
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-01 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Kei Okada
Authors
- Kei Okada
jsk_pepper_startup
What’s this?
contains JSK’s launch file for startup Pepper with ROS
Running startup program
rossetip
roslaunch jsk_pepper_startup jsk_pepper_startup.launch network_interface:=<your network interaface (ex. eth0, enp0s31f6...)>
% For network_interface variable, please check ifconfig for the interface name your PC uses.
% You can play audio stream from Pepper’s audio ROS topic. Please see here for more details.
% In order to confirm if ROS-Pepper is booting, please check with rviz.
roscd pepper_bringup/config
rosrun rviz rviz -d pepper.rviz
Control Pepper via roseus
Please refer to README here.
Nodes, topics and services
These are a list of nodes and some useful topics and services from jsk_pepper_startup.launch.
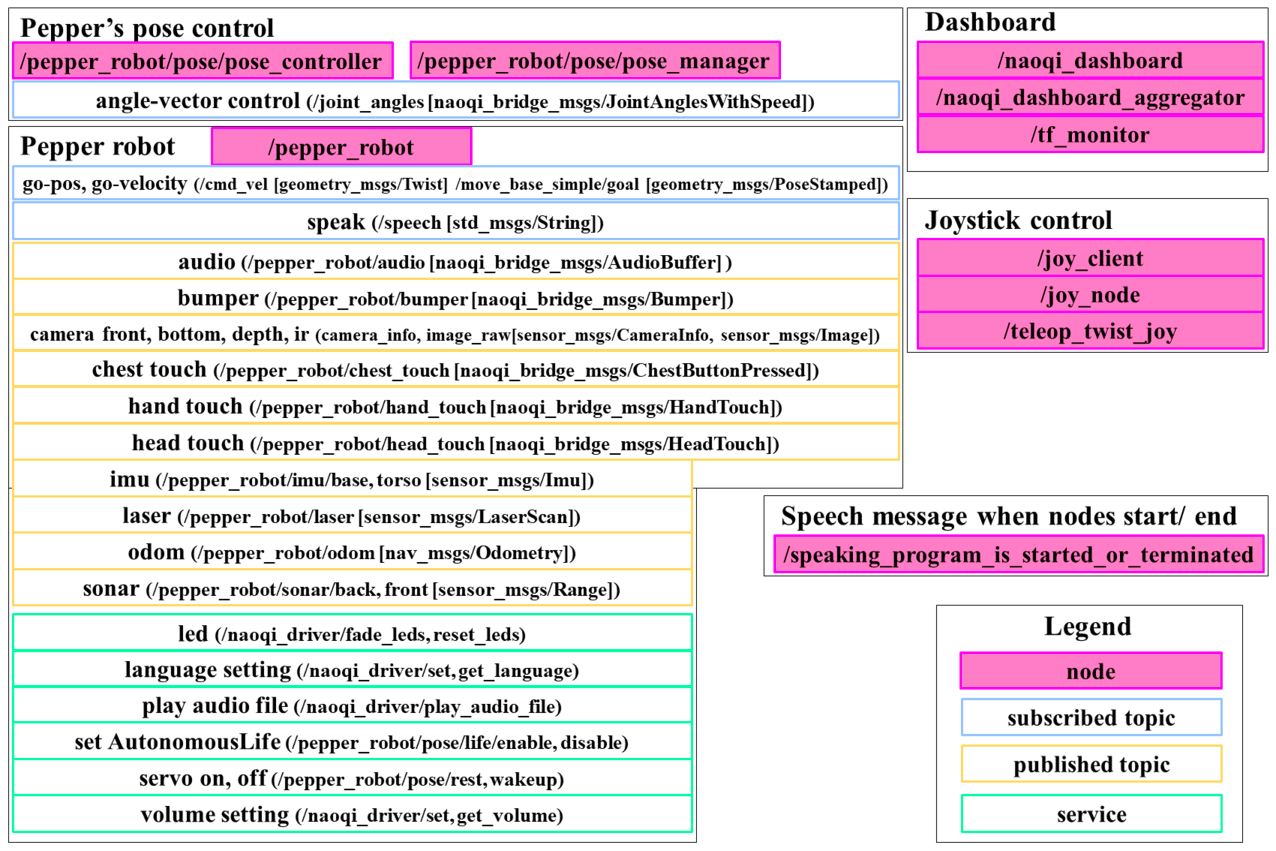
Pepper robot
Publications:
* /joint_states [sensor_msgs/JointState]
* /pepper_robot/audio [naoqi_bridge_msgs/AudioBuffer]
* /pepper_robot/bumper [naoqi_bridge_msgs/Bumper]
* /pepper_robot/camera/bottom/camera_info [sensor_msgs/CameraInfo]
* /pepper_robot/camera/bottom/image_raw [sensor_msgs/Image]
* /pepper_robot/camera/depth/camera_info [sensor_msgs/CameraInfo]
* /pepper_robot/camera/depth/image_raw [sensor_msgs/Image]
* /pepper_robot/camera/front/camera_info [sensor_msgs/CameraInfo]
* /pepper_robot/camera/front/image_raw [sensor_msgs/Image]
* /pepper_robot/camera/ir/camera_info [sensor_msgs/CameraInfo]
* /pepper_robot/camera/ir/image_raw [sensor_msgs/Image]
* /pepper_robot/chest_touch [naoqi_bridge_msgs/ChestButtonPressed]
* /pepper_robot/hand_touch [naoqi_bridge_msgs/HandTouch]
