
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ieiauto/autodrrt.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
Authors
traffic_light_visualization
Purpose
The traffic_light_visualization is a package that includes two visualizing nodes:
- traffic_light_map_visualizer is a node that shows traffic lights color status and position on rviz as markers.
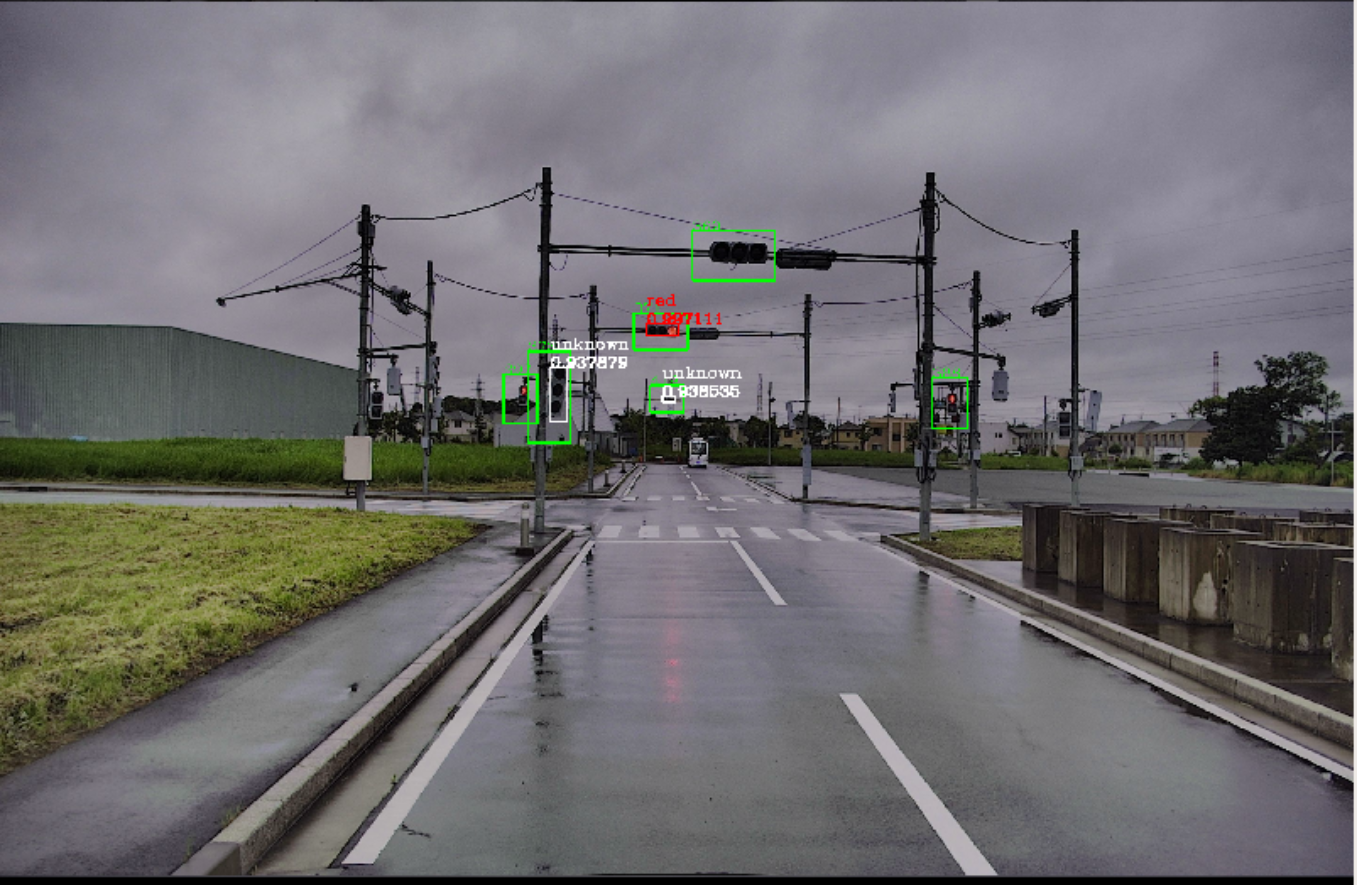
- traffic_light_roi_visualizer is a node that draws the result of traffic light recognition nodes (traffic light status, position and classification probability) on the input image as shown in the following figure and publishes it.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/vector_map |
autoware_auto_mapping_msgs::msg::HADMapBin |
vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray |
marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/image |
sensor_msgs::msg::Image |
the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_ssd_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image |
output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
enable_fine_detection |
bool | false | whether to visualize result of the traffic light fine detection |
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- enable_fine_detection [default: false]
Messages
Services
Plugins
Recent questions tagged traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ieiauto/autodrrt.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
Authors
traffic_light_visualization
Purpose
The traffic_light_visualization is a package that includes two visualizing nodes:
- traffic_light_map_visualizer is a node that shows traffic lights color status and position on rviz as markers.
