityLimit |
The topic to set maximum speed of the vehicle |
HowToUse
-
Start rviz and select panels/Add new panel.
-
Select tier4_state_rviz_plugin/AutowareStatePanel and press OK.
-
If the auto button is activated, can engage by clicking it.
Changelog for package tier4_state_rviz_plugin
0.50.0 (2026-02-14)
0.49.0 (2025-12-30)
0.48.0 (2025-11-18)
- Merge remote-tracking branch 'origin/main' into humble
- chore(tier4_state_rviz_plugin): change ClearRoute button activation rule (#11598) feat(autoware_state_panel): allow route button activation for ARRIVED state
- Contributors: Autumn60, Ryohsuke Mitsudome
0.47.1 (2025-08-14)
0.47.0 (2025-08-11)
-
feat(tier4_state_rviz_plugin): save & load config of VelocitySteeringFactorsPanel (#10026) save & load rviz config
-
feat(tier4_state_rviz_plugin): use mrm description api (#10895)
- feat(tier4_state_rviz_plugin): use mrm description api
* fix timer cancel timing ---------
-
chore(tier4_state_rviz_plugin): add maintainer (#10905)
-
feat(tier4_state_rviz_plugin): display unknown value (#10861)
-
Contributors: Mitsuhiro Sakamoto, Takagi, Isamu
0.46.0 (2025-06-20)
0.45.0 (2025-05-22)
0.44.2 (2025-06-10)
0.44.1 (2025-05-01)
0.44.0 (2025-04-18)
0.43.0 (2025-03-21)
- Merge remote-tracking branch 'origin/main' into chore/bump-version-0.43
- chore: rename from [autoware.universe]{.title-ref} to [autoware_universe]{.title-ref} (#10306)
- feat!: replace VelocityLimit messages with autoware_internal_planning_msgs (#10273)
- Contributors: Hayato Mizushima, Ryohsuke Mitsudome, Yutaka Kondo
0.42.0 (2025-03-03)
0.41.2 (2025-02-19)
- chore: bump version to 0.41.1 (#10088)
- Contributors: Ryohsuke Mitsudome
0.41.1 (2025-02-10)
0.41.0 (2025-01-29)
- Merge remote-tracking branch 'origin/main' into tmp/bot/bump_version_base
- fix(tier4_state_rviz_plugin): fix bugprone-integer-division (#9628) fix: bugprone-integer-division
- Contributors: Fumiya Watanabe, kobayu858
0.40.0 (2024-12-12)
- Merge branch 'main' into release-0.40.0
- Revert "chore(package.xml): bump version to 0.39.0 (#9587)" This reverts commit c9f0f2688c57b0f657f5c1f28f036a970682e7f5.
- chore: move rviz plugins from common to visualization/ folder (#9417)
- Contributors: Esteve Fernandez, Fumiya Watanabe
0.39.0 (2024-11-25)
- Merge commit '6a1ddbd08bd' into release-0.39.0
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
- fix: fix ticket links to point to https://github.com/autowarefoundation/autoware_universe (#9304)
File truncated at 100 lines see the full file