* /pepper_robot/head_touch [naoqi_bridge_msgs/HeadTouch]
* /pepper_robot/imu/base [sensor_msgs/Imu]
* /pepper_robot/imu/torso [sensor_msgs/Imu]
* /pepper_robot/info [naoqi_bridge_msgs/StringStamped]
* /pepper_robot/laser [sensor_msgs/LaserScan]
* /pepper_robot/odom [nav_msgs/Odometry]
* /pepper_robot/sonar/back [sensor_msgs/Range]
* /pepper_robot/sonar/front [sensor_msgs/Range]
* /tf [tf2_msgs/TFMessage]
Subscriptions:
* /cmd_vel [geometry_msgs/Twist]
* /joint_angles [naoqi_bridge_msgs/JointAnglesWithSpeed]
* /move_base_simple/goal [geometry_msgs/PoseStamped]
* /speech [std_msgs/String]
Services:
* /naoqi_driver/fade_leds
* /naoqi_driver/get_language
* /naoqi_driver/get_robot_config
* /naoqi_driver/get_volume
* /naoqi_driver/play_audio_file
* /naoqi_driver/reset_leds
* /naoqi_driver/set_language
* /naoqi_driver/set_volume
Pepper’s pose control
Publications:
* /pepper_robot/pose/get_life_state [std_msgs/String]
Action:
* /pepper_robot/pose/joint_trajectory [naoqi_bridge_msgs/JointTrajectoryAction]
Services:
* /pepper_robot/pose/life/disable
* /pepper_robot/pose/life/enable
* /pepper_robot/pose/life/get_state
* /pepper_robot/pose/rest
* /pepper_robot/pose/wakeup
Joystick

| Button | Function |
|---|---|
| 1 | Servo on/off |
| 2 | Interactive Life |
| 3 | Disable Life |
| 4+5 | Move head-p, head-y |
| 6+7 | Teleop Twist |
| 6+7+8 | Teleop Twist Turbo |
Related nodes: /joy_client, joy_node, /teleop_twist_joy
Dashboard
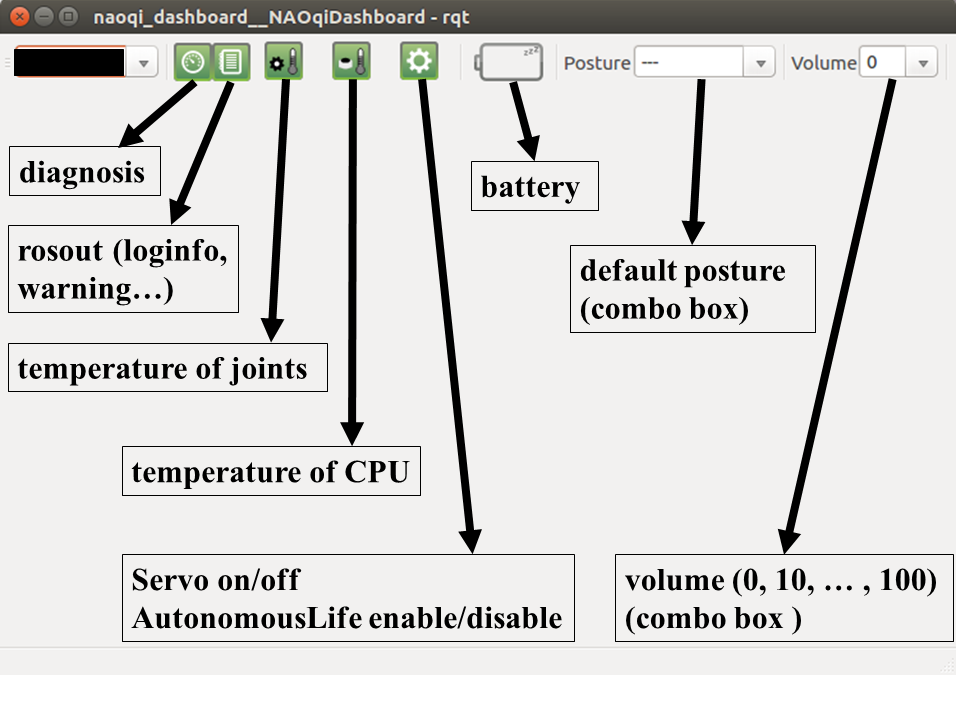
Related nodes: /naoqi_dashboard, /naoqi_dashboard_aggregator, /tf_monitor
Image
To visualize compressed image.
rosrun image_view image_view image:=/pepper_robot/camera/front/image_rect_color _image_transport:=compressed