- traffic_light_roi_visualizer is a node that draws the result of traffic light recognition nodes (traffic light status, position and classification probability) on the input image as shown in the following figure and publishes it.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/vector_map |
autoware_auto_mapping_msgs::msg::HADMapBin |
vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray |
marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/image |
sensor_msgs::msg::Image |
the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_ssd_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image |
output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
enable_fine_detection |
bool | false | whether to visualize result of the traffic light fine detection |
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- enable_fine_detection [default: false]
Messages
Services
Plugins
Recent questions tagged traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ieiauto/autodrrt.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
Authors
traffic_light_visualization
Purpose
The traffic_light_visualization is a package that includes two visualizing nodes:
- traffic_light_map_visualizer is a node that shows traffic lights color status and position on rviz as markers.
- traffic_light_roi_visualizer is a node that draws the result of traffic light recognition nodes (traffic light status, position and classification probability) on the input image as shown in the following figure and publishes it.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/vector_map |
autoware_auto_mapping_msgs::msg::HADMapBin |
vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray |
marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/image |
sensor_msgs::msg::Image |
the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_ssd_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image |
output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
enable_fine_detection |
bool | false | whether to visualize result of the traffic light fine detection |
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- enable_fine_detection [default: false]
Messages
Services
Plugins
Recent questions tagged traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ieiauto/autodrrt.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
Authors
traffic_light_visualization
Purpose
The traffic_light_visualization is a package that includes two visualizing nodes:
- traffic_light_map_visualizer is a node that shows traffic lights color status and position on rviz as markers.
- traffic_light_roi_visualizer is a node that draws the result of traffic light recognition nodes (traffic light status, position and classification probability) on the input image as shown in the following figure and publishes it.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/vector_map |
autoware_auto_mapping_msgs::msg::HADMapBin |
vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray |
marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/image |
sensor_msgs::msg::Image |
the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_ssd_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image |
output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
enable_fine_detection |
bool | false | whether to visualize result of the traffic light fine detection |
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- enable_fine_detection [default: false]
Messages
Services
Plugins
Recent questions tagged traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ieiauto/autodrrt.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
Authors
traffic_light_visualization
Purpose
The traffic_light_visualization is a package that includes two visualizing nodes:
- traffic_light_map_visualizer is a node that shows traffic lights color status and position on rviz as markers.
- traffic_light_roi_visualizer is a node that draws the result of traffic light recognition nodes (traffic light status, position and classification probability) on the input image as shown in the following figure and publishes it.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/vector_map |
autoware_auto_mapping_msgs::msg::HADMapBin |
vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray |
marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/image |
sensor_msgs::msg::Image |
the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_ssd_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image |
output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
enable_fine_detection |
bool | false | whether to visualize result of the traffic light fine detection |
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- enable_fine_detection [default: false]
Messages
Services
Plugins
Recent questions tagged traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ieiauto/autodrrt.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
Authors
traffic_light_visualization
Purpose
The traffic_light_visualization is a package that includes two visualizing nodes:
- traffic_light_map_visualizer is a node that shows traffic lights color status and position on rviz as markers.
- traffic_light_roi_visualizer is a node that draws the result of traffic light recognition nodes (traffic light status, position and classification probability) on the input image as shown in the following figure and publishes it.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/vector_map |
autoware_auto_mapping_msgs::msg::HADMapBin |
vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray |
marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/image |
sensor_msgs::msg::Image |
the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_ssd_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image |
output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
enable_fine_detection |
bool | false | whether to visualize result of the traffic light fine detection |
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- enable_fine_detection [default: false]
Messages
Services
Plugins
Recent questions tagged traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ieiauto/autodrrt.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
Authors
traffic_light_visualization
Purpose
The traffic_light_visualization is a package that includes two visualizing nodes:
- traffic_light_map_visualizer is a node that shows traffic lights color status and position on rviz as markers.