From roseus, you can subscribe compressed images using following code.
(ros::subscribe "/pepper_robot/camera/front/image_rect_color/compressed" sensor_msgs::CompressedImage #'image_cb)
Sample demo
roslaunch nao_apps speech.launch nao_ip:=YOUR_PEPPER_IP
roslaunch nao_interaction_launchers nao_vision_interface.launch nao_ip:=YOUR_PEPPER_IP
roslaunch nao_apps behaviors.launch nao_ip:=YOUR_PEPPER_IP
rosrun jsk_pepper_startup sample.l
$ (demo1) ;; Pepper may speak twice. (This will be fixed as soon as possible.)
If you failed in launching jsk_pepper_startup.launch
-
Please try deleting all the terminals you created before, and even rebooting your PC. If another terminal of
roscorehas been left and the connected network has changed recently, connecting your PC and pepper may fail. -
If your terminal log looks like below, please reboot pepper.
front_cameraCamera Handle is empty - cannot retrieve image
front_cameraMight be a NAOqi problem. Try to restart the ALVideoDevice.
Some tips
-
If the getting started wizard appears on Pepper’s tablet, it may be better to turn it off because some functions are blocked. (ref: issue 926)
-
You may encounter the getting started wizard on Pepper’s tablet when you turn on the Pepper robot. If you cannot turn it off, please try this:
roslaunch naoqi_apps behavior_manager.launch. (behavior_manager.launchshould exist innaoqi_bridgepackage (kochigami-developbranch).)
If rosservice call /behavior_manager/is_behavior_running "data: 'boot-config'" => success: True,
Please try rosservice call /behavior_manager/stop_behavior "data: 'boot-config'".
If success: True returns, you should turn off the wizard.
You can also try ssh nao@<Pepper's IP> and
qicli call ALBehaviorManager.isBehaviorRunning boot-config
qicli call ALBehaviorManager.stopBehavior boot-config
- If you encounter the error below when you launch
naoqi_driver.launch, please refer to this issue.
what(): ALProxy::ALProxy
Can't find service: ROS-Driver-Audio
Changelog for package jsk_pepper_startup
1.1.0 (2017-07-16)
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- add launch_joy in jsk_pepper_startup launch
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_pepper_startup] remove meta package dependencies
- [jsk_pepper_startup] add launch_twitter arg for jsk_pepper_startup.launch
- Contributors: Kanae Kochigami, Shingo Kitagawa, Yuki Furuta
1.0.6 (2016-06-17)
- change from naoqi_msgs to naoqi_bridge_msgs (#614)
- Contributors: Kanae Kochigami
1.0.5 (2016-04-18)
1.0.4 (2016-03-21)
- package.xml add naoqi_pose depends to jsk_pepper_startup
- Contributors: Kei Okada
1.0.3 (2016-03-05)
1.0.2 (2016-02-14)
- jsk_pepper_startup: enable test https://github.com/furushchev/jsk_robot/commit/4b39a93b972008f5155e27a201b67a061c527a26
- [jsk_pepper_startup/CMakeLists.txt] disable test for a while
- [jsk_pepper_startup] use roslaunch_add_file_check instead of roslaunch-check in test file and skip hydro
- Contributors: Yuki Furuta, Kei Okada
1.0.1 (2015-11-19)
- move jsk_pepper_startup under jsk_naoqi_robot
1.0.0 (2015-11-06)
- [launch/jsk_pepper_startup.launch] use teleop_twist_joy instead of turtlebot_telop
- [package.xml] add depend to naoqi_bridge and naoqi_dashboard
- [joy-client.l] use naoqi_bridge_msgs instead of naoqi_msgs, update to pepper_robot/pose namespace
- [launch/jsk_pepper_startup.launch] remove old nao_app launch files
- fix to include pepper_full.launch for pepper_bringup > 0.1.4 (#452 <<https://github.com/jsk-ros-pkg/jsk_robot/issues/452>>)
- Contributors: Kei Okada
0.0.13 (2015-11-06)
0.0.12 (2015-11-06)
0.0.11 (2015-09-01)
- set robot/type, robot/name
- Contributors: Kei Okada
0.0.10 (2015-08-16)
0.0.9 (2015-08-03)
- package.xml: add joy
- [jsk_pepper_startup] add test_code to check if pepper launch is valid
- Contributors: Hitoshi Kamada, Kei Okada
0.0.8 (2015-07-16)
- use front/camera until https://github.com/ros-naoqi/pepper_robot/pull/1/files is merged
- Contributors: Kanae Kochigami
0.0.7 (2015-06-11)
- [package.xml] add depends to nao_apps
- [jsk_pepper_startup] add joy-client.l
- Contributors: Kanae Kochigami, Kei Okada
0.0.6 (2015-04-10)
0.0.5 (2015-04-08)
- modify msg name and launch file name
- Contributors: Jiang Jun
0.0.4 (2015-01-30)
0.0.3 (2015-01-09)
0.0.2 (2015-01-08)
- add install commands to cmake
- Contributors: Kei Okada
0.0.1 (2014-12-25)
- add depends to pepper_bringup
- fix launch file as of Dec 14
- use jsk_pepper_bringup and now naoqi repos
- add more depends
- tweet when imu is learge
- deleted displaying installed behaviors (only it was test)
- conversation added to face recognition
- remove nao_driver from depends
- add comment to how to modify voices
- add learn face example
- check timestamp to publish images
- add nao_interaction_msgs
- update sample, without face recognition
- use all cameras (top/bottom/depeth)
- use key for recognize-word
- use naoqi_sensors
- add simple demo code
- add nao_dashboard
- add sample/sample.l
- fix package.xml
- move tweet.l under nodes directory, listen /pepper_tweet
- some voice added
- some bugs fixed
- pepper speaking function added
- add jsk_peper_robot (add CMakeLists.txt launch/jsk_pepper_startup.launch package.xml tweet.l)
- Contributors: Kanae Kochigami, Kei Okada
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_201504_miraikan | |
| jsk_robot |
Launch files
- launch/play_audio_stream.launch
-
- nao_ip [default: $(optenv NAO_IP 127.0.0.1)]
- nao_port [default: $(optenv NAO_PORT 9559)]
- launch/jsk_pepper_startup.launch
-
- network_interface [default: eth0]
- launch_twitter [default: false]
- launch_joy [default: true]
- launch_play_audio_stream [default: true]
- launch_dashboard [default: true]
- autonomous_wakeup [default: false]
- port [default: 9090]
- apps/meeting/meeting.xml
Messages
Services
Plugins
Recent questions tagged jsk_pepper_startup at Robotics Stack Exchange
|
|
Package Summary
| Tags | No category tags. |
| Version | 1.1.0 |
| License | BSD |
| Build type | CATKIN |
| Use | RECOMMENDED |
Repository Summary
| Checkout URI | https://github.com/jsk-ros-pkg/jsk_robot.git |
| VCS Type | git |
| VCS Version | master |
| Last Updated | 2024-05-01 |
| Dev Status | DEVELOPED |
| CI status | No Continuous Integration |
| Released | RELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- Kei Okada
Authors
- Kei Okada
jsk_pepper_startup
What’s this?