- traffic_light_roi_visualizer is a node that draws the result of traffic light recognition nodes (traffic light status, position and classification probability) on the input image as shown in the following figure and publishes it.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/vector_map |
autoware_auto_mapping_msgs::msg::HADMapBin |
vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray |
marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/image |
sensor_msgs::msg::Image |
the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_ssd_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image |
output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
enable_fine_detection |
bool | false | whether to visualize result of the traffic light fine detection |
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- enable_fine_detection [default: false]
Messages
Services
Plugins
Recent questions tagged traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ieiauto/autodrrt.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
Authors
traffic_light_visualization
Purpose
The traffic_light_visualization is a package that includes two visualizing nodes:
- traffic_light_map_visualizer is a node that shows traffic lights color status and position on rviz as markers.
- traffic_light_roi_visualizer is a node that draws the result of traffic light recognition nodes (traffic light status, position and classification probability) on the input image as shown in the following figure and publishes it.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/vector_map |
autoware_auto_mapping_msgs::msg::HADMapBin |
vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray |
marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/image |
sensor_msgs::msg::Image |
the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_ssd_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image |
output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
enable_fine_detection |
bool | false | whether to visualize result of the traffic light fine detection |
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- enable_fine_detection [default: false]
Messages
Services
Plugins
Recent questions tagged traffic_light_visualization at Robotics Stack Exchange
Package Summary
| Version | 0.1.0 |
| License | Apache License 2.0 |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | |
| Checkout URI | https://github.com/ieiauto/autodrrt.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2026-01-05 |
| Dev Status | UNKNOWN |
| Released | UNRELEASED |
| Contributing |
Help Wanted (-)
Good First Issues (-) Pull Requests to Review (-) |
Package Description
Maintainers
- Yukihiro Saito
Authors
traffic_light_visualization
Purpose
The traffic_light_visualization is a package that includes two visualizing nodes:
- traffic_light_map_visualizer is a node that shows traffic lights color status and position on rviz as markers.
- traffic_light_roi_visualizer is a node that draws the result of traffic light recognition nodes (traffic light status, position and classification probability) on the input image as shown in the following figure and publishes it.
Inner-workings / Algorithms
Inputs / Outputs
traffic_light_map_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/vector_map |
autoware_auto_mapping_msgs::msg::HADMapBin |
vector map |
Output
| Name | Type | Description |
|---|---|---|
~/output/traffic_light |
visualization_msgs::msg::MarkerArray |
marker array that indicates status of traffic lights |
traffic_light_roi_visualizer
Input
| Name | Type | Description |
|---|---|---|
~/input/tl_state |
tier4_perception_msgs::msg::TrafficSignalArray |
status of traffic lights |
~/input/image |
sensor_msgs::msg::Image |
the image captured by perception cameras |
~/input/rois |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_ssd_fine_detector
|
~/input/rough/rois (option) |
tier4_perception_msgs::msg::TrafficLightRoiArray |
the ROIs detected by traffic_light_map_based_detector
|
Output
| Name | Type | Description |
|---|---|---|
~/output/image |
sensor_msgs::msg::Image |
output image with ROIs |
Parameters
traffic_light_map_visualizer
None
traffic_light_roi_visualizer
Node Parameters
| Name | Type | Default Value | Description |
|---|---|---|---|
enable_fine_detection |
bool | false | whether to visualize result of the traffic light fine detection |
Assumptions / Known limits
(Optional) Error detection and handling
(Optional) Performance characterization
(Optional) References/External links
(Optional) Future extensions / Unimplemented parts
Package Dependencies
System Dependencies
Dependant Packages
Launch files
- launch/traffic_light_map_visualizer.launch.xml
-
- input/tl_state [default: traffic_signals]
- input/vector_map [default: /map/vector_map]
- output/traffic_light [default: traffic_signals/markers]
- launch/traffic_light_roi_visualizer.launch.xml
-
- input/image [default: /camera/image_raw]
- input/rois [default: ~/input/rois]
- input/rough/rois [default: ~/rough/rois]
- input/traffic_signals [default: ~/input/traffic_signals]
- output/image [default: ~/debug/rois]
- enable_fine_detection [default: false]