contains JSK’s launch file for startup Pepper with ROS
Running startup program
rossetip
roslaunch jsk_pepper_startup jsk_pepper_startup.launch network_interface:=<your network interaface (ex. eth0, enp0s31f6...)>
% For network_interface variable, please check ifconfig for the interface name your PC uses.
% You can play audio stream from Pepper’s audio ROS topic. Please see here for more details.
% In order to confirm if ROS-Pepper is booting, please check with rviz.
roscd pepper_bringup/config
rosrun rviz rviz -d pepper.rviz
Control Pepper via roseus
Please refer to README here.
Nodes, topics and services
These are a list of nodes and some useful topics and services from jsk_pepper_startup.launch.
Pepper robot
Publications:
* /joint_states [sensor_msgs/JointState]
* /pepper_robot/audio [naoqi_bridge_msgs/AudioBuffer]
* /pepper_robot/bumper [naoqi_bridge_msgs/Bumper]
* /pepper_robot/camera/bottom/camera_info [sensor_msgs/CameraInfo]
* /pepper_robot/camera/bottom/image_raw [sensor_msgs/Image]
* /pepper_robot/camera/depth/camera_info [sensor_msgs/CameraInfo]
* /pepper_robot/camera/depth/image_raw [sensor_msgs/Image]
* /pepper_robot/camera/front/camera_info [sensor_msgs/CameraInfo]
* /pepper_robot/camera/front/image_raw [sensor_msgs/Image]
* /pepper_robot/camera/ir/camera_info [sensor_msgs/CameraInfo]
* /pepper_robot/camera/ir/image_raw [sensor_msgs/Image]
* /pepper_robot/chest_touch [naoqi_bridge_msgs/ChestButtonPressed]
* /pepper_robot/hand_touch [naoqi_bridge_msgs/HandTouch]
* /pepper_robot/head_touch [naoqi_bridge_msgs/HeadTouch]
* /pepper_robot/imu/base [sensor_msgs/Imu]
* /pepper_robot/imu/torso [sensor_msgs/Imu]
* /pepper_robot/info [naoqi_bridge_msgs/StringStamped]
* /pepper_robot/laser [sensor_msgs/LaserScan]
* /pepper_robot/odom [nav_msgs/Odometry]
* /pepper_robot/sonar/back [sensor_msgs/Range]
* /pepper_robot/sonar/front [sensor_msgs/Range]
* /tf [tf2_msgs/TFMessage]
Subscriptions:
* /cmd_vel [geometry_msgs/Twist]
* /joint_angles [naoqi_bridge_msgs/JointAnglesWithSpeed]
* /move_base_simple/goal [geometry_msgs/PoseStamped]
* /speech [std_msgs/String]
Services:
* /naoqi_driver/fade_leds
* /naoqi_driver/get_language
* /naoqi_driver/get_robot_config
* /naoqi_driver/get_volume
* /naoqi_driver/play_audio_file
* /naoqi_driver/reset_leds
* /naoqi_driver/set_language
* /naoqi_driver/set_volume
Pepper’s pose control
Publications:
* /pepper_robot/pose/get_life_state [std_msgs/String]
Action:
* /pepper_robot/pose/joint_trajectory [naoqi_bridge_msgs/JointTrajectoryAction]
Services:
* /pepper_robot/pose/life/disable
* /pepper_robot/pose/life/enable
* /pepper_robot/pose/life/get_state
* /pepper_robot/pose/rest
* /pepper_robot/pose/wakeup
Joystick
| Button | Function |
|---|---|
| 1 | Servo on/off |
| 2 | Interactive Life |
| 3 | Disable Life |
| 4+5 | Move head-p, head-y |
| 6+7 | Teleop Twist |
| 6+7+8 | Teleop Twist Turbo |
Related nodes: /joy_client, joy_node, /teleop_twist_joy
Dashboard
Related nodes: /naoqi_dashboard, /naoqi_dashboard_aggregator, /tf_monitor
Image
To visualize compressed image.
rosrun image_view image_view image:=/pepper_robot/camera/front/image_rect_color _image_transport:=compressed
From roseus, you can subscribe compressed images using following code.
(ros::subscribe "/pepper_robot/camera/front/image_rect_color/compressed" sensor_msgs::CompressedImage #'image_cb)
Sample demo
roslaunch nao_apps speech.launch nao_ip:=YOUR_PEPPER_IP
roslaunch nao_interaction_launchers nao_vision_interface.launch nao_ip:=YOUR_PEPPER_IP
roslaunch nao_apps behaviors.launch nao_ip:=YOUR_PEPPER_IP
rosrun jsk_pepper_startup sample.l
$ (demo1) ;; Pepper may speak twice. (This will be fixed as soon as possible.)
If you failed in launching jsk_pepper_startup.launch
-
Please try deleting all the terminals you created before, and even rebooting your PC. If another terminal of
roscorehas been left and the connected network has changed recently, connecting your PC and pepper may fail. -
If your terminal log looks like below, please reboot pepper.
front_cameraCamera Handle is empty - cannot retrieve image
front_cameraMight be a NAOqi problem. Try to restart the ALVideoDevice.
Some tips
-
If the getting started wizard appears on Pepper’s tablet, it may be better to turn it off because some functions are blocked. (ref: issue 926)
-
You may encounter the getting started wizard on Pepper’s tablet when you turn on the Pepper robot. If you cannot turn it off, please try this:
roslaunch naoqi_apps behavior_manager.launch. (behavior_manager.launchshould exist innaoqi_bridgepackage (kochigami-developbranch).)
If rosservice call /behavior_manager/is_behavior_running "data: 'boot-config'" => success: True,
Please try rosservice call /behavior_manager/stop_behavior "data: 'boot-config'".
If success: True returns, you should turn off the wizard.
You can also try ssh nao@<Pepper's IP> and
qicli call ALBehaviorManager.isBehaviorRunning boot-config
qicli call ALBehaviorManager.stopBehavior boot-config
- If you encounter the error below when you launch
naoqi_driver.launch, please refer to this issue.
what(): ALProxy::ALProxy
Can't find service: ROS-Driver-Audio
Changelog for package jsk_pepper_startup
1.1.0 (2017-07-16)
1.0.9 (2016-11-09)
1.0.8 (2016-11-08)
1.0.7 (2016-11-02)
- add launch_joy in jsk_pepper_startup launch
- [jsk_naoqi_robot] speak when program is started (by unix:sleep) or terminated (by overriden roseus-sigint-handler)
- [jsk_pepper_startup] remove meta package dependencies
- [jsk_pepper_startup] add launch_twitter arg for jsk_pepper_startup.launch
- Contributors: Kanae Kochigami, Shingo Kitagawa, Yuki Furuta
1.0.6 (2016-06-17)
- change from naoqi_msgs to naoqi_bridge_msgs (#614)
- Contributors: Kanae Kochigami
1.0.5 (2016-04-18)
1.0.4 (2016-03-21)
- package.xml add naoqi_pose depends to jsk_pepper_startup
- Contributors: Kei Okada
1.0.3 (2016-03-05)
1.0.2 (2016-02-14)
- jsk_pepper_startup: enable test https://github.com/furushchev/jsk_robot/commit/4b39a93b972008f5155e27a201b67a061c527a26
- [jsk_pepper_startup/CMakeLists.txt] disable test for a while
- [jsk_pepper_startup] use roslaunch_add_file_check instead of roslaunch-check in test file and skip hydro
- Contributors: Yuki Furuta, Kei Okada
1.0.1 (2015-11-19)
- move jsk_pepper_startup under jsk_naoqi_robot
1.0.0 (2015-11-06)
- [launch/jsk_pepper_startup.launch] use teleop_twist_joy instead of turtlebot_telop
- [package.xml] add depend to naoqi_bridge and naoqi_dashboard
- [joy-client.l] use naoqi_bridge_msgs instead of naoqi_msgs, update to pepper_robot/pose namespace
- [launch/jsk_pepper_startup.launch] remove old nao_app launch files
- fix to include pepper_full.launch for pepper_bringup > 0.1.4 (#452 <<https://github.com/jsk-ros-pkg/jsk_robot/issues/452>>)
- Contributors: Kei Okada
0.0.13 (2015-11-06)
0.0.12 (2015-11-06)
0.0.11 (2015-09-01)
- set robot/type, robot/name
- Contributors: Kei Okada
0.0.10 (2015-08-16)
0.0.9 (2015-08-03)
- package.xml: add joy
- [jsk_pepper_startup] add test_code to check if pepper launch is valid
- Contributors: Hitoshi Kamada, Kei Okada
0.0.8 (2015-07-16)
- use front/camera until https://github.com/ros-naoqi/pepper_robot/pull/1/files is merged
- Contributors: Kanae Kochigami
0.0.7 (2015-06-11)
- [package.xml] add depends to nao_apps
- [jsk_pepper_startup] add joy-client.l
- Contributors: Kanae Kochigami, Kei Okada
0.0.6 (2015-04-10)
0.0.5 (2015-04-08)
- modify msg name and launch file name
- Contributors: Jiang Jun
0.0.4 (2015-01-30)
0.0.3 (2015-01-09)
0.0.2 (2015-01-08)
- add install commands to cmake
- Contributors: Kei Okada
0.0.1 (2014-12-25)
- add depends to pepper_bringup
- fix launch file as of Dec 14
- use jsk_pepper_bringup and now naoqi repos
- add more depends
- tweet when imu is learge
- deleted displaying installed behaviors (only it was test)
- conversation added to face recognition
- remove nao_driver from depends
- add comment to how to modify voices
- add learn face example
- check timestamp to publish images
- add nao_interaction_msgs
- update sample, without face recognition
- use all cameras (top/bottom/depeth)
- use key for recognize-word
- use naoqi_sensors
- add simple demo code
- add nao_dashboard
- add sample/sample.l
- fix package.xml
- move tweet.l under nodes directory, listen /pepper_tweet
- some voice added
- some bugs fixed
- pepper speaking function added
- add jsk_peper_robot (add CMakeLists.txt launch/jsk_pepper_startup.launch package.xml tweet.l)
- Contributors: Kanae Kochigami, Kei Okada
Wiki Tutorials
Package Dependencies
System Dependencies
Dependant Packages
| Name | Deps |
|---|---|
| jsk_201504_miraikan | |
| jsk_robot |
Launch files
- launch/play_audio_stream.launch
-
- nao_ip [default: $(optenv NAO_IP 127.0.0.1)]
- nao_port [default: $(optenv NAO_PORT 9559)]
- launch/jsk_pepper_startup.launch
-
- network_interface [default: eth0]
- launch_twitter [default: false]
- launch_joy [default: true]
- launch_play_audio_stream [default: true]
- launch_dashboard [default: true]
- autonomous_wakeup [default: false]
- port [default: 9090]
- apps/meeting/meeting.xml